
Repository Summary
| Description | |
| Checkout URI | https://github.com/gentijo/rosbots.archive.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-02-27 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| drive_base_msgs | 0.0.0 |
| micro_ros_agent | 2.0.3 |
| micro_ros_msgs | 1.0.0 |
README
ESP32 Maqueen Battle Bots
This project consists of MicroROS running on an ESP32 and ROS2 running on a Host computer.
The ESP32 based Turtle bot consists of off the shelf parts
https://www.dfrobot.com/product-1783.html
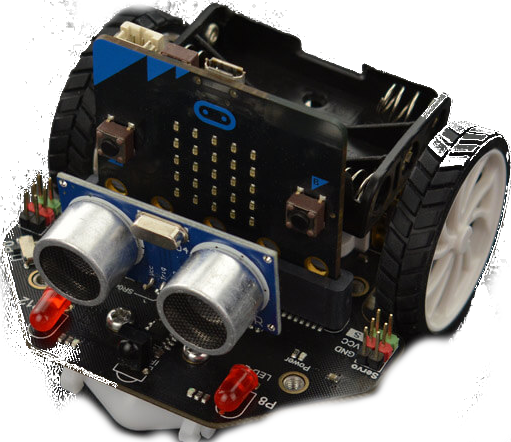
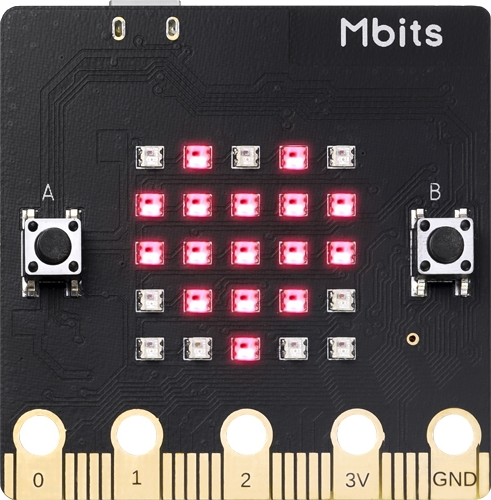
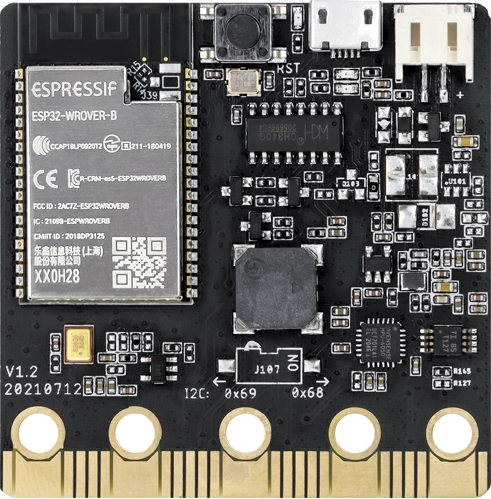
and the MBits ESP32 replacement for a MicroBit boaord. https://www.elecrow.com/mbits.html
The Development Environment
The development enviroment will consist of 2 docker containers. One Docker container will run the Host ROS2 system Anther Docker container will act as the Build/Debug platform for the ESP32 code / MicroROS.
Create the Docker container for Esp32 Maqueen Turtlebot
Clone this repository on to your host system From the top level directory, run the following commands.
Build the Docker Image
- docker build -t mros-esp32-idf docker/microros-espidf/
Launch the container
- sh docker/microros-espidf/startNode.sh
Compile the ESP32 code from within the container
Execute a bash shell to attach to the container then execute the following commands
-
cd /opt/microros/bots/maqueen-esp32
-
source /opt/esp/idf/export.sh
-
idf.py fullclean
-
idf.py reconfigure
-
idf.py build
Upload the code to the ESP32 board
Connect the MBits board to your host computer and using the USB connection and run the following commands
- idf.py flash
Once the code is uploaded to the board, you can observe basic logging using the built in Serial Monitor.
- idf.py monitor
To Create the Docker that will run the Host System
From the top level directory execute
-
docker build -t rosimg ./docker/ros/
-
sh docker/ros/startNodeUnix.sh rosn10
To compile and run the MicroROS Agent code
Execute the following commands
-
cd /opt/ros/ros_ws/agent
-
source /opt/ros/galactic/local_setup.bash
-
source install/local_setup.bash
-
rosdep init
-
rosdep update
-
rosdep install –from-paths src –ignore-src -y
-
colcon build –cmake-clean-cache –cmake-clean-first –cmake-force-configure
To run the MicroROS Agent
Execute the following commands
-
source install/local_setup.bash
-
ros2 run micro_ros_agent micro_ros_agent udp4 –port 8888