
Repository Summary
| Description | ROS packages for GUNDAM robots |
| Checkout URI | https://github.com/gundam-global-challenge/gundam_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-28 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| gundam_robot | 0.0.4 |
| gundam_rx78_control | 0.0.4 |
| gundam_rx78_description | 0.0.4 |
| gundam_rx78_gazebo | 0.0.4 |
README
gundam_robot 
ROS packages for GUNDAM robots
How to visualize URDF model
To visualize URDF file in your rviz, you can use display.launch file.
$ roslaunch gundam_rx78_description display.launch
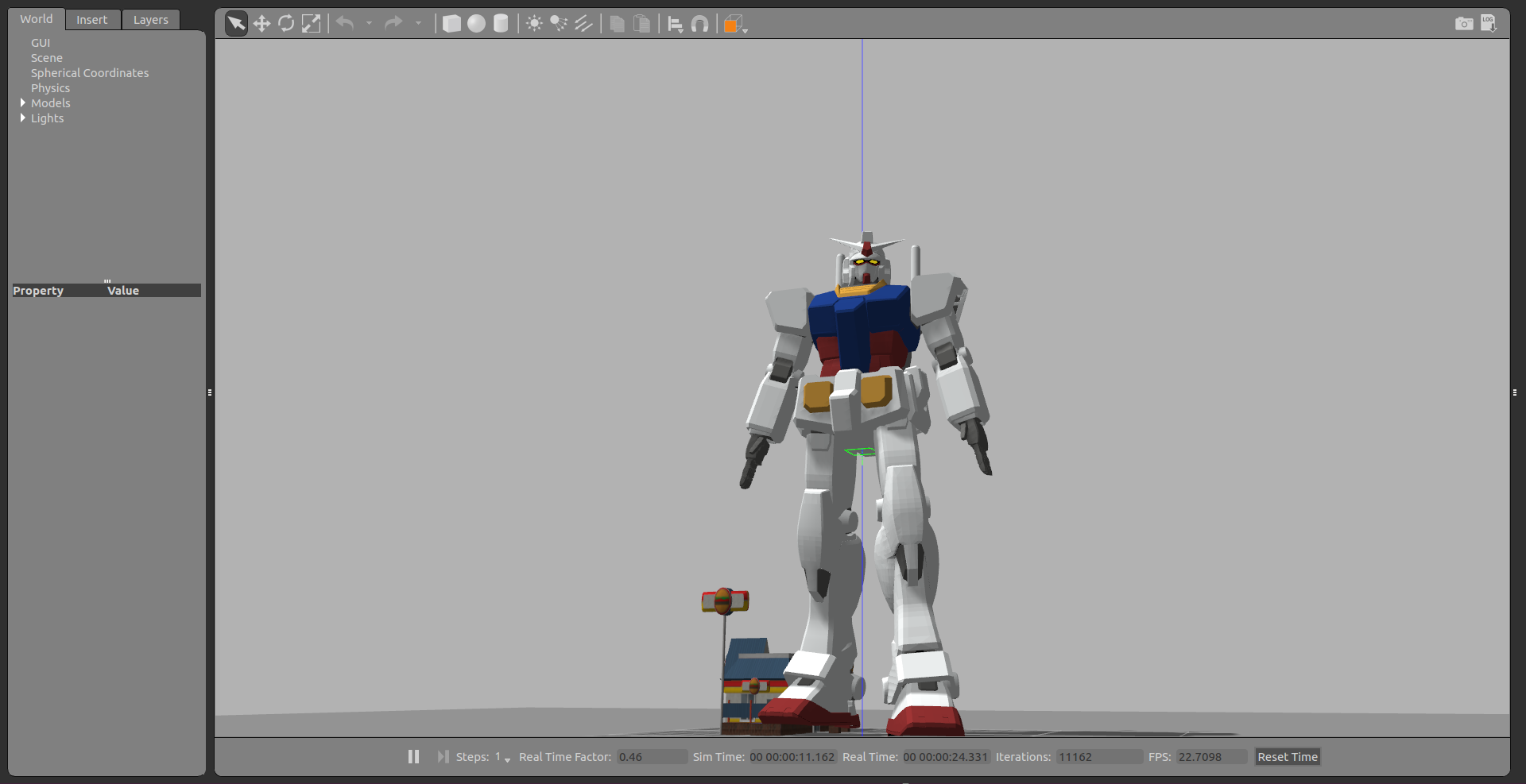
How to run gazebo simulation
To run a gazebo dynamics simulation, you can start gundam_rx78_world.launch.
$ roslaunch gundam_rx78_gazebo gundam_rx78_world.launch
To control joint angles, try a sample script.
# move upper body
$ rosrun gundam_rx78_control joint_trajectory_client_example.py
Experimental
You can run “Robot”-like walking pattern on simulation
$ roslaunch gundam_rx78_gazebo gundam_rx78_walk.launch
# step
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/step.csv
# walk forward
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/walk-forward.csv
# walk backward
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/walk-backward.csv
# walk to right
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/walk-to-right.csv
# walk to left
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/walk-to-left.csv
# turn right
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/turn-right.csv
# turn left
$ rosrun gundam_rx78_control joint_trajectory_client_csv.py `rospack find gundam_rx78_control`/sample/csv/turn-left.csv
Note that currently, we have several limitation on this simulation, we only have position controller etc.
You can also find sample motion control files in the gundam_rx78_control/sample directory.
For Developers Only
How to setup workspace
We recommend you to use wstool to setup you workspace.
$ mkdir -p catkin_ws/src
$ cd catkin_ws
$ wstool init src
$ wstool merge -t src https://raw.githubusercontent.com/gundam-global-challenge/gundam_robot/.gundam.rosinstall
$ wstool update -t src
$ source /opt/ros/$ROS_DISTRO/setup.bash
$ rosdep install -y -r --from-paths src --ignore-src
$ catkin build
$ source devel/setup.bash
How to install mesh and urdf file
The Gundam URDF file is automatically generated from Collada DAE file.
First, download the Gundam Collada file (ex. GGC_TestModel_rx78_20170112.DAE) under gundam_rx78_description directory.
Then, run ./scripts/dae_to_urdf.py file with the downloaded file name as an argument. This will create mesh files under meshes/ directory and create the URDF file under urdf/ directory.
Finally, rename the file name to urdf/gundam_rx78.urdf
$ roscd gundam_rx78_description
$ python ./scripts/ggc_dae_to_urdf.py GGC_TestModel_rx78_20170112.DAE --write_mesh
$ mv urdf/GGC_TestModel_rx78_20170112.urdf urdf/gundam_rx78.urdf
You have to use urdf_parser_py version 0.4.0 instead of version 0.4.1.