
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner grid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization husky_simulation prm_apf_planner |
|
|
Repository Summary
| Description | Probabilistic Road Map mixed Artificial Potential Field Path Planning for Non-Holonomic Robots |
| Checkout URI | https://github.com/prat1kbhujbal/prm-blended-potential-field-path-planning.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-11-12 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | path-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| grid_map | 1.6.4 |
| grid_map_core | 1.6.4 |
| grid_map_costmap_2d | 1.6.4 |
| grid_map_cv | 1.6.4 |
| grid_map_demos | 1.6.4 |
| grid_map_filters | 1.6.4 |
| grid_map_loader | 1.6.4 |
| grid_map_msgs | 1.6.4 |
| grid_map_octomap | 1.6.4 |
| grid_map_pcl | 1.6.4 |
| grid_map_ros | 1.6.4 |
| grid_map_rviz_plugin | 1.6.4 |
| grid_map_sdf | 1.6.4 |
| grid_map_visualization | 1.6.4 |
| husky_simulation | 0.0.0 |
| prm_apf_planner | 0.0.0 |
README
Probabilistic Road Map mixed Artificial Potential Field Path Planning
Overview
Probabilistic roadmap (PRM) algorithm generates graphs to perform path planning with complex constraints and high dimensions but has some limitations in situations like narrow pathways and environments with dynamic obstacles. This drawback of PRM is usually solved by increasing the number of randomly generated sampling points. However, too many sampling points will increase the computational complexity resulting in poor performance. Hence to overcome these limitations PRM with potential fields can be implemented. Potential field can be generated for the workspace, will help determine the complexity of workspace and adequate number of sampling points required, and then ensure high density of sampling points around the obstacles by implementing a regional sampling strategy.
Distribution of Sampling points using Adaptive solution:
1) Calculate Repulsive potential for each point q in the map generated by obstacle qo. 2) Determine Number of Sampling Points. 3) Using bounding range for open area and obstacle region sampling point can be distributed in the map.
Dependencies
- Ubuntu18
- ROS Melodic
- python3.x
- NumPy
- cv2
- panda
- Matplotlib
- sklearn
- shapely
Steps to run the code
Build and Install ROS dependencies
cd <your_workspace>/src
git clone https://github.com/Prat33k-dev/PRM-Blended-Potential-Field-Path-Planning.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make
Genrate path coordinates file
First need to genrate .csv file of path coordinates to follow from start to goal location.
cd <your_workspace>/src/PRM-Blended-Potential-Field-Path-Planning/prm_apf_planner
python3 src/main.py --start 6 1 --goal 19 19 --FilePath './map/map.png'
Parameters
- start - Start position of the robot. Default :- [6 1]
- goal - Goal position of the robot. Default :- [19 19]
- FilePath - map file path. Default :- ‘./map/map.png’
Run the simulation
cd <your_workspace>
source /devel/setup.bash
roslaunch prm_apf_planner simulation.launch
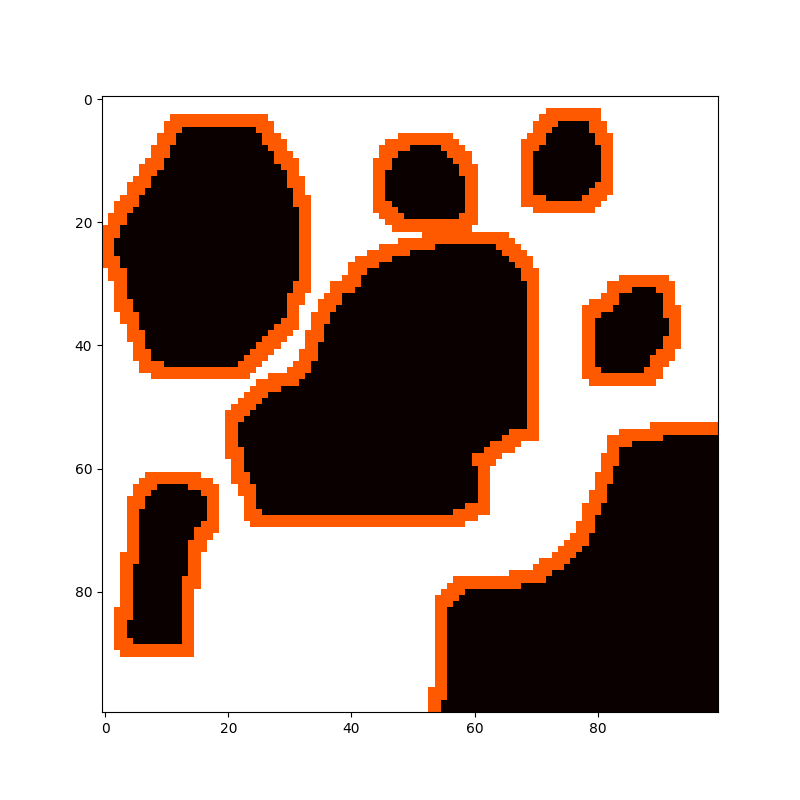
Results
Environment| Occupancy Map
:-:|:-:
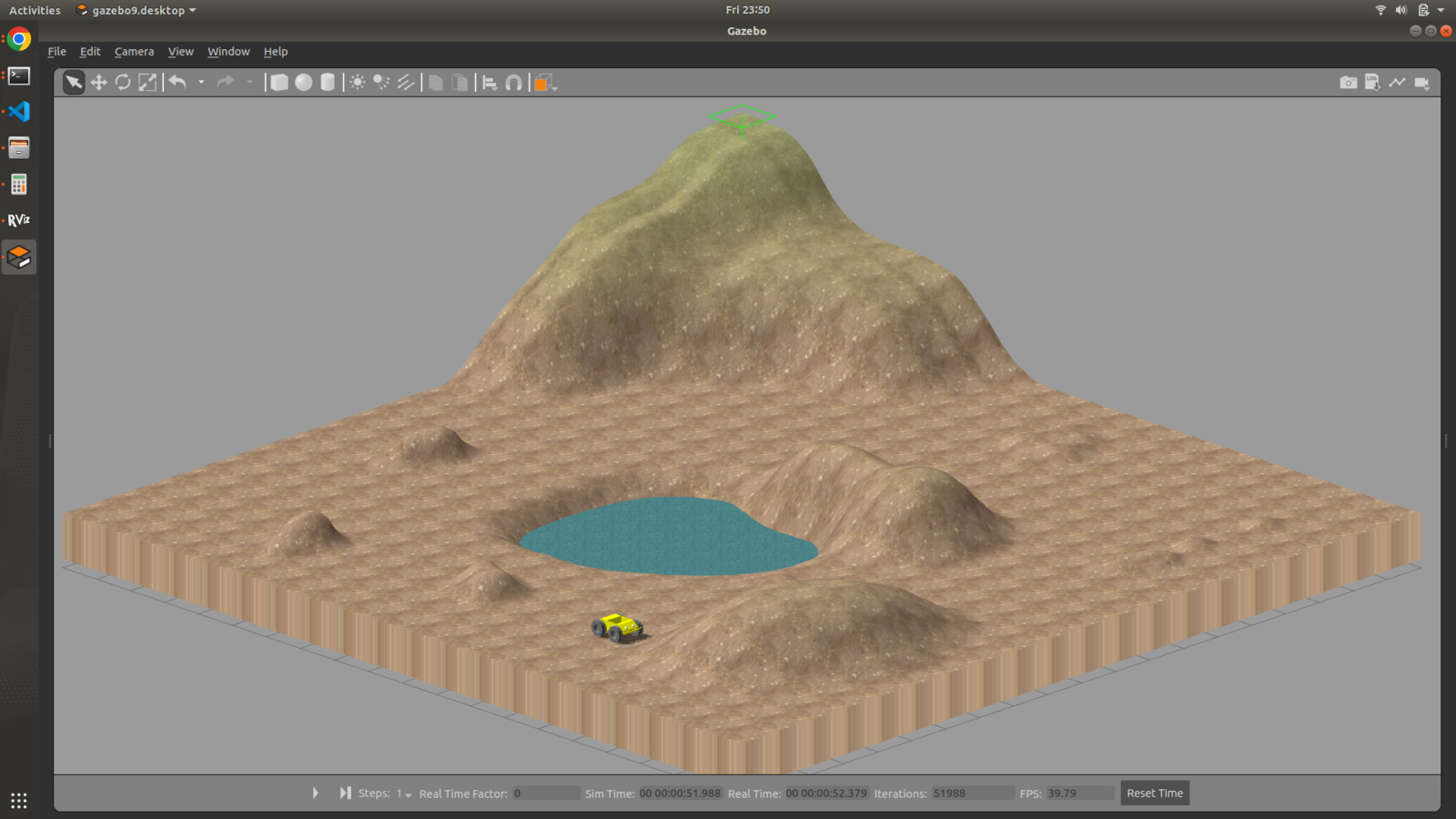 |
| 
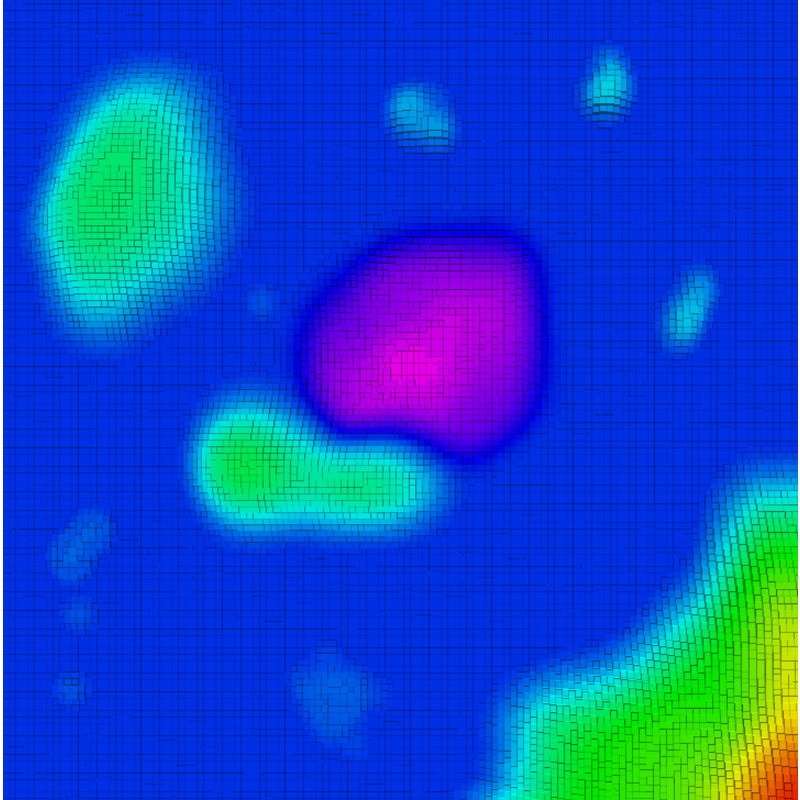
Potential field
Around the Obstacle | Heatmap
:-:|:-:
 |
| 
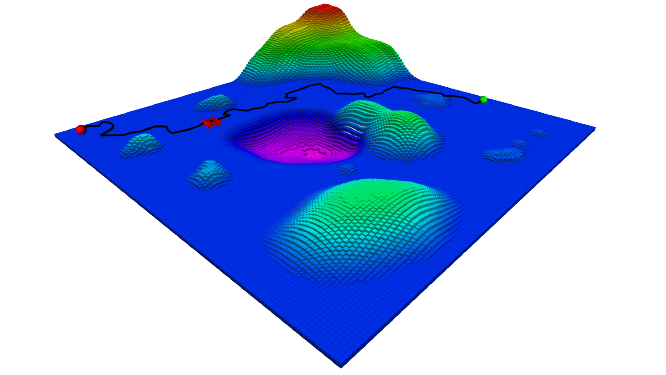
Path planned by PRM-APF blend

Demonstration
Authors
- Pratik Bhujbal GitHub
- Maaruf Vazifdar GitHub
Refrences
[1] H. You, G. Chen, Q. Jia and Z. Huang, “Path Planning for Robot in Multi- dimensional Environment Based on Dynamic PRM Blended Potential Field,” 2021 IEEE 5th Information Technology,Networking,Electronic and Automation Control Conference (ITNEC), 2021, pp. 1157-1162, doi: 10.1109/ITNEC52019.2021.9586848. (Link)
[2] P. Fankhauser and M. Hutter, “A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation”, in Robot Operating System (ROS) – The Complete Reference (Volume 1), A. Koubaa (Ed.), Springer, 2016. (Link)
[3] https://www.cs.cmu.edu/~motionplanning/lecture/Chap4-Potential-Field_howie.pdf.
CONTRIBUTING
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|
|
|
prm-blended-potential-field-path-planning repositorypath-planning potential-fields husky rviz gridmap gazebo-simulator ros-melodic artificial-potential-field prm-planner |
|
|