
Repository Summary
| Description | Aerostack2 Aerial platform for the PX4 autopilot |
| Checkout URI | https://github.com/aerostack2/as2_platform_pixhawk.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-07-03 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | px4 pixhawk ros2 aerostack2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| as2_platform_pixhawk | 0.2.2 |
README
as2_platform_pixhawk
Aerostack2 Aerial platform for the PX4 autopilot
For a complete installation guide follow PX4 instructions
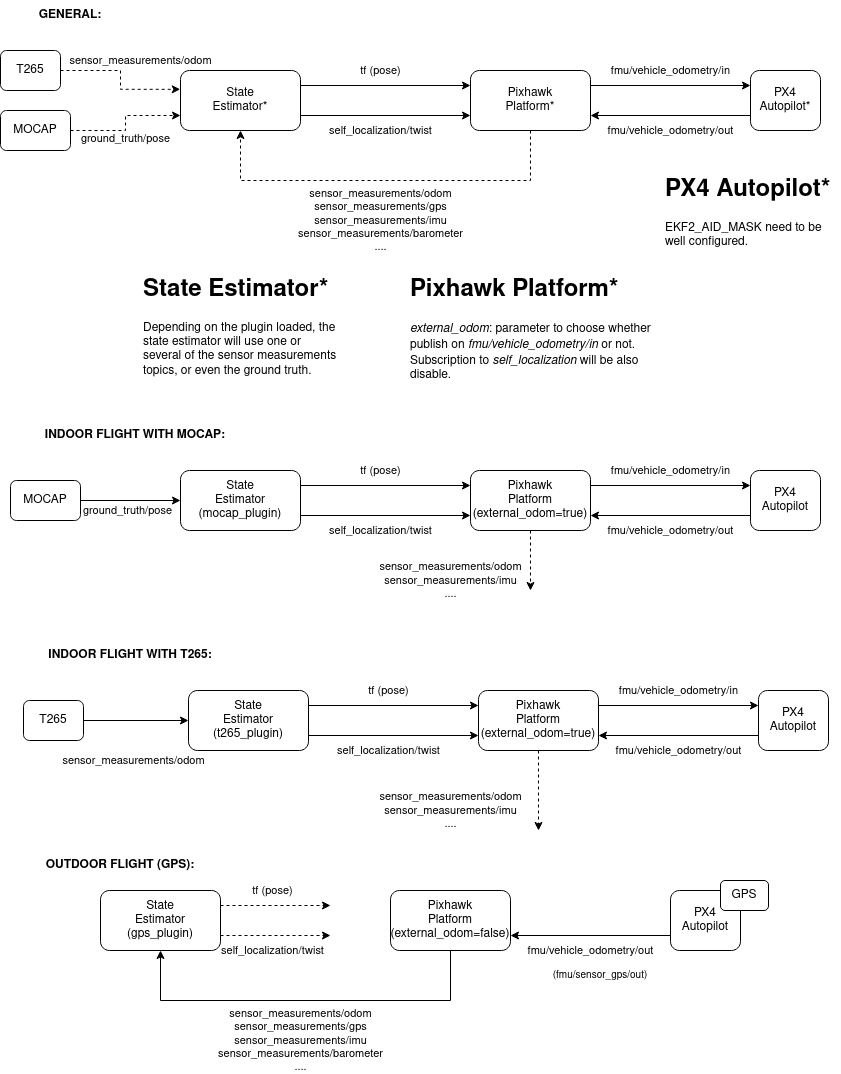
Multiple PX4 Operation modes:
PX4 Msgs:
Availables:
- /fmu/in/obstacle_distance
- /fmu/in/offboard_control_mode
- /fmu/in/onboard_computer_status
- /fmu/in/sensor_optical_flow
- /fmu/in/telemetry_status
- /fmu/in/trajectory_setpoint
- /fmu/in/vehicle_attitude_setpoint
- /fmu/in/vehicle_command
- /fmu/in/vehicle_mocap_odometry
- /fmu/in/vehicle_rates_setpoint
- /fmu/in/vehicle_trajectory_bezier
- /fmu/in/vehicle_trajectory_waypoint
- /fmu/in/vehicle_visual_odometry
- /fmu/out/failsafe_flags
- /fmu/out/sensor_combined
- /fmu/out/timesync_status
- /fmu/out/vehicle_attitude
- /fmu/out/vehicle_control_mode
- /fmu/out/vehicle_global_position
- /fmu/out/vehicle_gps_position
- /fmu/out/vehicle_local_position
- /fmu/out/vehicle_odometry
- /fmu/out/vehicle_status
Used:
- IMU: /fmu/out/sensor_combined
- Set Control Mode: /fmu/out/vehicle_control_mode
- Get GPS: /fmu/out/vehicle_gps_position
-
Get position: /fmu/out/vehicle_odometry
- Set control Mode: /fmu/in/offboard_control_mode
- Set trajectory reference: /fmu/in/trajectory_setpoint
- Set attitude reference: /fmu/in/vehicle_attitude_setpoint
- Set rate reference: /fmu/in/vehicle_rates_setpoint
- Send vehicle command for arm: /fmu/in/vehicle_command
- Send vehicle visual odometry: /fmu/in/vehicle_visual_odometry
Not Availables:
- Get battery status: “/fmu/out/battery_status”
- Kill switch: fmu/in/manual_control_switches
Not Used:
- /fmu/in/obstacle_distance
- /fmu/in/onboard_computer_status
- /fmu/in/sensor_optical_flow
- /fmu/in/telemetry_status
- /fmu/in/vehicle_mocap_odometry
- /fmu/in/vehicle_trajectory_bezier
- /fmu/in/vehicle_trajectory_waypoint
- /fmu/out/failsafe_flags
- /fmu/out/timesync_status
- /fmu/out/vehicle_attitude
- /fmu/out/vehicle_control_mode
- /fmu/out/vehicle_global_position
- /fmu/out/vehicle_local_position
- /fmu/out/vehicle_status
CONTRIBUTING
Any contribution that you make to this repository will be under the 3-Clause BSD License, as dictated by that license.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro github. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.