
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
Repository Summary
| Description | |
| Checkout URI | https://github.com/shineminxing/ros2go2estimator.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-22 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| dds_rostopic | 0.0.0 |
| fusion_estimator | 0.0.0 |
| message_handle | 0.0.0 |
| sport_control | 0.0.0 |
README
Ros2Go2Estimator 🦾
![]()
- 一种高精度里程计解决方案,
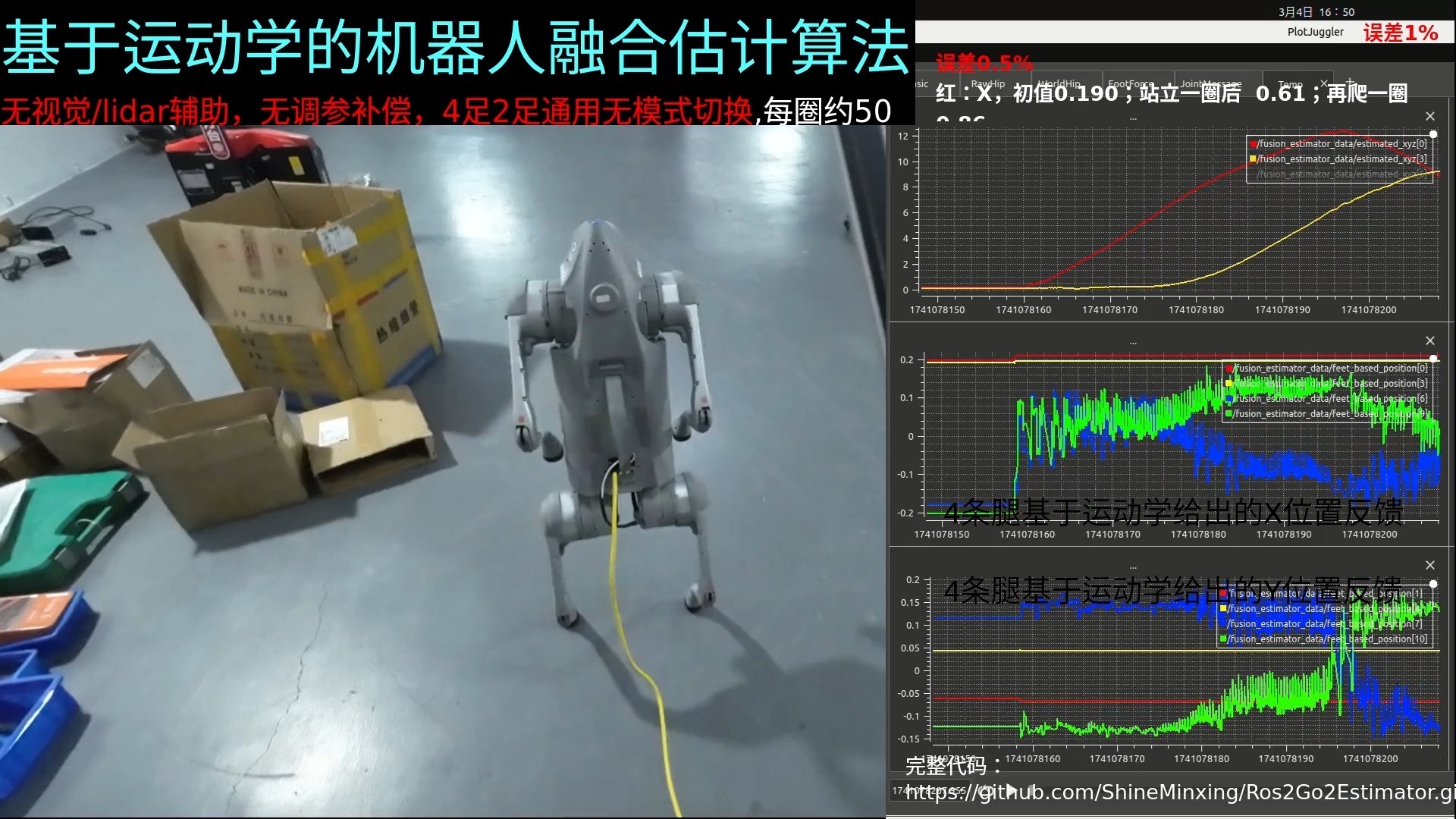
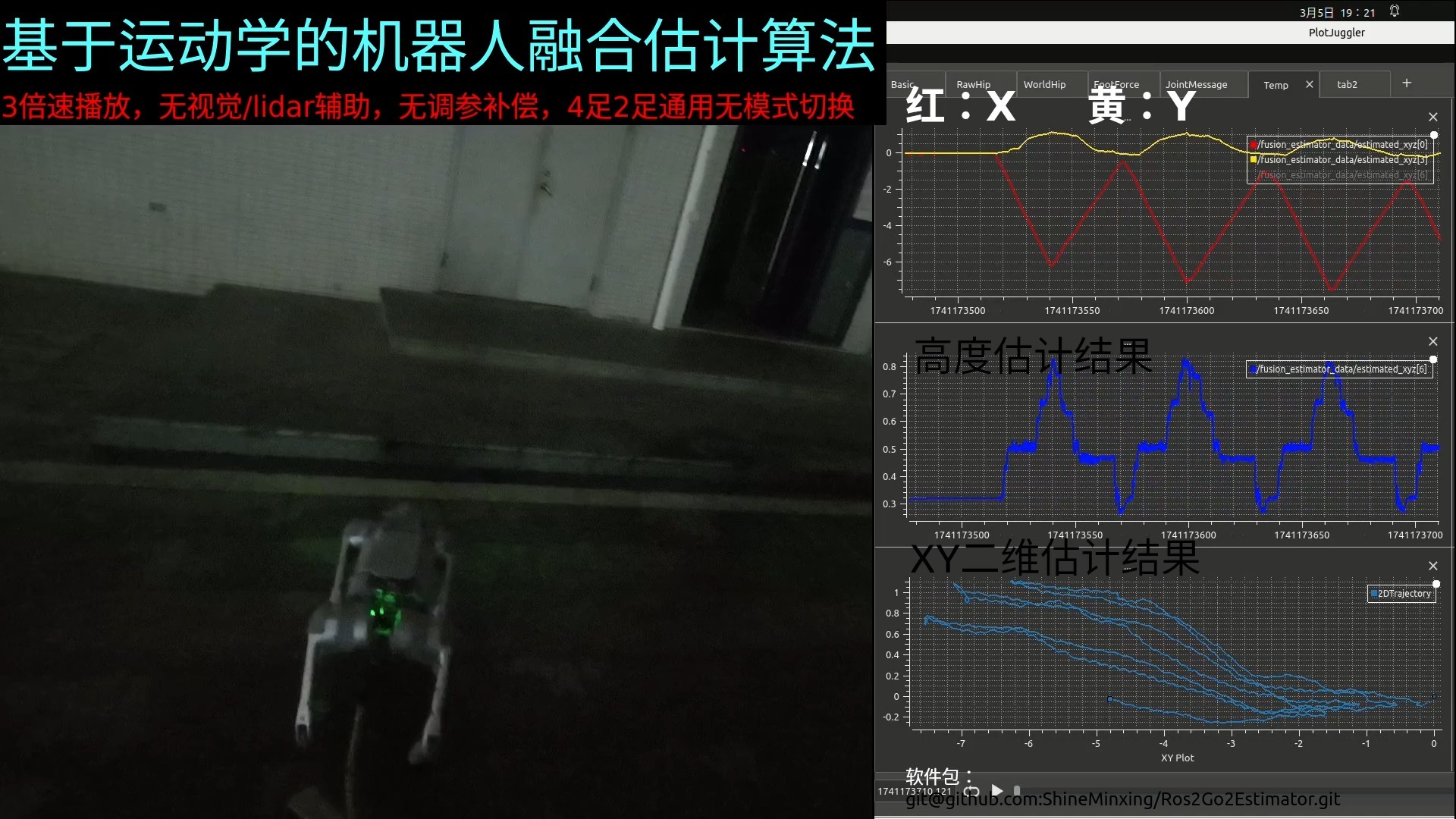
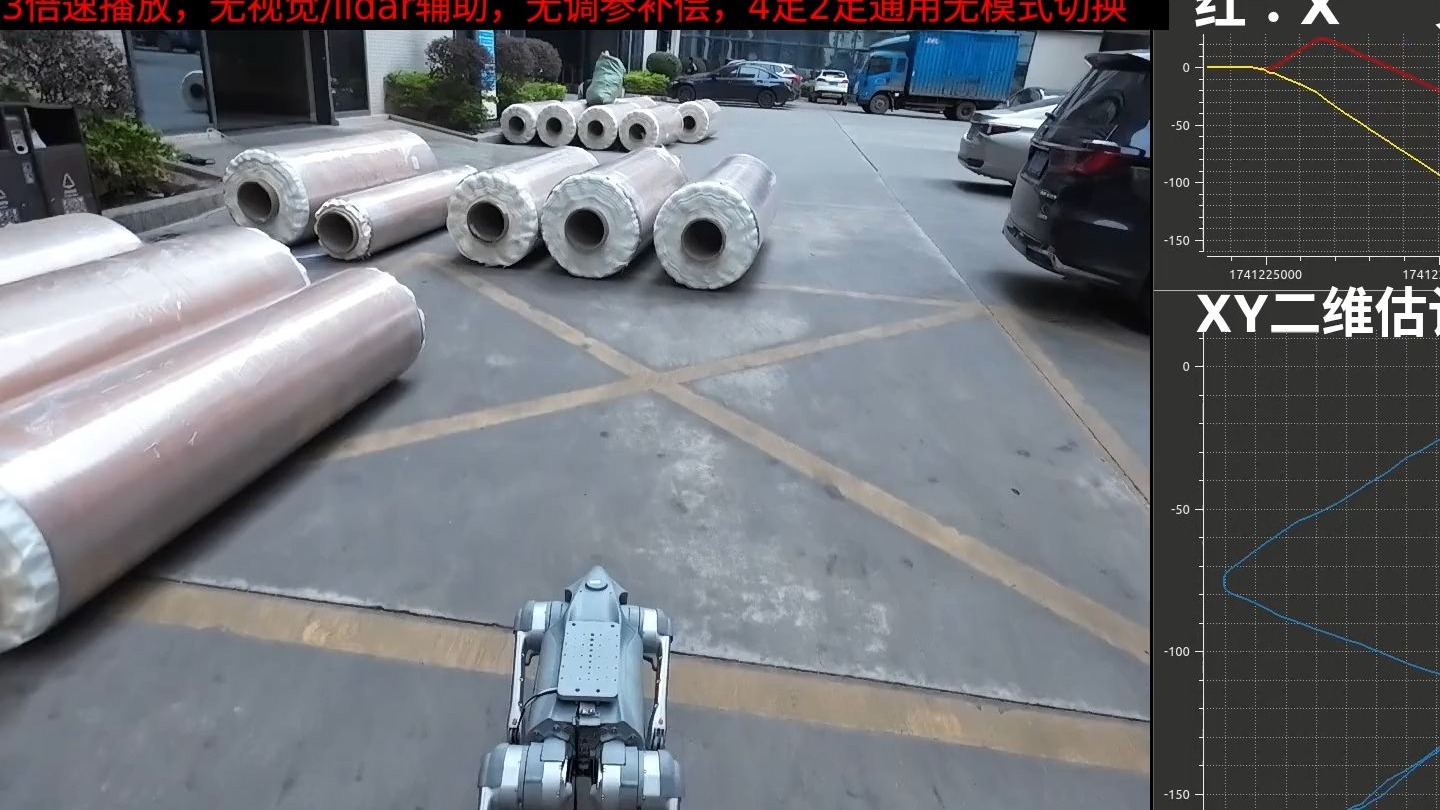
- 基于纯运动学的双足/四足机器人位置估计算法,目前仅使用IMU、足压力传感器、关节角度和角速度,不依赖相机或Lidar,但可将信号融合进去,进一步提高估计精度;
- 使用config.yaml进行话题名称设置.
📚 补充说明
- 切换两足、四足无需在估计器内做模式切换;
- 目前没有调整参数做补偿,工程使用时可进一步提升精度;
- dds_rostopic包将宇树dds提供的信息转换和发布为标准ros2话题;
- fusion_estimator包发布对应“base_link”的话题SMX/Odom和对应“base_link_2D”的话题SMX/Odom_2D;
- message_handle包完成SMX/Odom和SMX/Odom_2D的tf,此外,将frame“utlidar_lidar”的pointcloud2转换为“base_link_2D”话题SMX/Scan;
- sport_control包读取joystick输入和其他指令,使用unitree_sdk2提供的接口控制机器狗;
- 使用SLAM Toolbox建图时额外ros2 launch sport_control slam_launch.py;
- 使用Nav2导航时额外ros2 launch sport_control nav_launch.py;
- 使用Amov机架跟踪时额外ros2 launch sport_control g1_launch.py;
- SLAM Toolbox目前是纯里程计建图,请擅长SLAM的同志自行把地图匹配加进去;
- Nav2同样请自行调整,加载的地图记得改成自己的;
- 也适用于Ubuntu20.04 foxy系统,把apt install的软件改为-foxy-即可;
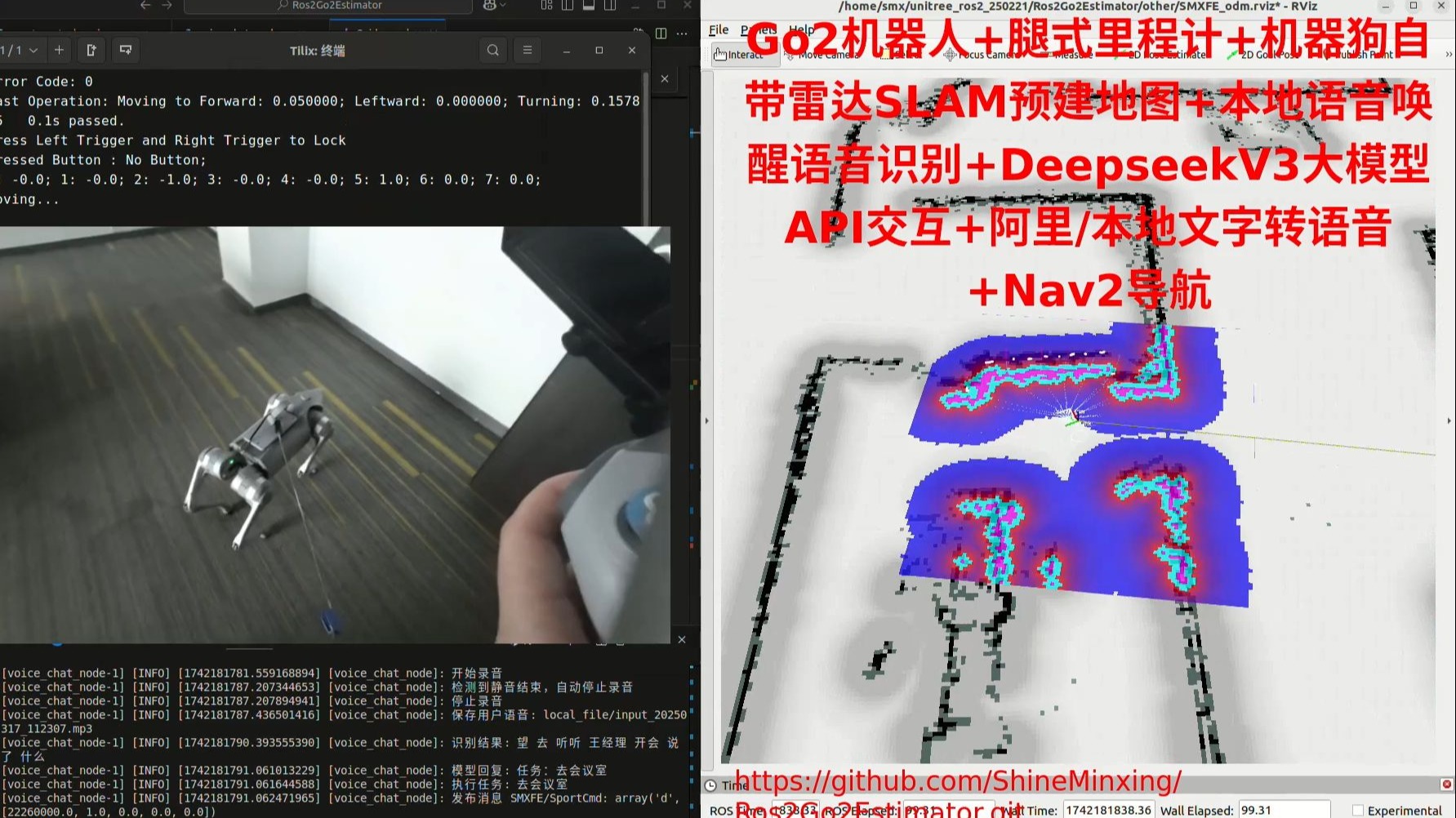
🎥 视频演示
最新进展(点击图片进入视频)
纯里程计站立/四足切换建图效果
实验记录
-
站立行走误差1%,四足行走误差0.5%
-
爬楼梯高度误差小于5cm
-
长距离测试,受磁场变化影响,380米运动偏差3.3%
- 语音控制机器狗,实现意图猜测和在预建地图导航。比如说“没有纸张了”,自动执行导航‘去仓库’
- 额外安装https://github.com/ShineMinxing/Ros2Chat
- 机器狗与吊舱的协同光点/人脸跟踪
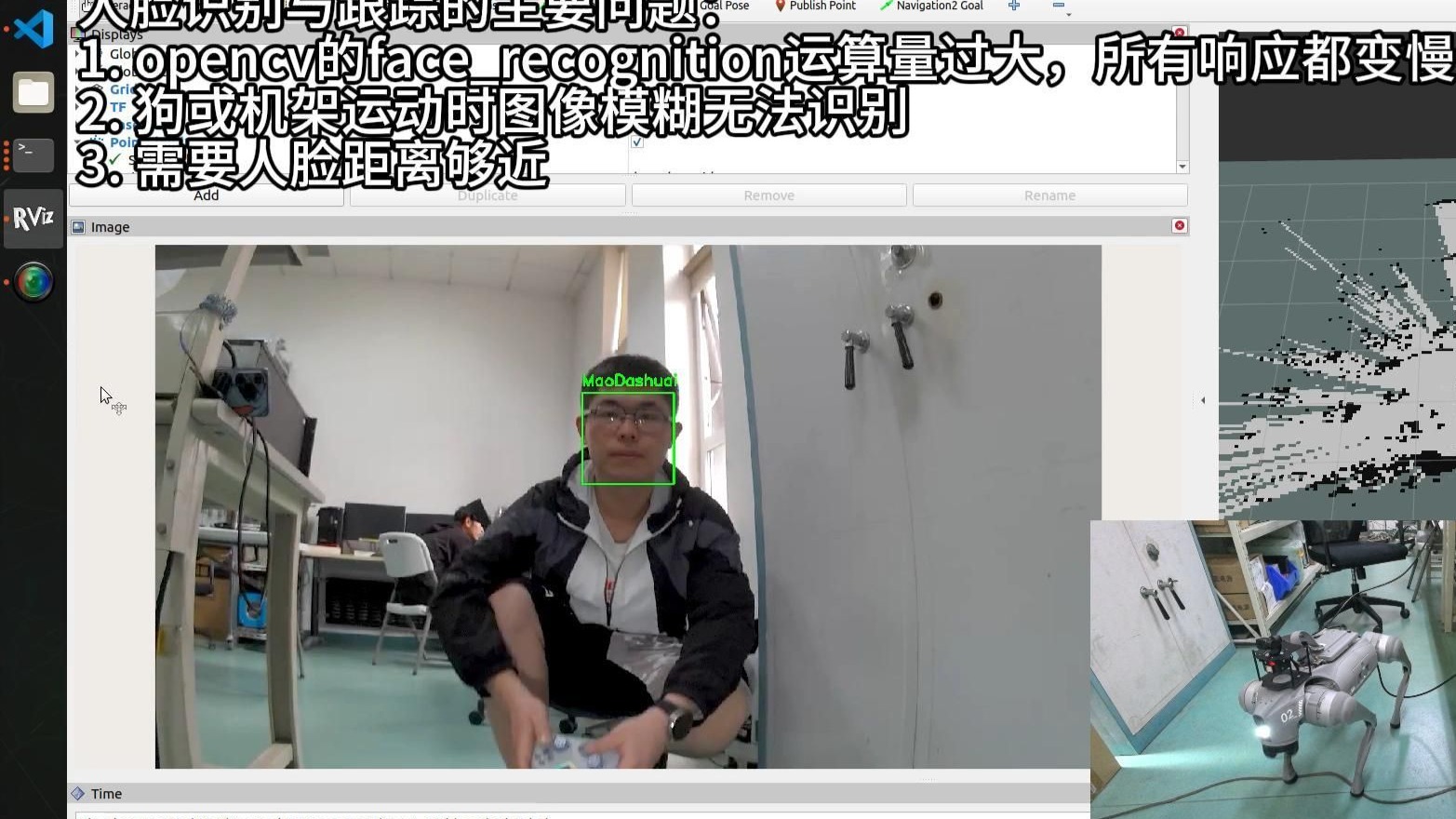
- 额外安装https://github.com/ShineMinxing/Ros2ImageProcess.git,https://github.com/ShineMinxing/Ros2AmovG1.git
⚙️ 安装指南
- Use Ubuntu 22.04, ROS2 Humble
sudo apt install ros-humble-joy ros-humble-nav2-msgs ros-humble-slam-toolbox ros-humble-nav2-bringup python3-pip libopencv-dev ros-humble-cv-bridge ros-humble-image-transport ros-humble-compressed-image-transport
mkdir -p ~/ros2_ws/LeggedRobot/src && cd ~/ros2_ws/LeggedRobot/src
git clone --recursive https://github.com/ShineMinxing/Ros2Go2Estimator.git
cd ..
# 1. 搜索工程中的所有 /home/unitree/ros2_ws/LeggedRobot,替换为您的路径
# 2. 把 src/Ros2Go2Estimator/config.yaml 中的所有 br0 替换为您的网卡名,如 enxf8e43b808e06
colcon build
ros2 launch sport_control go2_launch.py
- 同时按下手柄的LT、RT,解锁/锁定手柄;按住RT+左摇杆进行移动;按住RT+右摇杆进行旋转;更多操作请看sport_control_node.cpp。
📄 相关文档
- 核心算法原理: 技术文档
- 历史项目参考: Aliengo ROS1项目
📧 联系我们
博士团队: 401435318@qq.com
研究所: 中国科学院光电技术研究所
📌 注意:当前为开发预览版,完整文档正在编写中 ``
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.