No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
rqt_drone_teleop package from jderobot_drones repodrone_assets drone_circuit_assets drone_wrapper jderobot_drones rotors_driver rqt_drone_teleop rqt_ground_robot_teleop tello_driver |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.4.2 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/JdeRobot/drones.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-06-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
A common drone teleop interface for all drone exercises in the JdeRobot Robotics Academy
Additional Links
No additional links.
Maintainers
- Pedro Arias
Authors
- Nikhil Khedekar
- Pedro Arias
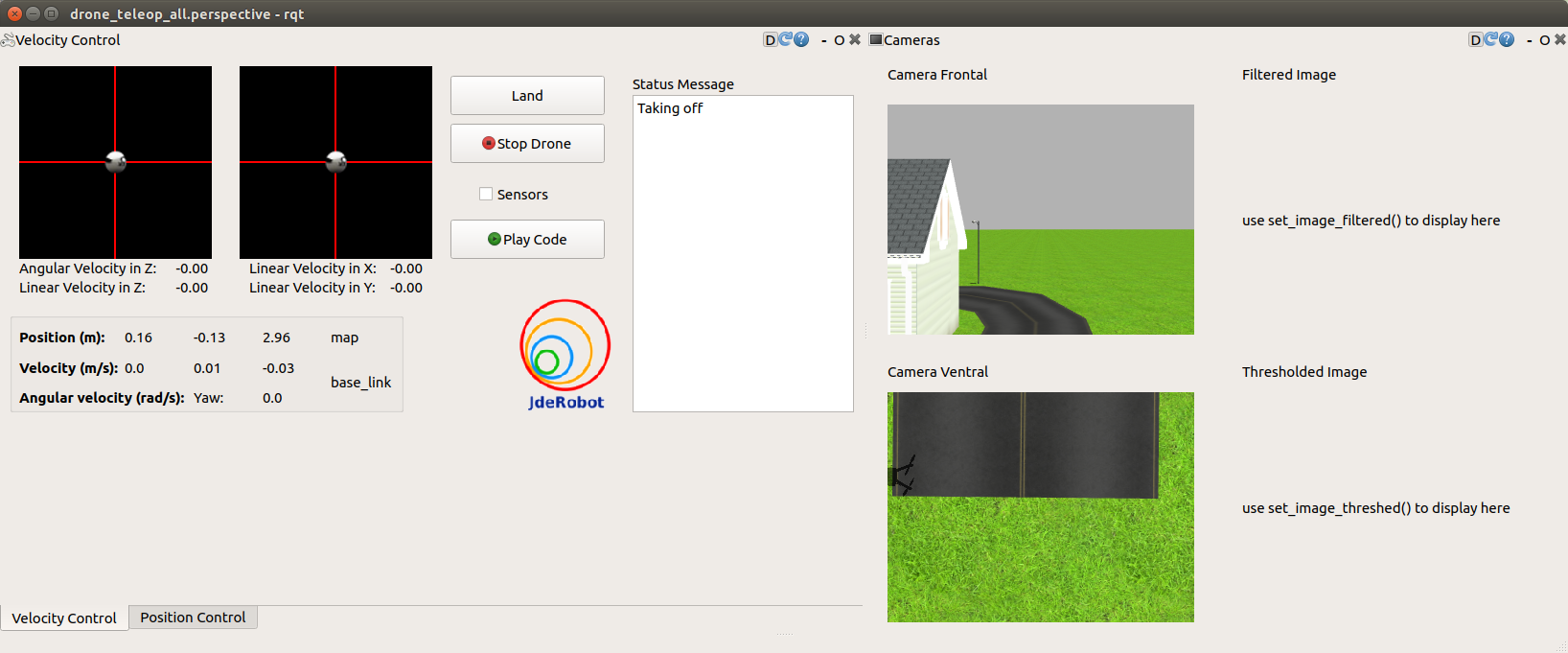
rqt_drone_teleop
This is a common package to provide a teleoperation interface for the drone exercises in the JdeRobot Robotics Academy.
This package contains different RQT plugins:
- Position Teleop
[See]

- Velocity Teleop
[See]

- Cameras Viewer
[See]

Plugins can be grouped in one perspective (GUI) following the user needings.
CHANGELOG
Changelog for package rqt_drone_teleop
1.4.2 (2021-10-04)
- python-rospkg doesn't exist in noetic release, replacing with python3-rospkg
- corrected maintainer
- Contributors: Nikhil Khedekar, pariaspe
1.4.0 (2021-04-23)
- Noetic release
- Contributors: pariaspe
1.3.8 (2021-04-14)
1.3.7 (2021-03-01)
1.3.6 (2021-01-12)
- New setup.py. Fixing jenkins-build fail.
- Contributors: pariaspe
1.3.5 (2020-12-29)
- Freeze fixed using python threadings. Might be improved using a ROS-based solution.
- Removed RQT dependencies with subscribers and topics. These topics are now throttled by new drone_wrapper topics. This allows to make the RQT independent to the kind of drone connected.
- Template dependency removed from rqt_drone_teleop. The template callbacks are no longer required to send commands to the drone. The command flow goes directly from the rqt to the drone wrapper without passing through the exercise template.
- Removed RQT dependencies with subscribers and topics. These topics are now throttled by new drone_wrapper topics. This allows to make the RQT independent to the kind of drone connected.
- Template dependency removed from rqt_drone_teleop. The template callbacks are no longer required to send commands to the drone. The command flow goes directly from the rqt to the drone wrapper without passing through the exercise template.
- Contributors: pariaspe
1.3.4 (2020-06-28)
- Added perspectives
- READMEs updated
- Added new GUI screenshots
- Contributors: pariaspe
1.3.3 (2020-06-10)
- Takeoff button disabled until landed state is defined (drone is ready).
- Takeoff/land button synchronized between vel and pos teleop.
- RQT freezing fixed.
- Drone teleop pkg modularized into two modules: rqt_vel_teleop and rqt_cam_viewer.
- One new module is added: rqt_pos_teleop.
- Added support to greyscale8 images.
- Contributors: pariaspe
1.3.2 (2020-05-06)
- New GUI for rqt_drone_teleop plugin. Added position and velocity info.
- Contributors: diegomrt, Pedro Arias
1.3.1 (2020-02-14)
- Fixing dependency on metapackage
- Contributors: Pedro Arias
1.2.0 (2020-02-11)
1.1.0 (2020-01-20)
- generating pkg for melodic distro
- Contributors: Pedro Arias
1.0.1 (2019-08-18)
- added topics as parameters
- Contributors: Nikhil Khedekar
1.0.0 (2019-08-01)
- corrected dependancies
- stop drone button now also stops code
- updated gui image
- removed launch and perspective
- Contributors: Nikhil Khedekar
0.0.1 (2019-07-20)
- updated makefile
- updated ui and functionality
- updated teleop
- added screenshot
- added mode 2 sticks
- changed casing and fixed image path for teleop
- corrected perspective
- shifted to a common teleop
- Contributors: Nikhil Khedekar
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Dependant Packages
| Name | Deps |
|---|---|
| jderobot_drones |
Launch files
- launch/rqt_drone_teleop.launch
-
- perspective [default: $(find rqt_drone_teleop)/perspectives/drone_teleop_vel_cam.perspective]
- height [default: 3]
- precision [default: 0.05]
Messages
No message files found.
Services
No service files found
Recent questions tagged rqt_drone_teleop at Robotics Stack Exchange
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.