
|
carla-e2e-av-stack repositoryaloam_velodyne sc_aloam_velodyne loam_utils vehicle_ctrl carla_msgs lidar_to_grid pcl_conversions pcl_ros perception_pcl |
|
|
Repository Summary
| Description | This repository contains the code for an end-to-end autonomous vehicle stack, including perception, planning, and control, built for CARLA. |
| Checkout URI | https://github.com/soumya997/carla-e2e-av-stack.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-03-31 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| aloam_velodyne | 0.0.0 |
| sc_aloam_velodyne | 0.0.0 |
| loam_utils | 0.0.0 |
| vehicle_ctrl | 0.0.0 |
| carla_msgs | 1.3.0 |
| lidar_to_grid | 0.0.1 |
| pcl_conversions | 2.6.1 |
| pcl_ros | 2.6.1 |
| perception_pcl | 2.6.1 |
README
Carla E2E AV Stack
This repository offers a ready-to-use perception and control stack for autonomous vehicles, designed to streamline development and testing in CARLA. With a simple plug-and-play approach, it provides a foundational pipeline for experimenting with perception algorithms and integrating outputs with planning and control, saving time and letting you focus on innovation.
currently its capable of,
- load any town’s lanelet map
- spawn and set goal using rviz
- Use A-LOAM or SC-A-LOAM for odometry.
- evaluate odometry based on MSE-ATE, and scale error.
- Waypoint following using PID control.
- Run in both ROS1 and ROS2
- EKF sensor fusion of IMU and LiDAR
- Add Occupancy grid carla E2E AV
Articles:
- Setup ROS2 with Carla: https://learnopencv.com/ros2-and-carla-setup-guide/
- About building this project: https://learnopencv.com/pid-controller-ros-2-carla/
- LiDAR SLAM: https://learnopencv.com/lidar-slam-with-ros2/
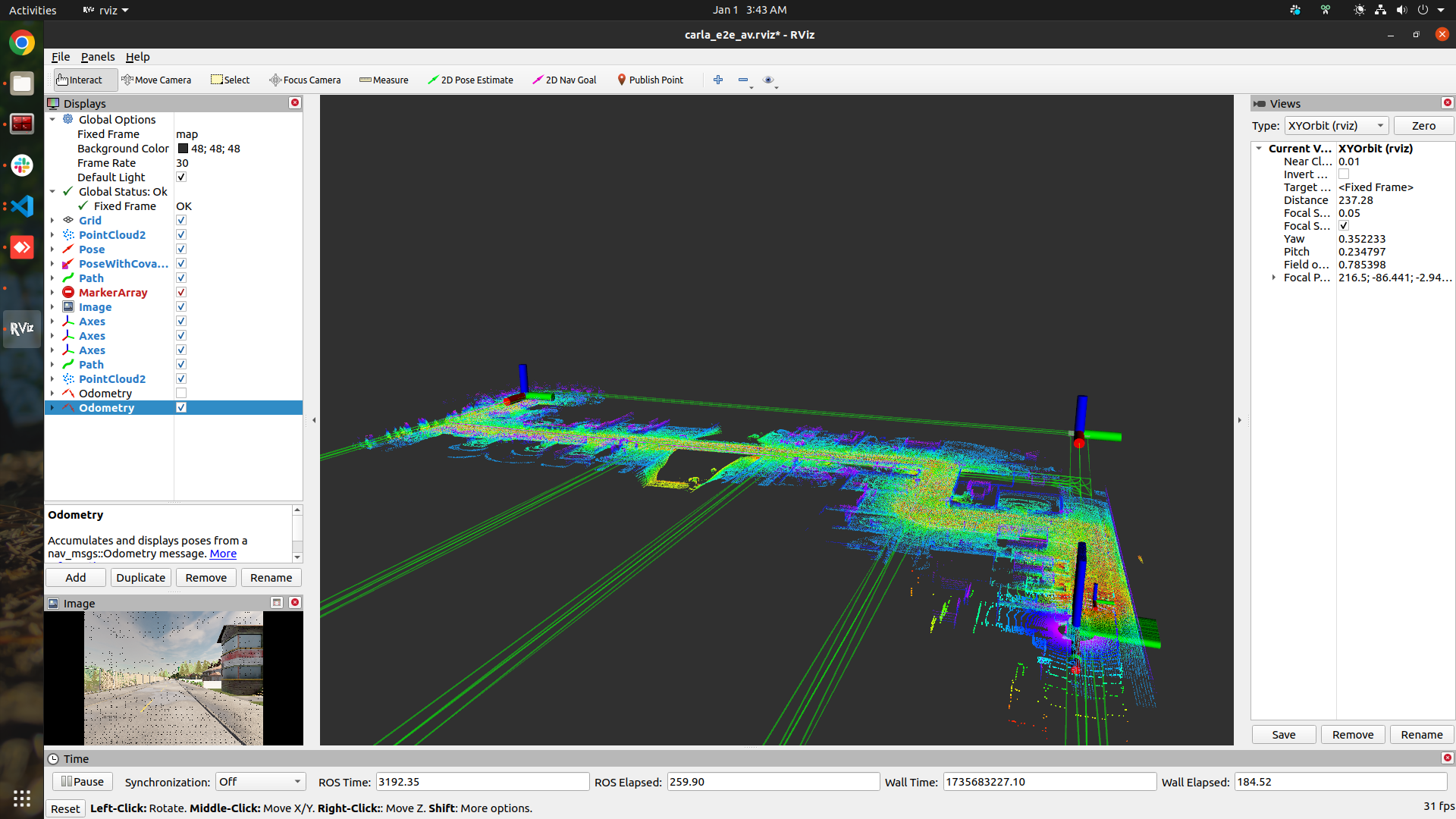
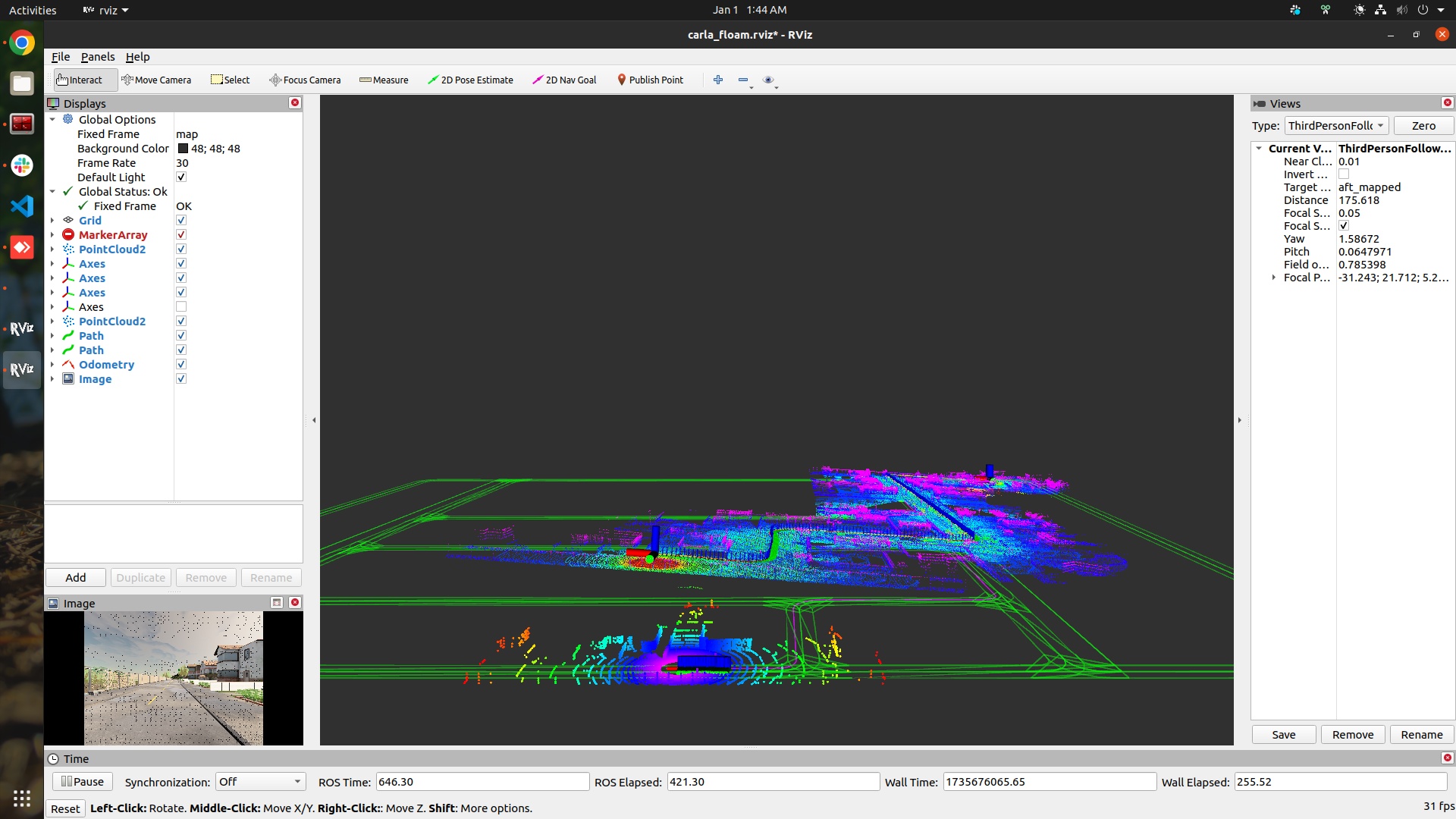
A-LOAM and SC-A-LOAM comparison
Below are two separate tables summarizing A-LOAM and SC-A-LOAM performance based on latency and memory.
| A-LOAM | SC-A-LOAM |
|---|---|
 |
 |
 |
 |
A-LOAM
| Parameter | Value |
|---|---|
| Odom Rate | 20 Hz (/aft_mapped_path) |
| Map Rate | 1 Hz (/laser_cloud_map) |
| RMS ATE | 0.9114 m |
| Scale Error | 0.15% |
| /alaserMapping | 159800 byte (~159.8 KB) |
| /alaserOdometry | 142164 byte (~142.164 KB) |
| /ascanRegistration | 32060 byte (~32.06 KB) |
SC-A-LOAM
| Parameter | Value |
|---|---|
| Odom Rate | 10 Hz (/aft_pgo_path) |
| Map Update | 0.100 Hz (/aft_pgo_map) |
| Map Node | 233.840 kb |
| Odometry | 142.240 kb |
| PGO | 110.800 kb |
| Scan Registration | 32.004 kb |
| RMS ATE | 14 - 20 m |
| Scale Error | 0.37% |
Download bagfile
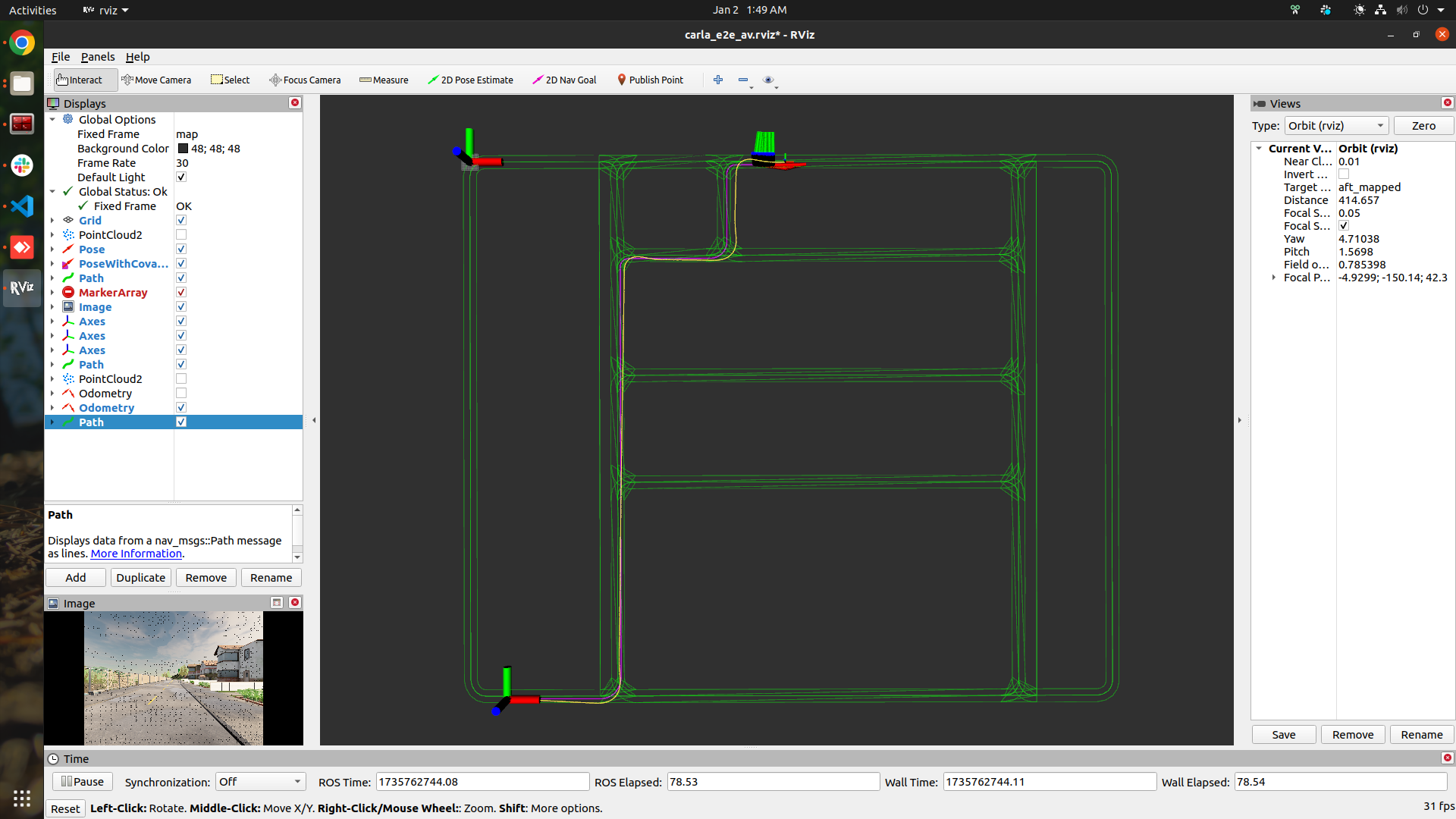
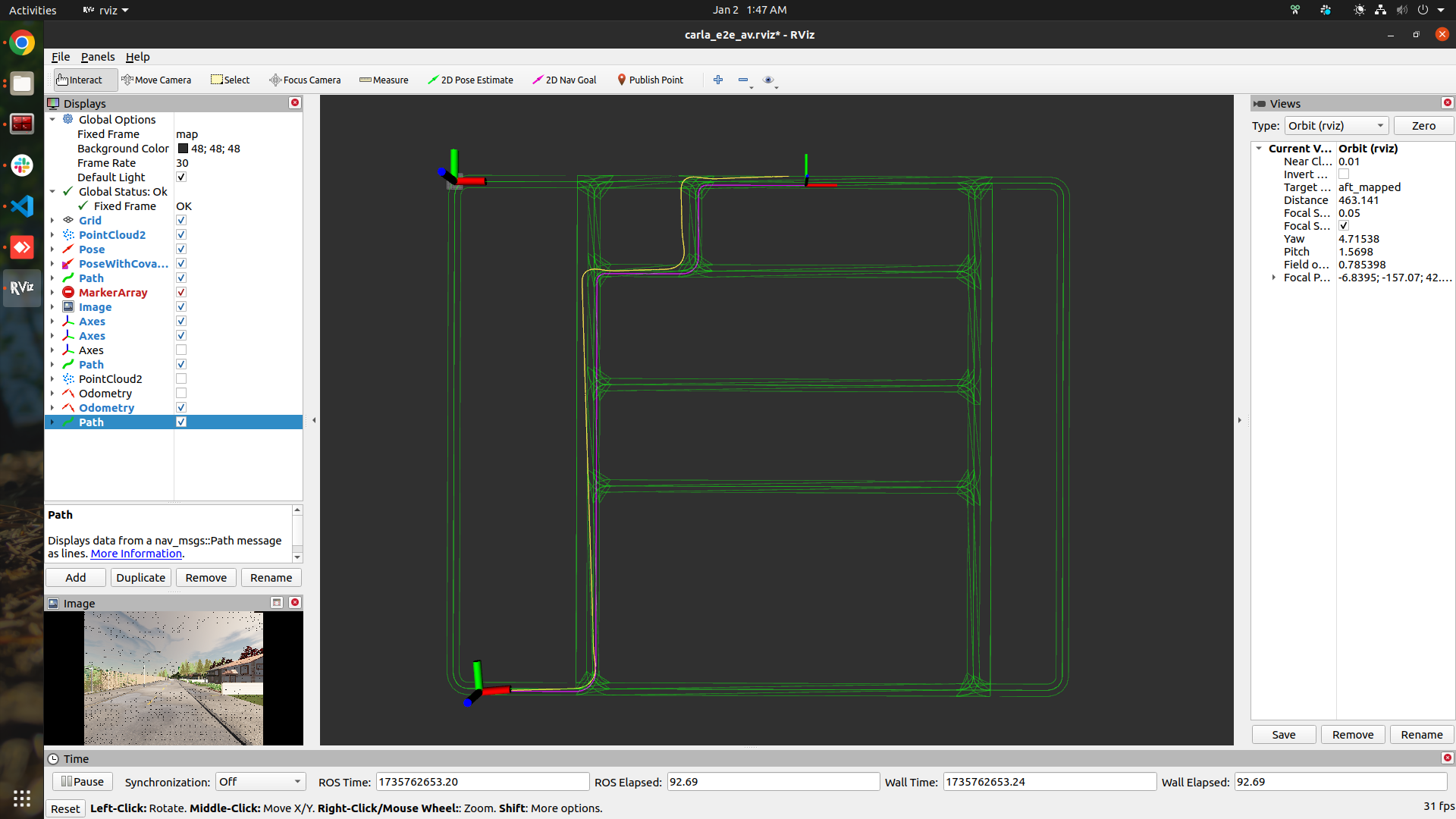
Comparison based on the a fixed trajectory
| A-LOAM | SC-A-LOAM |
|---|---|
 |
 |
Dependency
- Carla 0.9.11
- ROS1 noetic and ROS2 humble
- Ceres Solver , PCL and PCL-conversitions
Run ROS1 code
Run the AV stack without odometry from LOAM in ROS1
build:
$ git clone https://github.com/soumya997/carla-e2e-av-stack.git
$ cd carla-e2e-av-stack/ros1_ws
$ catkin_make
$ source devel/setup.bash
Run the code:
$ $CARLA_ROOT/CarlaUE4.sh -quality-level=Low -prefernvidia -nosound
$ cd /home/opencvuniv/carla-ros-bridge/catkin_ws && source devel/setup.bash
$ roslaunch carla_ros_bridge carla_ros_bridge.launch synchronous_mode:=True town:=Town01
$ cd /home/opencvuniv/carla-ros-bridge/catkin_ws && source devel/setup.bash
$ roslaunch carla_spawn_objects carla_example_ego_vehicle.launch spawn_sensors_only:=False objects_definition_file:=/home/opencvuniv/Work/somusan/robotics/nice_e2e_carla_av/trash/carla_e2e_ws/src/vehicle_ctrl/maps/objects.json
$ cd /home/opencvuniv/carla-ros-bridge/catkin_ws && source devel/setup.bash
$ roslaunch carla_waypoint_publisher carla_waypoint_publisher.launch
$ cd /home/opencvuniv/Work/somusan/robotics/nice_e2e_carla_av/trash/carla_e2e_ws && source devel/setup.bash
$ roslaunch vehicle_ctrl run_vehicle.launch
use the `2D Pose Estimate` to spawn a vehicle and `2D Nav Goal` to give the goal.
now, the car should be start running
Run with A-LOAM/SC-A-LOAM Odometry
- uncomment code under
# Subscriber to the LOAM odometry topic, and comment out the code under# Subscriber to the /carla/ego_vehicle/odometry topic. - run A-LOAM code using the below code,
$ roslaunch aloam_velodyne aloam_velodyne_VLP_16_v2.launch lidar_topic:=/carla/ego_vehicle/lidar
$ python src/loam_utils/scripts/static_trf_broadcast.py
$ python src/loam_utils/scripts/aloam_odom_trf.py
- run A-LOAM code using the below code,
$ roslaunch aloam_velodyne aloam_mulran.launch
$ python src/loam_utils/scripts/static_trf_broadcast.py
$ python src/loam_utils/scripts/aloam_odom_trf.py
Run ROS2 code
Run the AV stack without odometry from LOAM in ROS1. LOAM dont have ROS2 support, so uncomment the code under # Subscriber to the /carla/ego_vehicle/odometry topic and comment the code under # Subscriber to the LOAM odometry topic.
# in a new terminal, run carla first
# ./CarlaUE4.sh # or ./CarlaUE4.sh -prefernvidia # $ ~/carla_simulator/PythonAPI/util/config.py --map Town01
$CARLA_ROOT/CarlaUE4.sh -quality-level=Low -prefernvidia -nosound
# in a new terminal, get inside the `carla-ros-bridge/colcon_ws` folder and source the workspace; launch the `carla ros-bridge`
cd ~/carla-ros-bridge/colcon_ws && source install/setup.bash
ros2 launch carla_ros_bridge carla_ros_bridge.launch.py synchronous_mode:=True town:=Town01 # <town number, eg: 03>
# in a new terminal, launch the objects.json; launch ros-bridge
# cd ~/carla-ros-bridge/colcon_ws
cd ~/carla-ros-bridge/colcon_ws && source install/setup.bash
ros2 launch carla_spawn_objects carla_example_ego_vehicle.launch.py spawn_sensors_only:=False objects_definition_file:=<absolute path to>/src/vehicle_ctrl/vehicle_ctrl/config/objects.json
# load the town1 lanelet map
python src/vehicle_ctrl/vehicle_ctrl/lanelet_map.py
# in new terminal, launch the rviz2 [set the global frame to map in rviz2]
rviz2 -d /src/vehicle_ctrl/rviz2/carla_map_spawn_anywherev2.rviz
# in a new terminal, get inside the `carla-ros-bridge/colcon_ws` folder and source the workspace; waypoint publisher
cd ~/carla-ros-bridge/colcon_ws && source install/setup.bash
ros2 launch carla_waypoint_publisher carla_waypoint_publisher.launch.py
# goal remap
python src/vehicle_ctrl/vehicle_ctrl/remap_goal.py
# waypoint following using carls ros-bridge
python src/vehicle_ctrl/vehicle_ctrl/simple_ctrl.py
Trouble shoot
- if getting issue builing the packages, something like
$ colcon build --packages-select pcl_ros
Starting >>> pcl_ros
--- stderr: pcl_ros
CMake Error at CMakeLists.txt:13 (find_package):
By not providing "FindPCL.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "PCL", but
CMake did not find one.
Could not find a package configuration file provided by "PCL" with any of
the following names:
PCLConfig.cmake
pcl-config.cmake
Add the installation prefix of "PCL" to CMAKE_PREFIX_PATH or set "PCL_DIR"
to a directory containing one of the above files. If "PCL" provides a
separate development package or SDK, be sure it has been installed.
Solution:
- locate PCLConfig.cmake
- $ export PCL_DIR=<path from above command> #/home/somusan/miniconda3/envs/gaussian_splattingv1/share/pcl-1.14
- $ colcon build --packages-select pcl_conversions
- colcon build --packages-select pcl_ros
- issue in running lidar_to_grid_node
$ ros2 run lidar_to_grid lidar_to_grid_node
/home/somusan/dev-somusan/trash/carla-e2e-av-stack/ros2_ws/install/lidar_to_grid/lib/lidar_to_grid/lidar_to_grid_node: error while loading shared libraries: libpcl_common.so.1.14: cannot open shared object file: No such file or directory
[ros2run]: Process exited with failure 127
somusan@somusan:~/.../carla-e2e-av-stack/ros2_ws
$ locate libpcl_common.so
/home/somusan/miniconda3/envs/gaussian_splattingv1/lib/libpcl_common.so
/home/somusan/miniconda3/envs/gaussian_splattingv1/lib/libpcl_common.so.1.14
/home/somusan/miniconda3/envs/gaussian_splattingv1/lib/libpcl_common.so.1.14.1
/home/somusan/miniconda3/pkgs/pcl-1.14.1-h679aaff_7/lib/libpcl_common.so
/home/somusan/miniconda3/pkgs/pcl-1.14.1-h679aaff_7/lib/libpcl_common.so.1.14
/home/somusan/miniconda3/pkgs/pcl-1.14.1-h679aaff_7/lib/libpcl_common.so.1.14.1
/snap/cloudcompare/208/usr/lib/x86_64-linux-gnu/libpcl_common.so.1.8
/snap/cloudcompare/208/usr/lib/x86_64-linux-gnu/libpcl_common.so.1.8.1
/usr/lib/x86_64-linux-gnu/libpcl_common.so.1.12
/usr/lib/x86_64-linux-gnu/libpcl_common.so.1.12.1
somusan@somusan:~/.../carla-e2e-av-stack/ros2_ws
$ export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/somusan/miniconda3/envs/gaussian_splattingv1/lib/
somusan@somusan:~/.../carla-e2e-av-stack/ros2_ws
$ ros2 run lidar_to_grid lidar_to_grid_node
[INFO] [1743370182.039492340] [lidar_to_grid_node]: LidarToGridNode initialized
^C[INFO] [1743370196.641993804] [rclcpp]: signal_handler(signum=2)
PS: contributions are welcomes.