
|
hiwin_ros repositoryhiwin_description hiwin_driver hiwin_ra605_710_moveit_config hiwin_ra610_1476_moveit_config hiwin_ra610_1869_moveit_config pass_through_controllers |
|
|
Repository Summary
| Description | ROS Packages to control and monitor HIWIN Robots and Electric Grippers |
| Checkout URI | https://github.com/hiwincorporation/hiwin_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2025-02-14 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| hiwin_description | 0.0.0 |
| hiwin_driver | 0.0.0 |
| hiwin_ra605_710_moveit_config | 0.3.0 |
| hiwin_ra610_1476_moveit_config | 0.3.0 |
| hiwin_ra610_1869_moveit_config | 0.3.0 |
| pass_through_controllers | 0.0.0 |
README
HIWIN Robot ROS

![]()
This is a ROS package developed based on the ROS-Industrial guidelines, designed to support the integration and application development of HIWIN products. The package aims to provide efficient and standardized solutions for industrial robotics.
Contents
This repository follows branch naming aligned with ROS distributions.
- Stable branches:
indigo,kinetic - Development branches:
*-devel(may be unstable)
Features
- Best Practices: Developed in adherence to ROS-Industrial Training guidelines for standardized and efficient robotics integration.
-
Integration with
ros_control: Provides a well-structured framework and standardized interfaces making it ideal for applications such as robotic arms, mobile robots, and more. - HIWIN Hardware Support: Optimized for seamless communication and control of HIWIN robotic hardware.
- MoveIt Integration: Enables motion planning, trajectory execution, and manipulation tasks.
- Robot Drivers: Built on top of the hiwin_robot_client_library (currently under development) to support position control for HIWIN robots.
Dependencies
To use this package, ensure you have the following dependencies installed:
- ROS Industrial Packages:
industrial_robot_clientindustrial_robot_simulator
- ROS Control packages:
controller_manager
- ROS Controller packages:
joint_state_controller
General Requirements
- Operating System: Ubuntu 20.04 LTS
- ROS version: Noetic Ninjemys
Getting Started
- Install ros packages Follow the steps outlined in the ROS Noetic installation instructions.
- Source the ROS Environment
source /opt/ros/noetic/setup.bash
- Create a ROS Workspace
mkdir -p $HOME/catkin_ws/src
- Clone the Repository and Build
# change to the root of the Catkin workspace
$ cd $HOME/catkin_ws
# retrieve the sources
$ git clone -b noetic-devel https://github.com/HIWINCorporation/hiwin_ros.git src/
# check build dependencies. Note: this may install additional packages,
# depending on the software installed on the machine
$ rosdep update
# be sure to change 'noetic' to whichever ROS release you are using
$ rosdep install --from-paths src/ --ignore-src --rosdistro noetic
# build the workspace (using catkin_tools)
$ catkin_make
# activate this workspace
$ source $HOME/catkin_ws/devel/setup.bash
Usage
:warning: SAFETY FIRST:warning:
It is strongly recommended to test your code in simulation before using it on physical hardware.
When testing with physical robots, ensure:
- Emergency stop functionality is operational.
- The workspace is clear of obstacles and personnel.
- Speed and acceleration limits are properly set.
Industrial robot simulator
To test the robot in a simulated environment:
$ roslaunch hiwin_ra610_1869_moveit_config moveit_planning_execution.launch sim:=true
Real Robot Control
To connect to and control a physical robot:
$ roslaunch hiwin_driver ra6_bringup.launch ra_type:=ra610_1869 robot_ip:=<robot ip>
HRSS Offline Simulation
The HIWIN Robot System Software (HRSS) provides tools for offline simulation and testing.
System Requirements
| Component | Requirement | |———————–|————————–| | Operating System | Microsoft Windows | | Screen Resolution | 1360x768 or higher |
Steps
-
Download HRSS Offline + Obtain the software from the HIWIN Download Center.
-
Start HRSS Offline
- Select the robot model (e.g.,
RA610-1869). - Enable EXT Mode.
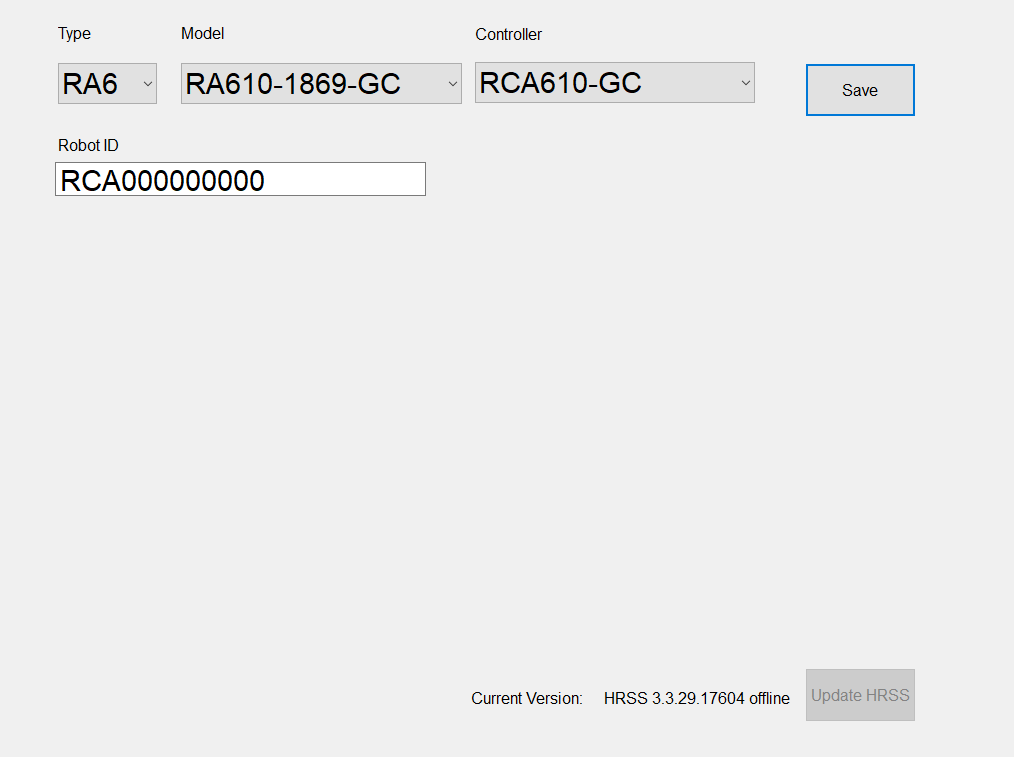
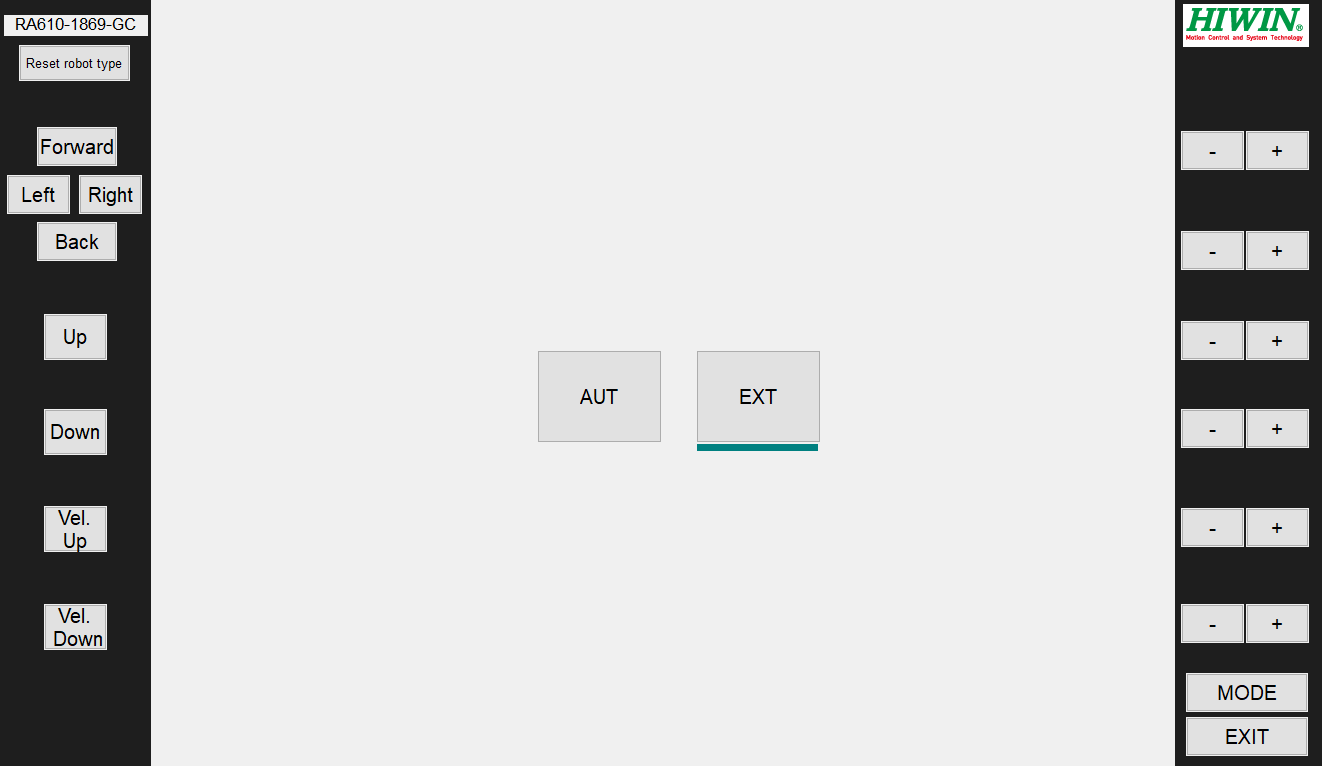
- Select the robot model (e.g.,
- Control the Simulated Robot with MoveIt!
roslaunch hiwin_ra610_1869_moveit_config moveit_planning_execution.launch sim:=false robot_ip:=<workstation ip>