No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
mg400_ros2 repositoryhardware deb common urdf ros2 mg400 mg400 mg400_bringup mg400_common mg400_description mg400_interface mg400_joy mg400_msgs mg400_node mg400_plugin mg400_plugin_base mg400_rviz_plugin |
|
|
Repository Summary
| Description | Dobot MG400 ROS2 Repository |
| Checkout URI | https://github.com/harvestx/mg400_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-09 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | hardware deb common urdf ros2 mg400 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| mg400 | 1.6.0 |
| mg400_bringup | 1.4.1 |
| mg400_common | 1.0.2 |
| mg400_description | 1.3.1 |
| mg400_interface | 1.4.0 |
| mg400_joy | 1.2.3 |
| mg400_msgs | 1.4.0 |
| mg400_node | 2.2.0 |
| mg400_plugin | 1.5.0 |
| mg400_plugin_base | 1.3.4 |
| mg400_rviz_plugin | 0.2.1 |
README
![]()
MG400_ROS2
Dobot MG400 ROS2 Repository.
Repository Status
| ROS2 Distro | Branch | Build status |
|---|---|---|
| humble | humble |
Requirements
- ROS 2
- Ubuntu22 : Humble Hawksbill
- MG400
Install
Locate package in workspace
mkdir -p ~/ws_ros2/src
cd ~/ws_ros2/src
git clone git@github.com:HarvestX/MG400_ROS2.git
Run script to install dependencies
source /opt/ros/$ROS_DISTRO/setup.bash
cd ~/ws_ros2/src/MG400_ROS2
./setup.bash
exec -l $SHELL
Build Source
Open new terminal and type followings.
source /opt/ros/$ROS_DISTRO/setup.bash
cd ~/ws_ros2
colcon build
Connect to MG400
Connect PC and MG400 to the same Ethernet via LAN cable. MG400 needs the emergency stop switch.
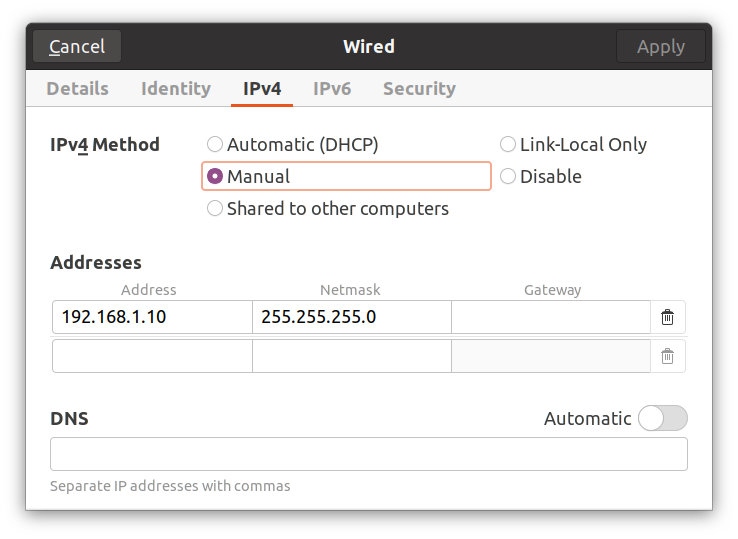
IP address settings
Set the PC’s Ethernet IPv4 IP address to a fixed IP somewhere on 192.168.1.0/24 other than 192.168.1.6.
No need to fill in the “Gateway” and “DNS”.
Check the circle light on the base of MG400 blink blue.
Launch ROS2 Packages
Before launch MG400 scripts, open new terminal and type followings.
source ~/ws_ros2/install/setup.bash
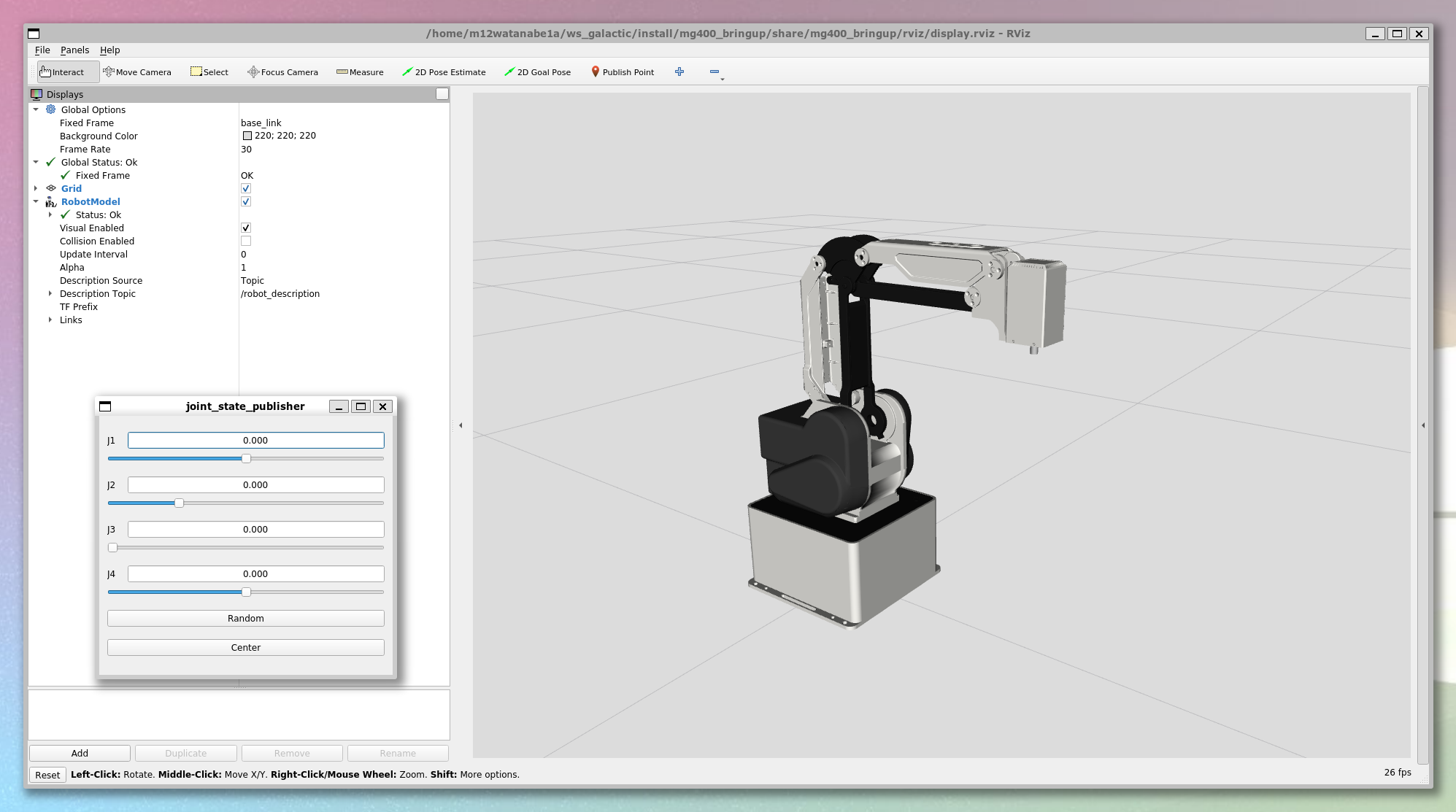
Launch display (It works without hardware.)
This command display the robot state with Rviz2. MG400 has parallel links, so the custom joint state publisher is used.
ros2 launch mg400_bringup display.launch.py
Launch main system (MG400 should be connected via LAN cable.)
This command will start service server to operate MG400 via ROS2 service.
ros2 launch mg400_bringup main.launch.py
Available services are listed here.
Test the sample program
Launch main system with other terminal. Allow enough space around the robot as it moves.
./sample.bash
Running Utilities
TCP Packet Checker
ros2 run mg400_interface show_realtime_data
References
Official ROS1 package
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.