
|
|
Repository Summary
| Description | common programs for jsk-ros-pkg |
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-07 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | hacktoberfest |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| audio_video_recorder | 2.2.16 |
| jsk_common | 2.2.16 |
| dynamic_tf_publisher | 2.2.16 |
| jsk_data | 2.2.16 |
| jsk_network_tools | 2.2.16 |
| image_view2 | 2.2.16 |
| multi_map_server | 2.2.16 |
| jsk_rosbag_tools | 2.2.16 |
| jsk_tilt_laser | 2.2.16 |
| jsk_tools | 2.2.16 |
| jsk_topic_tools | 2.2.16 |
| virtual_force_publisher | 2.2.16 |
README
jsk_common
![]()

![]()

Document
See readthedocs for document.
Deb Build Status
| Package | Kinetic (Xenial) | Melodic (Bionic) | Melodic (Stretch) |
|---|---|---|---|
| jsk_common (arm64) | |||
| jsk_common (armhf) | — | ||
| jsk_common (i386) | — | — | |
| jsk_common (amd64) |
Install
If you use Kinetic on Debian or Ubuntu, you can run
apt-get install ros-kinetic-jsk-common
Or, if you are willing to install from source, you instead can run
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone http://github.com/jsk-ros-pkg/jsk_common
cd jsk_common
rosdep install -y -r --from-path . --ignore-src
cd ../../
catkin build
For hacker
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --from-source hydro
For hrpsys user
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --rtm hydro
For hrpsys hacker
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --from-source --rtm hydro
jsk.rosbuild generates filesystem as follows:
~ --- ros
+ --- hydro_parent: Only availabe if --from-source option is enabled
+ --- src: maintained by wstool
+ --- build: generated by catkin_tools
+ --- devel: generated by catkin_tools
+--- hydro
+ --- src: maintained by wstool
+ --- build: generated by catkin_tools
+ --- devel: generated by catkin_tools
Watch all the jsk github repositories.
Please use this
Slack for JSK Lab members 
You can login to slack from here. You can create account using imi address.
scudcloud is a desktop client for slack and you can install it by following instruction.
You can restart travis and jenkins from slack’s #travis channel.
You can browse all channels by clicking Channels in a left menu bar.
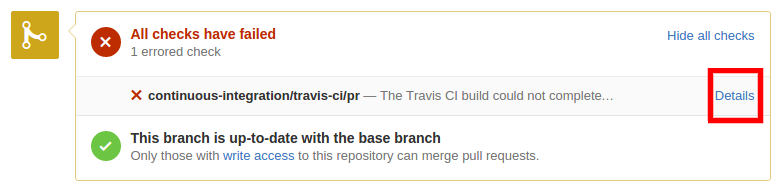
Restart travis from slack

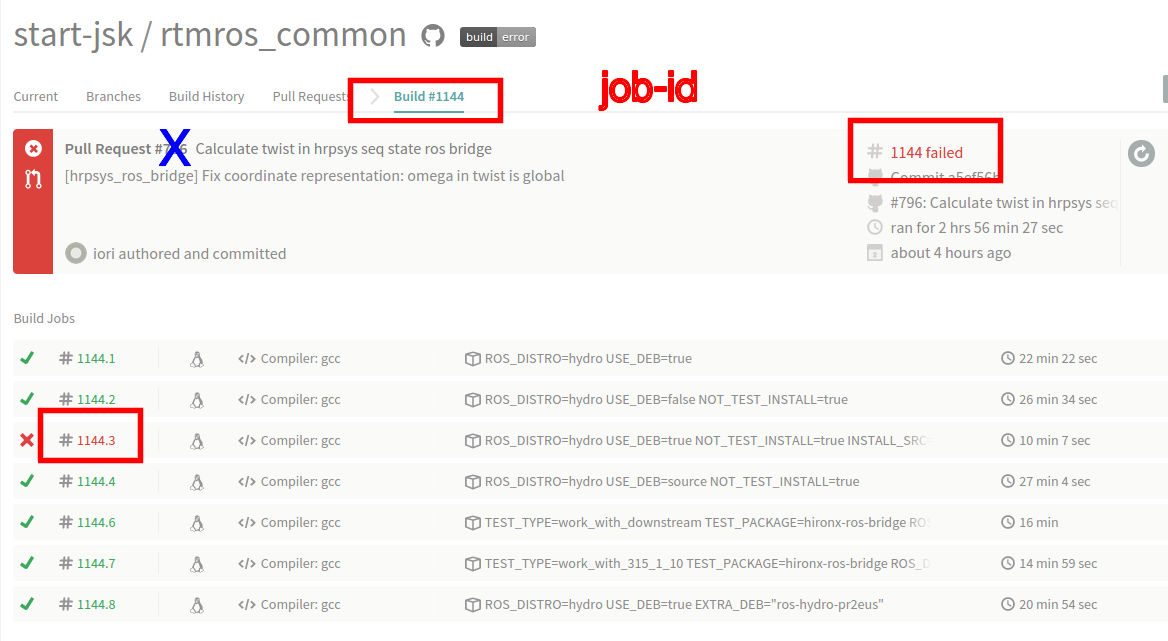
Type restart travis <job-id> from slack#travis channel.
N.B.: <job-id> is not the number of Pull-request.
you can get <job-id> from Travis page.
Restart docker from slack
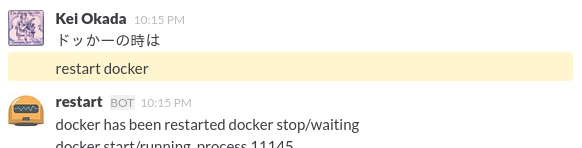
Type restart docker from slack#travis channel.
CONTRIBUTING
|
|
Repository Summary
| Description | common programs for jsk-ros-pkg |
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-07 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | hacktoberfest |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| audio_video_recorder | 2.2.16 |
| jsk_common | 2.2.16 |
| dynamic_tf_publisher | 2.2.16 |
| jsk_data | 2.2.16 |
| jsk_network_tools | 2.2.16 |
| image_view2 | 2.2.16 |
| multi_map_server | 2.2.16 |
| jsk_rosbag_tools | 2.2.16 |
| jsk_tilt_laser | 2.2.16 |
| jsk_tools | 2.2.16 |
| jsk_topic_tools | 2.2.16 |
| virtual_force_publisher | 2.2.16 |
README
jsk_common
![]()
![]()
Document
See readthedocs for document.
Deb Build Status
| Package | Kinetic (Xenial) | Melodic (Bionic) | Melodic (Stretch) |
|---|---|---|---|
| jsk_common (arm64) | |||
| jsk_common (armhf) | — | ||
| jsk_common (i386) | — | — | |
| jsk_common (amd64) |
Install
If you use Kinetic on Debian or Ubuntu, you can run
apt-get install ros-kinetic-jsk-common
Or, if you are willing to install from source, you instead can run
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone http://github.com/jsk-ros-pkg/jsk_common
cd jsk_common
rosdep install -y -r --from-path . --ignore-src
cd ../../
catkin build
For hacker
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --from-source hydro
For hrpsys user
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --rtm hydro
For hrpsys hacker
wget -q -O /tmp/jsk.rosbuild https://raw.github.com/jsk-ros-pkg/jsk_common/master/jsk.rosbuild
bash /tmp/jsk.rosbuild --from-source --rtm hydro
jsk.rosbuild generates filesystem as follows:
~ --- ros
+ --- hydro_parent: Only availabe if --from-source option is enabled
+ --- src: maintained by wstool
+ --- build: generated by catkin_tools
+ --- devel: generated by catkin_tools
+--- hydro
+ --- src: maintained by wstool
+ --- build: generated by catkin_tools
+ --- devel: generated by catkin_tools
Watch all the jsk github repositories.
Please use this
Slack for JSK Lab members
You can login to slack from here. You can create account using imi address.
scudcloud is a desktop client for slack and you can install it by following instruction.
You can restart travis and jenkins from slack’s #travis channel.
You can browse all channels by clicking Channels in a left menu bar.
Restart travis from slack
Type restart travis <job-id> from slack#travis channel.
N.B.: <job-id> is not the number of Pull-request.
you can get <job-id> from Travis page.
Restart docker from slack
Type restart docker from slack#travis channel.