
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 coordinator detection ma2010_robotiq_moveit_config ma2010_server motoman motoman_driver motoman_ma2010_moveit_config motoman_ma2010_support motoman_msgs motoman_resources gripper_server robotiq_2f_140_gripper_visualization robotiq_2f_85_gripper_visualization robotiq_2f_gripper_control robotiq_2f_gripper_msgs robotiq_modbus_rtu cv_bridge image_geometry vision_opencv |
|
|
Repository Summary
| Description | 安川MA2010 + Robotiq2F-140 + RealSense 视觉抓取 |
| Checkout URI | https://github.com/ryanreadbooks/motoman_robotiq_grasping.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-05 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | ros vision moveit motoman robotiq grasping realsense-camera ma2010 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| coordinator | 0.0.0 |
| detection | 0.0.0 |
| ma2010_robotiq_moveit_config | 0.3.0 |
| ma2010_server | 0.0.0 |
| motoman | 0.3.5 |
| motoman_driver | 0.3.5 |
| motoman_ma2010_moveit_config | 0.3.0 |
| motoman_ma2010_support | 0.3.5 |
| motoman_msgs | 0.3.5 |
| motoman_resources | 0.3.5 |
| gripper_server | 0.0.0 |
| robotiq_2f_140_gripper_visualization | 1.0.0 |
| robotiq_2f_85_gripper_visualization | 1.0.0 |
| robotiq_2f_gripper_control | 0.0.3 |
| robotiq_2f_gripper_msgs | 0.0.2 |
| robotiq_modbus_rtu | 1.0.0 |
| cv_bridge | 1.12.8 |
| image_geometry | 1.12.8 |
| vision_opencv | 1.12.8 |
README
安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
功能:在ROS平台上,使用realsense相机引导安川MA2010机械臂用Robotiq 2F-140夹爪进行抓取
- 安川MA2010机械臂 + Robotiq 2F-140 + RealSense 视觉抓取
0. 操作注意事项
本仓库实现的所有系统功能仅为实验性质,并未考虑机械臂运动的安全性问题,因此操作的时候必须十分注意机械臂的动作情况,以免与人或物发生碰撞。
因此建议操作过程中要护住示教器上的急停按钮,以免发生意外。
1. 前提条件
1.1. 软件条件
系统:Ubuntu16.04 + ROS kinetic
语言:Python3.7 + CPP
1.2. 硬件条件
机械臂:安川MA2010机械臂
相机:Intel RealSense D435i
二指夹持器:Robotiq 2F-140
其它:双绞线、USB线、万用表等
2. 软件安装
2.1. 前置软件条件
- 安装ROS
# 包括ros-controller
sudo apt-get install ros-kinetic-ros-control
sudo apt-get install ros-kinetic-ros-controllers
sudo apt-get install ros-kinetic-moveit
-
安装realsense-ros(使用的是ROS1)
- realsense2_camera(相机发布图像话题)
- realsense2-description(包含相机urdf模型)
2.2. 硬件驱动
- 安川机械臂机械臂驱动使用ros-industrial/motoman,本仓库删除了一些无关的内容,仅保留ma2010_support;
- 机械臂的下位程序需提前下载到控制柜,参考官方文档。
- Robotiq 2F-140使用Danfoa/robotiq_2finger_grippers的代码进行驱动,对某些部分进行修改并集成在本仓库中。
2.3. 安装本仓库
- 创建工作空间
mkdir demo_ws
- 将项目clone下来并初始化工作空间
cd demo_ws
git clone --recursive https://github.com/ryanreadbooks/motoman_robotiq_grasping.git src
cd src && catkin_init_workspace
- 相关依赖的安装
cd ..
rosdep install --from-paths src --ignore-src -y -r
- 使用catkin build编译
# 由于项目使用python3,所以需要指定python3路径进行编译,向下面这样,如果你是其它路径,则替换下面三个路径
# /path/to/your路径一般来说是你的python3安装路径
# 分别在bin、include、lib三个子目录中,找到python、python3.Xm、libpython3.Xm.so三个文件 (3.X为python的版本)
catkin config -DPYTHON_EXECUTABLE=/path/to/your/bin/python
-DPYTHON_INCLUDE_DIR=/path/to/your/include/python3.7m
-DPYTHON_LIBRARY=/path/to/your/lib/libpython3.7m.so
# 指定不进行安装
catkin config --no-install
# 用catkin build进行编译
catkin build -DSETUPTOOLS_DEB_LAYOUT=OFF
# (可以额外指定一些其它的编译选项,比如:-DCMAKE_BUILD_TYPE=Debug或Release -DCATKIN_ENABLE_TESTING=OFF)
# 激活
source devel/setup.bash
- 安装
requirements.txt文件中有需要用到的py第三方依赖。(根据自己的需求选择性安装)
pip install -r requirements.txt
3. 安川驱动测试
确保电脑已经通过网线连接上机械臂控制柜内的网口
- 确保电脑的ip和机械臂控制柜的ip是在同一个局域网网段内;
- 用
ping命令确保两者连接正常。
3.1. 官方的功能包测试
💡注意:用官方的提供的功能包
motoman_ma2010_moveit_config是不带夹爪的。
ros-industrial/motoman的ma2010测试按照官方文档进行。
需要先将 robot_description和 controller_joint_names载入参数服务器(官方文档中的2.1 Joint Naming),然后再运行 robot_interface_streaming_YYYY节点(官方文档中的 2 Usage)。
💡注意:可以通过手动调用机械臂的使能(有一个/robot_enable的服务)来判断是否连通,同时可以查看关节状态(joint_states)判断是否ROS已经连接上机械臂。
rosservice call /robot_enable # 手动使能
rostopic echo joint_states # 查看关节角是否有数据
3.2. 用带有robotiq夹爪的机械臂测试
使用 robot_ip 参数运行下面的launch文件,该文件会调起所有所需的节点。robot_ip根据机器人设置的实际ip填写。
roslaunch ma2010_robotiq_moveit_config moveit_planning_execution.launch robot_ip:=192.168.255.1
启动后,会出现rviz窗口,可以在rviz中用鼠标规划机械臂的运动。
💡注意:规划完并且点击execute前,确保机械臂已经开启使能,可以通过调用服务 rosservice call /robot_enable 完成使能的开启。
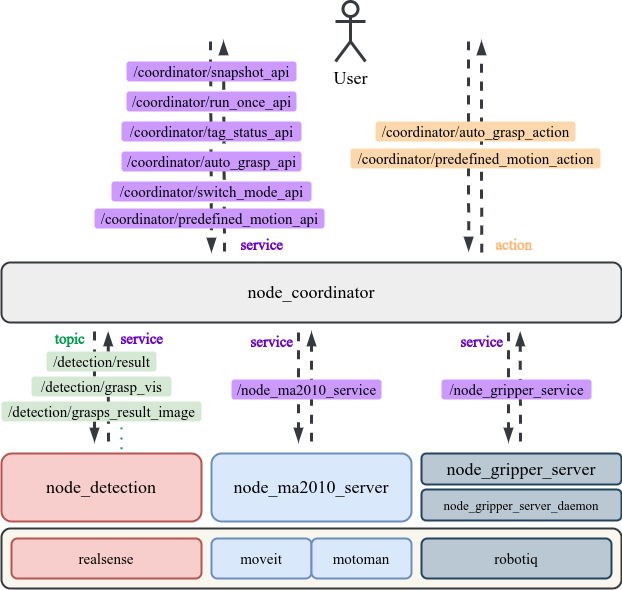
4. 各节点功能介绍
4.1. Robotiq夹爪功能
- 确保夹爪通过USB连接到电脑,然后执行下面的命令
sudo adduser <YOUR_USERNAME> dialout
sudo chmod 777 /dev/ttyUSB0 # 修改/dev/ttyUSB0为具体连接的USB口
- 启动夹爪控制服务节点
roslaunch gripper_server bringup_gripper_server.launch
- 通过
rosservice call命令调用服务/node_gripper_service,指定请求码等参数
rosservice call /node_gripper_service "{reqcode: 2000, position: 0.10, speed: 0.5, force: 1.0, comment: ''}"
reqcode说明:
ReqGripperManualAction = 2000 # 手动动作,指定宽度、速度、力
ReqGripperOpen = 2001 # 简单一个open动作
ReqGripperClose = 2002 # 简单一个close动作
ReqGripperStop = 2003 # 夹爪停止
ReqGripperERelease = 2004 # 紧急释放夹爪
ReqGetGripperState = 2005 # 获取夹爪当前的状态
ReqGripperDebug = 2010 # 调试功能
参数说明:
reqcode 请求码
position 夹爪的目标宽度,单位m
speed 指定动作的速度
force 指定力的大小
comment 备注
4.2. MA2010 Server功能
- 启动ma2010_server节点
roslaunch ma2010_server bringup_ma2010_server.launch
- 通过
rosservice call命令调用服务/node_ma2010_service,指定请求码等参数
reqcode说明:
ReqGoHome = 3000 # 回到原点
ReqGoDest = 3010 # 前往预设定目标位置
ReqGoUp = 3011 # 机械臂仅在z轴方向提升预设距离
ReqGoDown = 3012 # 机械臂仅在z轴方向下降预设距离
ReqGoDetectionOrigin = 3020 # 前往检测位置
ReqGoDetectionOrigin2 = 3021 # 前往2号检测位置
ReqGoCustom = 3030 # 前往用户指定目标位置
ReqGoCustomWithPre = 3031 # 在前往指定位置前,会先前往一个预先的姿态点
ReqGetCurPose = 3040 # 获取当前机械臂的末端位姿
ReqGetCurJoints = 3050 # 获取当前机械臂的所有关节角度
rescode响应码:
ResOK = 200; # success
ResFail = 400; # failure
4.3. Coordinator功能
coordinator节点有调试模式和自动运行模式,调试模式只能手动触发一次运行,自动模式可以指定需要抓取多少个物体和最多尝试多少次抓取。
可以在启动coordinator节点时指定使用调试模式还是自动模式
roslaunch coordinator bringup_coordinator.launch debug:=true # 调试模式
roslaunch coordinator bringup_coordinator.launch debug:=false # 自动模式
4.3.1. debug模式
Coordinator默认就在debug模式,可以通过服务 /coordinator/switch_mode_api进行切换
# 切换调试模式
rosservice call /coordinator/switch_mode_api "data: true"
4.3.1.1. 执行一次抓取
# 执行一次抓取
rosservice call /coordinator/run_once_api "{}"
4.3.1.2. 控制机械臂只前往目标抓取点而不执行抓取操作
# 在参数服务器中设置一个参数即可
rosparam set /coordinator/debug/perform_grasp false
# 如果想要重新执行抓取,则只将这个参数设置成true即可
# 注意:这个参数仅在调试模式下生效
4.3.1.3. 获取抓取位姿的快照
# 记录当前时刻的一个抓取位姿快照
# 如果记录有快照,则执行抓取的时候优先选择位姿快照执行抓取动作
rosservice call /coordinator/snapshot_api "{}"
4.3.2. auto模式
💡注意:auto模式机械臂自动运行,在自动运行过程中,必须时刻关注机械臂的运动状态,避免发生碰撞事故。
4.3.2.1. 自动抓取
切换到自动模式后,才可以实现对多个物体的自动抓取
# 切换自动模式
rosservice call /coordinator/switch_mode_api "data: false"
通过服务 /coordinator/auto_grasp_api可以在自动模式下开启和关闭自动抓取流程
n_object指定一共需要抓取多少个物体 ;max_attempts指定最多尝试多少次抓取;data有两个选择,on表示开始,off表示停止
开始自动抓取
rosservice call /coordinator/auto_grasp_api "n_object: 4
max_attempts: 6
data: 'on'"
停止自动抓取
# 此时n_object和max_attempts无影响
# 调用服务后,等待正在进行的抓取完成后会停下
rosservice call /coordinator/auto_grasp_api "n_object: 4
max_attempts: 6
data: 'off'"
4.3.2.2. 预定义动作
定义:类似于机械臂的示教功能,可以预先定义一系列需要机械臂指定的动作,比如先移动到某个位姿,然后再移动到另一个位姿。预定义动作功能可以实现简单的一连串动作。
为了使用预定义动作这个功能,需要自己编写一个预动作文件,并且调用/coordinator/predefined_motion_api服务接口,如下所示:
rosservice call /coordinator/predefined_motion_api "filename: 'test.motion'
data: 'on'"
# 注意:filename指明在coordinator/repository目录下的预动作文件的名字
# data=on表示开始预定义动作的执行,data=off表示停止当前预定义动作的执行。
在预动作文件中,每一行表示一个动作命令,文件必须以CMDSTART作为第一行,以CMDEND作为最后一行。支持的动作命令如下:
-
CMDSTART:预动作文件开头 -
CMDEND:预动作文件结尾 -
MOVETO- 作用:将机械臂移动到某个位置
- 语法:
MOVETO POSITION -
POSITION表示移动目标,这个目标可以为内置的目标,也可以是已经存在的状态的名字。(见状态记录) - 其中支持两个内置目标:
DetectionOrigin和Destination
-
PAUSEFOR- 作用:停止一段时间
- 语法:
PAUSEFOR MILLSECONDS -
MILLSECONDS的单位为毫秒
-
GRASPOPEN- 作用:打开夹持器
-
GRASPCLOSE- 作用:关闭夹持器
-
LIFTUP- 作用:机械臂在z轴方向上升固定距离
一个示例的预动作文件为:
CMDSTART
MOVETO DetectionOrigin
PAUSEFOR 300
GRASPOPEN
PAUSEFOR 100
GRASPCLOSE
PAUSEFOR 100
LIFTUP
MOVETO Destination
GRASPOPEN
MOVETO DetectionOrigin
CMDEND
4.3.3. 状态记录
状态记录功能既可以在debug模式也可以在auto模式下使用,可以使用状态记录动能记录下当前机械臂的状态,从而可以后续使用。
记录下来的状态保存在了coordinator/repository/predefined.status.bin文件中。
rosservice call /coordinator/tag_status_api "opcode: 8000
name: '自定义状态的名字'"
# 注意:name不能为Destination或者DetectionOrigin,因为这两个是内置的保留关键字
opcode指定了对状态所需要实施的操作,支持的操作有3中,它们为:
TAG_SERVICE_ADD = 8000 # 添加新的状态
TAG_SERVICE_DEL = 8010 # 删除已有的状态
TAG_SERVICE_QUERY = 8020 # 查询已有的状态
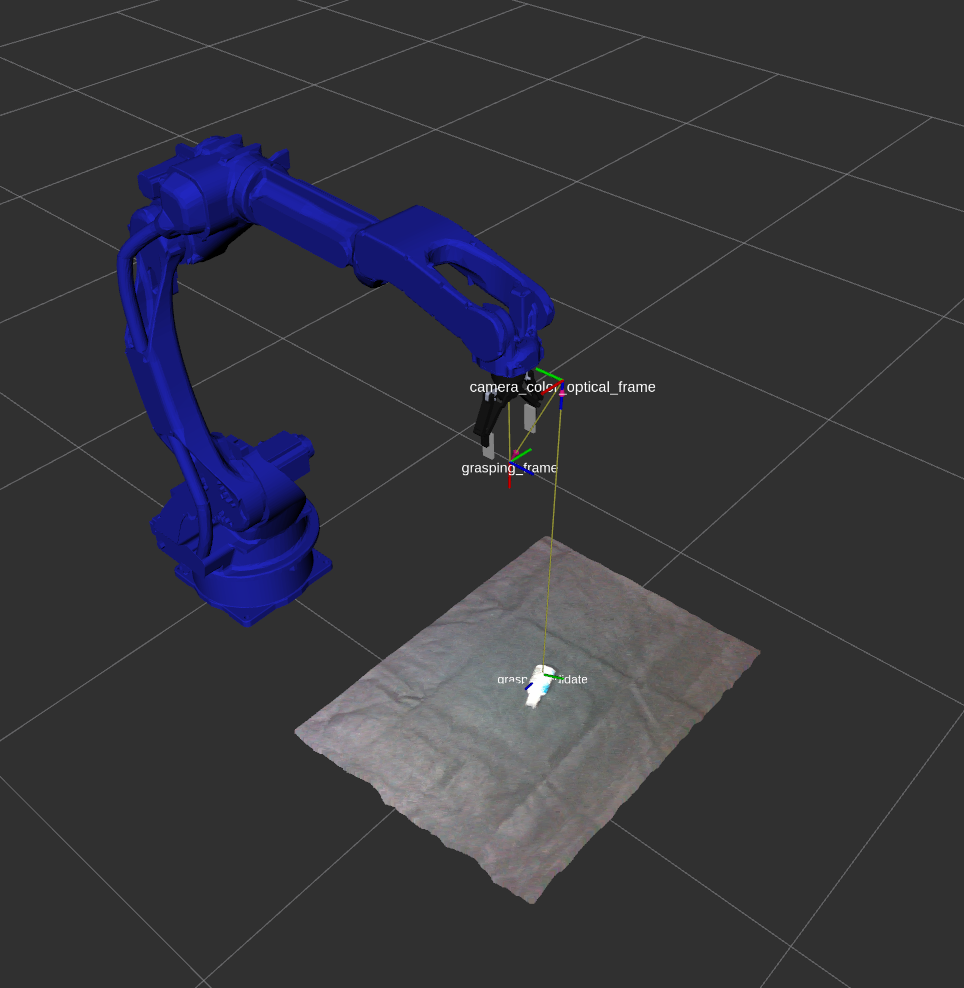
4.4. 检测功能
启动检测节点
可以选择多种检测方法进行抓取姿态检测(一次只能选择一种)
roslaunch detection bringup_detection.launch planar:=true # 启动平面抓取检测
# or
roslaunch detection bringup_detection.launch planar_grconv:=true # 启动GRConvNet平面抓取检测
# or
roslaunch detection bringup_detection.launch gn1b:=true # 启动GN1B方法进行6D抓取检测
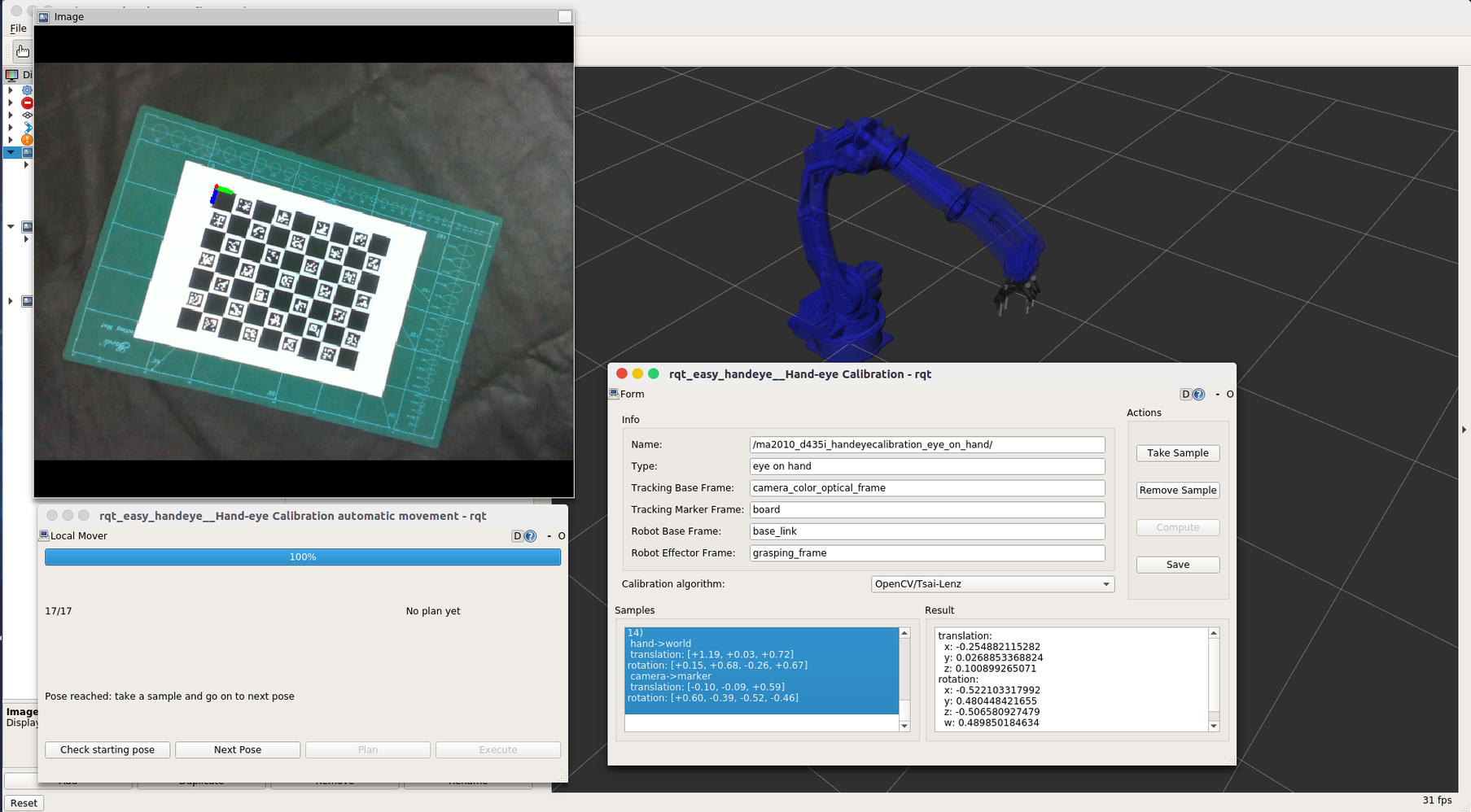
5. 眼在手上标定
眼在手上标定在 Docker中进行,镜像下载地址。需要提前下载安装好Docker和nvidia-docker。
- 启动镜像
chmod +x ./docker_run.bash
./docker_run.bash
-
进入容器后,本仓库的代码所在路径为:
/codes/demo_ws -
git checkout calibration命令切换到分支
cd /codes/demo_ws
source devel/setup.bash
# 连接上机械臂、相机,启动下面三个launch文件
roslaunch ma2010_server bringup_ma2010_server.launch
roslaunch easy_aruco track_charuco_board.launch
roslaunch easy_handeye bringup_calibrate.launch
💡注意:若要在Docker中启动多个终端,在本机终端中使用 docker exec -it CONTAINER_NAME /bin/bash 即可进入,进入后需要再次source环境变量
# 本机终端执行
docker exec -it CONTAINER_NAME /bin/bash # CONTAINER_NAME为跑起来后容器的名称,可以通过docker ps查看
# 执行完上面这句话后,就会进入到容器里面了,再执行下面的source环境变量
source /etc/profile
- 可以手动操作开始进行标定。参考easy_handeye
效果图如下:
致谢/参考资料
CONTRIBUTING
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|
|
|
motoman_robotiq_grasping repositoryros vision moveit motoman robotiq grasping realsense-camera ma2010 |
|
|