No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
ndt_omp_ros2 package from roboracer-3dlidar repondt_omp_ros2 graph_based_slam lidarslam lidarslam_msgs scanmatcher livox_ros_driver2 scanmatcher_custom |
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | This repository contains the drivers to directly include the Livox MID-360 into the existing RoboRacer/ former F1Tenth stack. |
| Checkout URI | https://github.com/tum-avs/roboracer-3dlidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-07 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
OpenMP boosted NDT and GICP algorithms
Additional Links
No additional links.
Maintainers
- koide
Authors
No additional authors.
ndt_omp_ros2
This package provides an OpenMP-boosted Normal Distributions Transform (and GICP) algorithm derived from pcl. The NDT algorithm is modified to be SSE-friendly and multi-threaded. It can run up to 10 times faster than its original version in pcl.
Benchmark
$ cd ~/ros2_ws/src/ndt_omp_ros2/data
$ ros2 run ndt_omp_ros2 align 251370668.pcd 251371071.pcd
--- pcl::GICP ---
single : 267.385[msec]
10times: 1151.76[msec]
fitness: 0.220382
--- pclomp::GICP ---
single : 173.152[msec]
10times: 1299.14[msec]
fitness: 0.220388
--- pcl::NDT ---
single : 425.142[msec]
10times: 3638.77[msec]
fitness: 0.213937
--- pclomp::NDT (KDTREE, 1 threads) ---
single : 308.935[msec]
10times: 3095.53[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 1 threads) ---
single : 188.942[msec]
10times: 1373.47[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 1 threads) ---
single : 41.3584[msec]
10times: 347.261[msec]
fitness: 0.208511
--- pclomp::NDT (KDTREE, 8 threads) ---
single : 108.68[msec]
10times: 1046.16[msec]
fitness: 0.213937
--- pclomp::NDT (DIRECT7, 8 threads) ---
single : 56.9189[msec]
10times: 545.279[msec]
fitness: 0.214205
--- pclomp::NDT (DIRECT1, 8 threads) ---
single : 16.7266[msec]
10times: 169.097[msec]
fitness: 0.208511
Several methods for neighbor voxel search are implemented. If you select pclomp::KDTREE, results will be completely same as the original pcl::NDT. We recommend to use pclomp::DIRECT7 which is faster and stable. If you need extremely fast registration, choose pclomp::DIRECT1, but it might be a bit unstable.
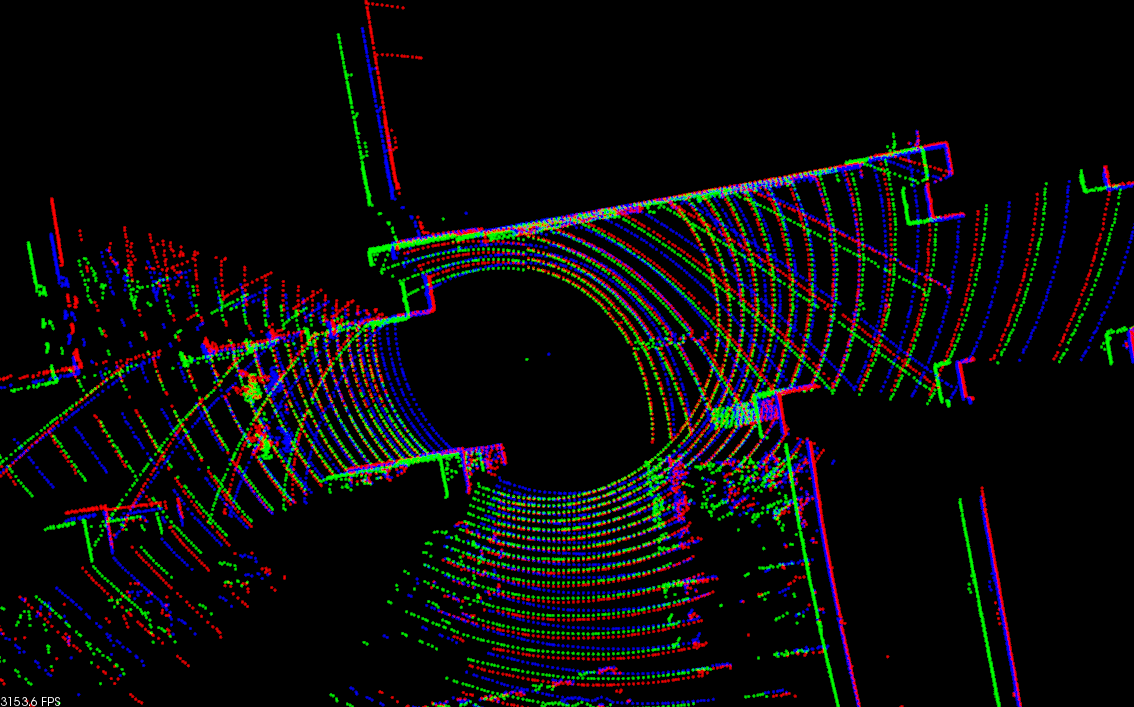
Red: target, Green: source, Blue: aligned
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged ndt_omp_ros2 at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.