
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | [IROS 2024] DeRO: Dead Reckoning Based on Radar Odometry With Accelerometers Aided for Robot Localization |
| Checkout URI | https://github.com/hoangvietdo/dero.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-13 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | localization radar odometry ros2-foxy |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- viet-incsl
Authors
DeRO
Dead Reckoning Based on Radar Odometry With Accelerometers Aided for Robot Localization
News / Events
- December 26, 2024 - The manuscript has been online at the IEEE IROS.
- June 30, 2024 - The paper has been accepted for publication in the IROS 2024 as an oral presentation.
- March 11, 2024 - The manuscript has been online at the arXiv.
- March 05, 2024 - Our paper has been submitted to IROS 2024.
1. Overview
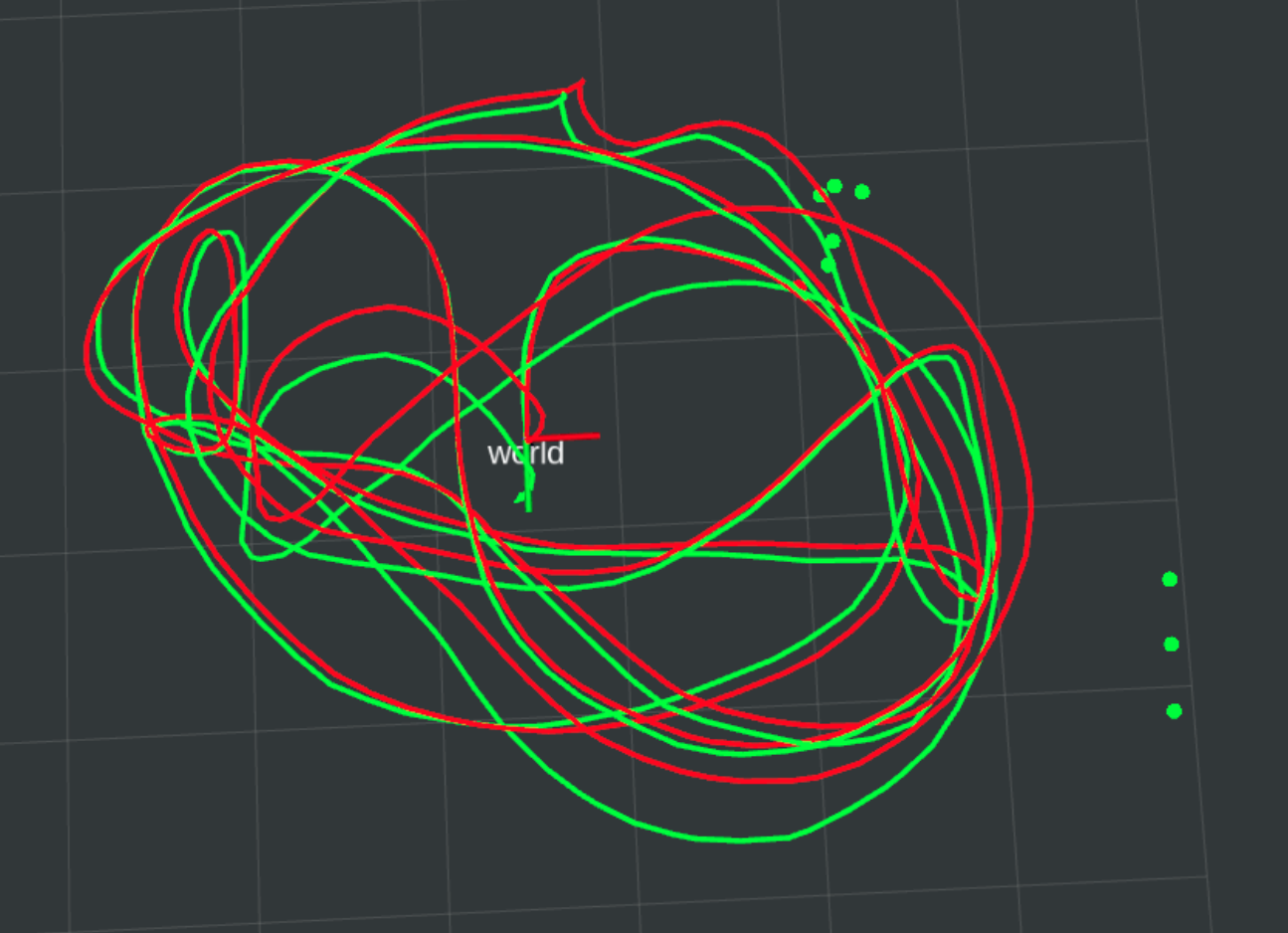
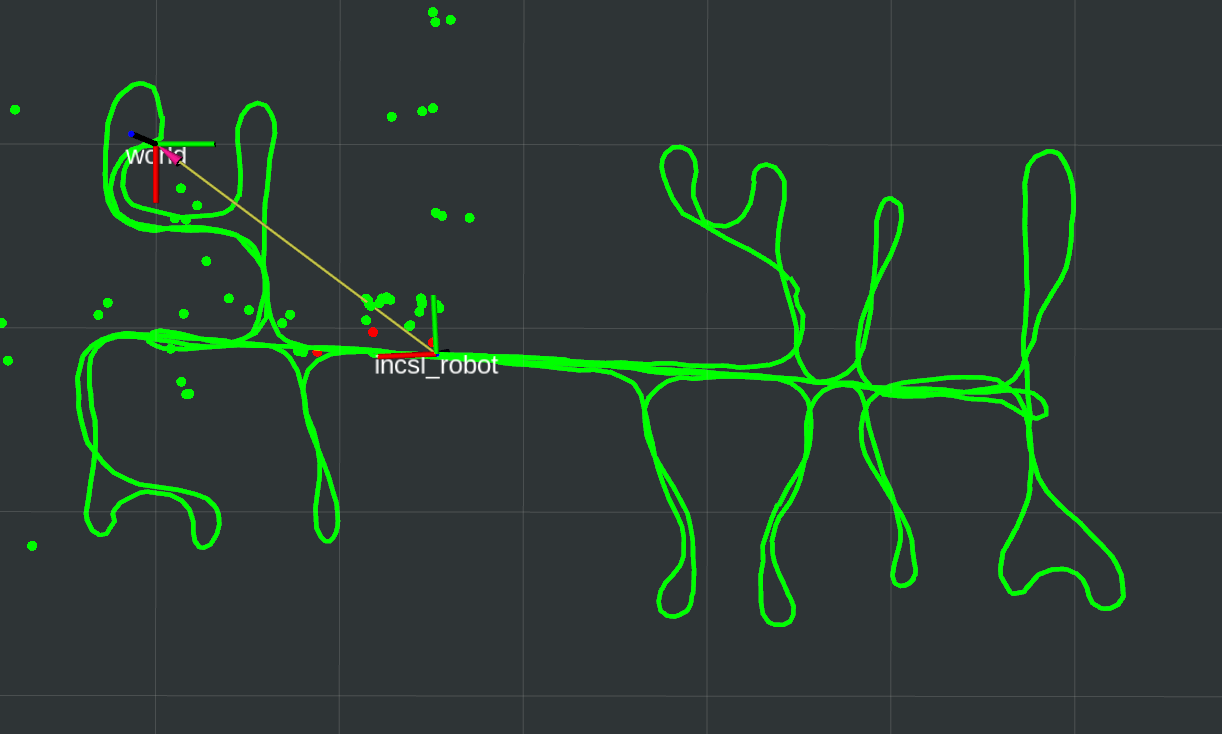
This is a ROS 2 package for DeRO, written in C++. DeRO utilizes 4D point cloud measurements from a millimeter-wave Frequency-Modulated Continuous Wave (FMCW) radar and IMU measurements to estimate the robot’s poses. Specifically, Doppler velocity and gyroscope measurements are used to calculate odometry, while the radar’s range and accelerometer measurements are utilized to update the estimation using a Stochastic Cloning Extended Kalman Filter (SCEKF).
2. Prerequisites
- Ubuntu 20.04.
- ROS2 Foxy.
- Open-source datasets for reproducing the paper’s results can be downloaded from here.
- This package was tested with
C++14,PCL 1.10.0, andEigen 3.3.7.
3. Build
- Clone the repository and build:
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/hoangvietdo/dero
cd ..
colcon build
Note: There will be some warnings, but just ignore them.
4. Run
- Choose the dataset you want to run on (e.g., Carried 1, Carried 2, etc.) and convert the ROS1 bag to ROS2 bag using
rosbags-convert. - Change the value of
est_save_dirandbag_dirin the corresponding launch file (e.g.,dero_carried_1_ros2bag.launch.py(proposed method) orrio_carried_1_ros2bag.launch.py(compared method)) - In 1st terminal: Execute the launch file
ros2 launch dero dero_carried_1_ros2bag.launch.py
- In 2nd terminal: Open the rviz config file
config/dero_carried_1.rvizusing
rviz2
5. Evaluation
- We use a modified version of rpg_trajectory_evaluation for verifying the filter’s performances.
- By default, the .txt file generated from
est_save_diris already compatible with the aforementioned toolbox. - The pseudo-ground truth is given in
results/carried_datasets/laptop/.
6. Credit / Acknowledgements
- This code was written at the Intelligent Navigation and Control Systems Laboratory, Sejong University, Seoul, Republic of Korea.
- Some parts of the code are referenced from REVE, EKF-RIO, and EnVIO.
- This work was supported by the Unmanned Vehicles Core Technology Research and Development Program through the National Research Foundation of Korea (NRF), Unmanned Vehicle Advanced Research Center (UVARC) funded by the Ministry of Science and ICT, the Republic of Korea (No. 2020M3C1C1A01086408 and NRF-2023M3C1C1A01098408).
7. Citation
If you find this work beneficial to your academic research, we would greatly appreciate it if you could reference our paper in your citations.
@INPROCEEDINGS{do2024dero,
author={Do, Hoang Viet and Hun Kim, Yong and Lee, Joo Han and Ho Lee, Min and Song, Jin Woo},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={DeRO: Dead Reckoning Based on Radar Odometry With Accelerometers Aided for Robot Localization},
year={2024},
volume={},
number={},
pages={8547-8554},
keywords={Accelerometers;Matched filters;Dead reckoning;Radar measurements;Estimation;Doppler radar;Gyroscopes;Odometry;Doppler effect;Velocity measurement},
doi={10.1109/IROS58592.2024.10801645}}
8. License
Our source code is released under the GPLv3 license. If there are any issues in our source code please contact the author hoangvietdo@sju.ac.kr.
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| launch_ros | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| rosbag2_cpp | |
| geometry_msgs | |
| tf2_eigen | |
| tf2_ros | |
| pcl_conversions | |
| pcl_1.10 |