
|
ldrobot-lidar-ros2 repositoryscan ros2 ldlidar ld-air ld16 ld19 ldlidar ldlidar_component ldlidar_node |
|
|
Repository Summary
| Description | ROS2 package for LDRobot lidar. Based on ROS2 Lifecycle nodes |
| Checkout URI | https://github.com/myzhar/ldrobot-lidar-ros2.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-05-02 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | scan ros2 ldlidar ld-air ld16 ld19 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| ldlidar | 0.2.0 |
| ldlidar_component | 0.2.0 |
| ldlidar_node | 0.3.0 |
README
LD Lidar ROS 2 Package
ROS 2 package for LDRobot lidar - Based on Nav2 Lifecycle nodes
Get the Lidar • YouTube Videos • Install • Start the Node • Parameters • RViz2 • Robot Integration • Benchmarking
This package is designed to work with the DToF 2D Lidar sensors LD19 made by LDRobot.
It can work also with the LD06 model, but no tests have been performed with it. LD06 cannot work outdoor.
| LD19 | LD06 |
|---|---|
 |
 |
Get the lidar
My lidar (LD19) comes from the LDRobot kickstarter campaing ended in 2021.
LDRobot then created also an Indiegogo campaign for the LD19.
LDRobot today distributes the Lidar through third-party resellers:
- Waveshare: LD19
- Innomaker: LD06
- Other: Search on Google
The node in action
| LD19 Lifecycle | LD19 outdoor |
|---|---|
 |
 |
Install the node
The node is designed to work with
:pushpin: Note: ROS 2 Rolling is not yet supported because of the missing
nav2_utilsdependency
Clone the repository in your ROS2 workspace:
cd ~/ros2_ws/src/ #use your current ros2 workspace folder
git clone https://github.com/Myzhar/ldrobot-lidar-ros2.git
Add dependencies:
sudo apt install libudev-dev
Install the udev rules
cd ~/ros2_ws/src/ldrobot-lidar-ros2/scripts/
./create_udev_rules.sh
Build the packages:
cd ~/ros2_ws/
rosdep install --from-paths src --ignore-src -r -y
colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
Update the environment variables:
echo source $(pwd)/install/local_setup.bash >> ~/.bashrc
source ~/.bashrc
Start the node
Launch file with YAML parameters
The default values of the parameters of the node can be modified by editing the file ldlidar.yaml.
Open a terminal console and enter the following command to start the node with customized parameters:
ros2 launch ldlidar_node ldlidar_bringup.launch.py
The ldlidar_bringup.launch.py starts a ROS 2 Container, which loads the LDLidar Component as a plugin.
The ldlidar_bringup.launch.py script also starts a robot_state_publisher node that provides the static TF transform of the
LDLidar [ldlidar_base->ldlidar_link], and provides the ldlidar description in the /robot_description.
Lifecycle
The ldlidar node is based on the ROS2 lifecycle architecture, hence it starts in the UNCONFIGURED state.
To configure the node, load all the parameters, establish a connection, and activate the scan publisher, the lifecycle services must be called in sequence.
Open a new terminal console and enter the following command:
ros2 lifecycle set /ldlidar_node configure
If the node is correctly configured and the connection is established, Transitioning successful is returned. If there are errors, Transitioning failed is returned. Check the node log for details on any connection issues.
The node is now in the INACTIVE state, enter the following command to activate:
ros2 lifecycle set /ldlidar_node activate
The node is now activated and the /ldlidar_node/scan topic of type sensor_msgs/msg/LaserScan is available to be subscribed.
Launch file with YAML parameters and Lifecycle manager
Thanks to the Nav2 project, you can launch a lifecycle_manager node that handles the state transitions described above.
An example launch file, ldlidar_with_mgr.launch.py, demonstrates how to start the ldlidar_node with parameters loaded from the
ldlidar.yaml file. It also starts the lifecycle_manager, configured with the lifecycle_mgr.yaml file, to automatically manage the
lifecycle transitions:
ros2 launch ldlidar_node ldlidar_with_mgr.launch.py
The ldlidar_with_mgr.launch.py script automatically starts the ldlidar_node by including the ldlidar_bringup.launch.py launch file.
Parameters
Following the list of node parameters:
-
general.debug_mode: set totrueto activate debug messages -
comm.serial_port: the serial port path -
comm.baudrate: the serial port baudrate -
comm.timeout_msec: the serial communication timeout in milliseconds -
lidar.model: Lidar model [LDLiDAR_LD06, LDLiDAR_LD19, LDLiDAR_STL27L] -
lidar.rot_verse: The rotation verse. Use clockwise if the lidar is mounted upsidedown. [CW, CCW] -
lidar.units: distance measurement units [M, CM, MM] -
lidar.frame_id: TF frame name for the lidar -
lidar.bins: set to 0 for dinamic scan size according to rotation speed, set to a fixed value [e.g. 455] for compatibility with SLAM Toolbox -
lidar.range_min: minimum scan distance -
lidar.range_max: maximum scan distance -
lidar.enable_angle_crop: enable angle cropping -
lidar.angle_crop_min: minimum cropping angle -
lidar.angle_crop_max: maximum cropping angle
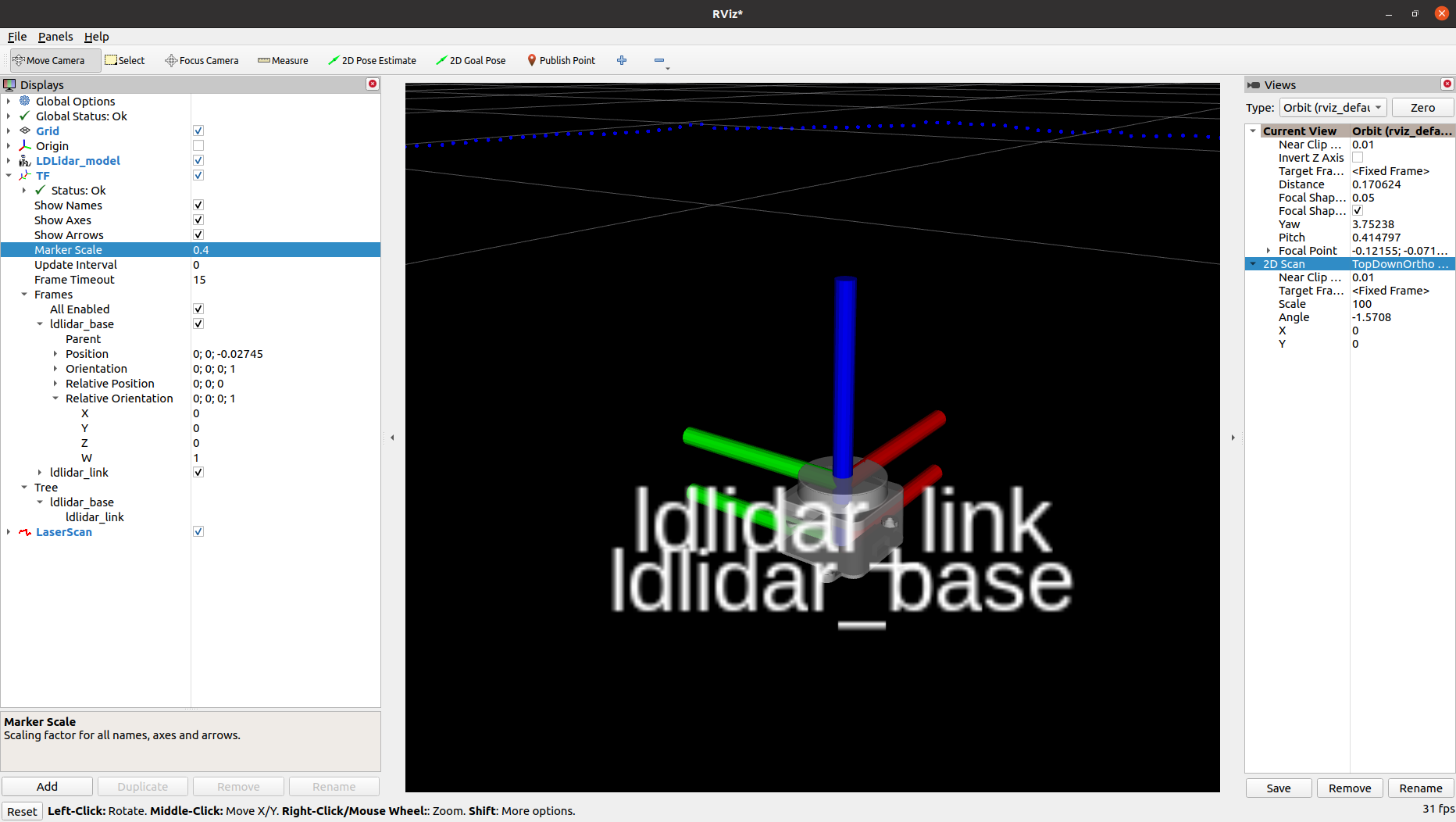
Display scan on RViz2
The launch file ldlidar_rviz2.launch.py starts the ldlidar_node node, the lifecycle_manager node, and a preconfigured instance of RViz2 to display the 2D laser scan provided by the LDRobot sensors. This is an example to demonstrate how to correctly setup RViz2 to be used with the ldlidar_node node.
Open a terminal console and enter the following command:
ros2 launch ldlidar_node ldlidar_rviz2.launch.py

Integrate the LDLidar sensor in your robot
Follow these steps to integrate the LDLidar sensor into your robot configuration:
-
Provide TF Transform: Ensure there is a TF transform from
base_linktoldlidar_base, positioned at the center of the lidar scanner base. Theldlidar_base->ldlidar_linktransform is provided by therobot_state_publisherstarted by theldlidar_bringup.launch.pylaunch file. -
Modify Configuration: Update the
ldlidar.yamlfile to match your robot’s configuration. -
Include Launch File: Add the
ldlidar_bringup.launch.pyto your robot’s bringup launch file. Refer to the example provided. -
Handle Lifecycle: Properly manage the node’s lifecycle. You can use the Nav2
lifecycle_managerby including it in your bringup launch file. Follow the example provided. -
Deploy and Test: Deploy your configuration and test the system to ensure everything is working correctly.
Enjoy your fully integrated lidar system!
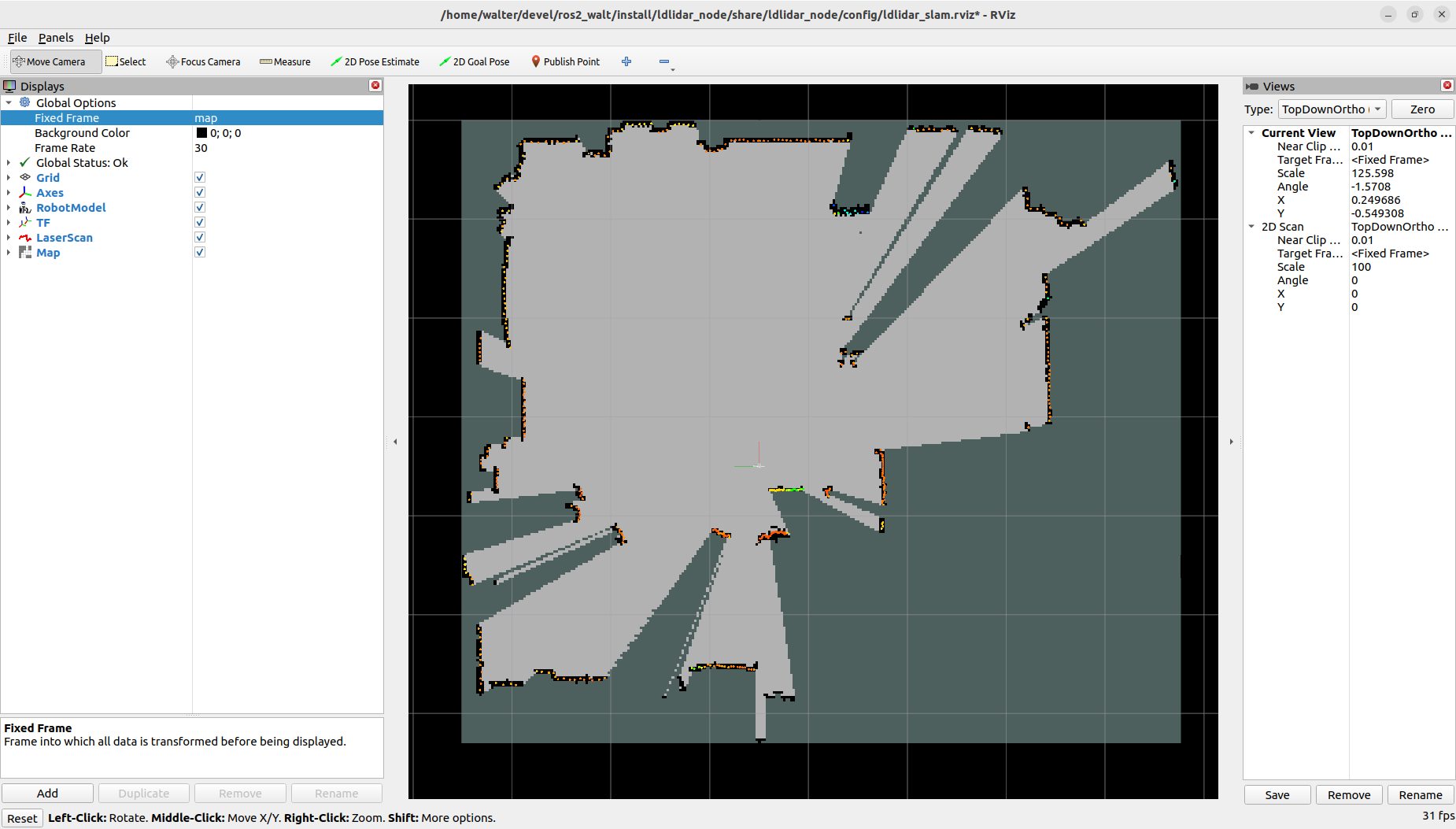
SLAM Toolbox example
The launch file ldlidar_slam.launch.py shows how to use the node with the SLAM Toolbox package to generate a 2D map for robot navigation.
Benchmarking
It is possible to benchmark the node to evaluate the overall performance by using the NVIDIA® ISAAC ROS ros2_benchmark package.
First of all install the ros2_benchmark package.
Launch the benchmark:
cd ~/ros2_ws/src/ldrobot-lidar-ros2/ldlidar_node/test/
launch_test ldlidar_benchmark.py
the final result should be similar to
+--------------------------------------------------------------------------------------------+
| LD Lidar Live Benchmark |
| Final Report |
+--------------------------------------------------------------------------------------------+
| [Scan] Delta between First & Last Received Frames (ms) : 4900.138 |
| [Scan] Mean Playback Frame Rate (fps) : 9.936 |
| [Scan] Mean Frame Rate (fps) : 9.936 |
| [Scan] # of Missed Frames : 0.000 |
| [Scan] # of Frames Sent : 49.000 |
| [Scan] First Sent to First Received Latency (ms) : 0.075 |
| [Scan] Last Sent to Last Received Latency (ms) : 0.113 |
| [Scan] First Frame End-to-end Latency (ms) : 0.075 |
| [Scan] Last Frame End-to-end Latency (ms) : 0.113 |
| [Scan] Max. End-to-End Latency (ms) : 0.172 |
| [Scan] Min. End-to-End Latency (ms) : 0.049 |
| [Scan] Mean End-to-End Latency (ms) : 0.098 |
| [Scan] Max. Frame-to-Frame Jitter (ms) : 100.142 |
| [Scan] Min. Frame-to-Frame Jitter (ms) : 0.000 |
| [Scan] Mean Frame-to-Frame Jitter (ms) : 17.865 |
| [Scan] Frame-to-Frame Jitter Std. Deviation (ms) : 12.793 |
+--------------------------------------------------------------------------------------------+
| Baseline Overall CPU Utilization (%) : 0.000 |
| Max. Overall CPU Utilization (%) : 79.167 |
| Min. Overall CPU Utilization (%) : 0.000 |
| Mean Overall CPU Utilization (%) : 1.179 |
| Std Dev Overall CPU Utilization (%) : 3.964 |
+--------------------------------------------------------------------------------------------+
| [metadata] Test Name : LD Lidar Live Benchmark |
| [metadata] Test File Path : /home/walter/devel/ros2/ros2_walt/src/ldrobot-lidar-ros2/ldlidar_node/test/ldlidar_benchmark.py |
| [metadata] Test Datetime : 2024-11-25T22:12:54Z |
| [metadata] Device Hostname : walter-Legion-5-15ACH6H |
| [metadata] Device Architecture : x86_64 |
| [metadata] Device OS : Linux 6.8.0-40-generic #40~22.04.3-Ubuntu SMP PREEMPT_DYNAMIC Tue Jul 30 17:30:19 UTC 2 |
| [metadata] Idle System CPU Util. (%) : 0.333 |
| [metadata] Benchmark Mode : 3 |
+--------------------------------------------------------------------------------------------+
CONTRIBUTING
Submitting your code changes
Code contributions should be made via pull requests to the appropriate repository:
As a contributor please follow the practices explained in ROS2 documentation.
Before submitting a pull request please perform this list of tasks from the root of your ROS2 workspace:
-
Automatic code formatting:
$ ament_uncrustify --reformat src -
Build the packages to check for compile errors:
$ colcon build --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release -
Perform the automatic build tests:
$ colcon test -
Analyze and solve eventually reported errors:
$ colcon test-result --verbose -
Repeat steps (1) -> (4) until all reported formatting errors have been resolved.
License
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Contributors must sign-off each commit by adding a Signed-off-by: ...
line to commit messages to certify that they have the right to submit
the code they are contributing to the project according to the
Developer Certificate of Origin (DCO).