
|
raspimouse repositoryraspimouse raspimouse_bringup raspimouse_control raspimouse_msgs raspimouse_stamped_msgs |
|
|
Repository Summary
| Description | Raspberry Pi Mouse/Jetson Nano Mouse用ROSパッケージ |
| Checkout URI | https://github.com/rt-net/raspimouse.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2022-09-28 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| raspimouse | 1.0.0 |
| raspimouse_bringup | 1.0.0 |
| raspimouse_control | 1.0.0 |
| raspimouse_msgs | 1.0.0 |
| raspimouse_stamped_msgs | 1.0.0 |
README
Raspberry Pi Mouse ROS package
Build Status
master branch
![]()
Requirements
- Raspberry Pi Mouse
- https://rt-net.jp/products/raspberrypimousev3/
- RT Robot Shop
- Linux OS
- Ubuntu Server 18.04/20.04
- https://ubuntu.com/download/raspberry-pi
- Device Driver
- ROS
ROSとLinux OSは以下の組み合わせでのみ確認しています
- ROS Melodic + Ubuntu 18.04
- ROS Noetic + Ubuntu 20.04
Installation
Binary Insallation
準備中です
Source Build
# パッケージのダウンロード
$ cd ~/catkin_ws/src
$ git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse
# 依存パッケージのインストール
$ rosdep install -r -y -i --from-paths raspimouse
# もしraspimouse_descriptionパッケージがない場合は以下も実行
$ git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
$ rosdep install -r -y -i --from-paths raspimouse_description
# ビルド&インストール
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
※ryuichiueda/raspimouse_ros_2と併用する場合、catkin_make時にSee documentation for policy CMP0002 for more detailsというメッセージとともにエラーが出る場合があります。
詳しくはrt-net/raspimouse#1のコメントを参照してください。
QuickStart
# 端末 1
$ source ~/catkin_ws/devel/setup.bash
$ roslaunch raspimouse_bringup raspimouse_robot.launch
# 端末 2
# モータの回転
$ source ~/catkin_ws/devel/setup.bash
$ rosservice call /motor_on
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.05, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.05}}'
Package Overview
raspimouse_bringup
raspimouse_controlや関連パッケージを起動するためのlaunchファイルを揃えたROSパッケージです。
raspimouse_control
Raspberry Pi Mouse制御用のROSパッケージです。
diff_drive_controllerに対応しています。
raspimouse_msgs
raspimouse_controlで用いるROS Message定義ROSパッケージです。
2021年12月1日時点でのryuichiueda/raspimouse_ros_2と互換性があります。
raspimouse_stamped_msgs
std_msgs/Headerの情報を付与したROS Message定義ROSパッケージです。
raspimouse_msgs/LightSensorValuesなどのセンサ情報の時刻をtf/tfMessageやnav_msgs/Odometryなどと同期する用途を想定しています。
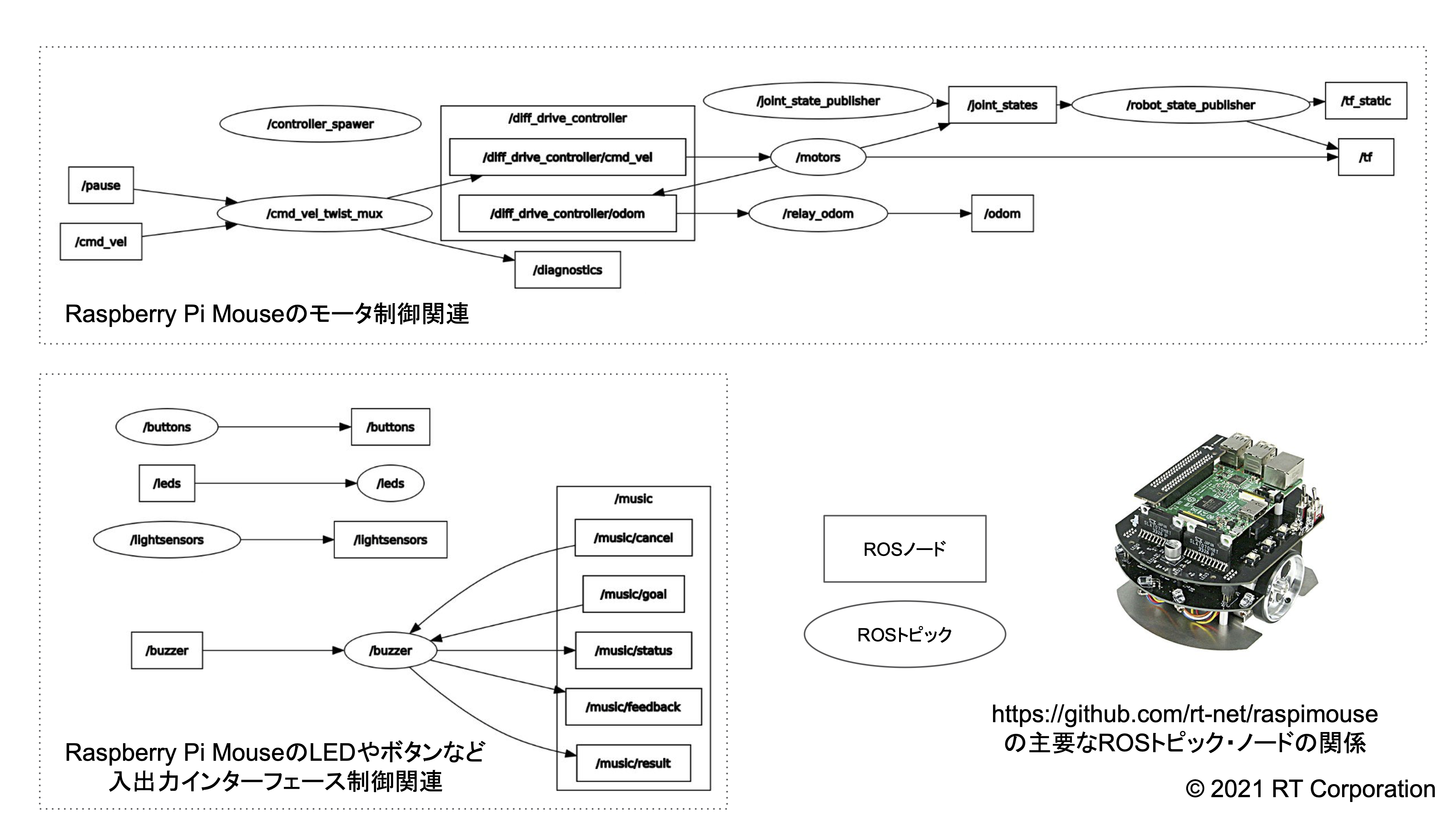
Topics
主要なトピックの一覧です。
Subscribed
-
buzzerType:
std_msgs/Int16ブザー駆動用トピックです。鳴らしたい音の周波数を指定します。
-
cmd_velType:
geometry_msgs/Twistモータ制御用トピックです。ロボットの進行方向の速度と旋回方向の角速度を指定します。
-
ledsType:
raspimouse_msgs/LedValues本体前方のLEDの制御用トピックです。4つのLEDの状態を指定します。
Published
-
buttonsType:
raspimouse_msgs/ButtonValues本体上部のタクトスイッチのステータス配信用トピックです。
メッセージ内の*_toggleデータは0.5秒程度ボタンを長押しするとTrue/Falseが切り替わります。 -
lightsensorsType:
raspimouse_msgs/LightSensorValues本体前方の距離センサのデータ配信用トピックです。
-
odomType:
nav_msgs/Odometry本体のオドメトリ配信用トピックです。
Services
主要なサービスの一覧です。
-
motor_onType:
std_srvs/Triggerモータの電源をオンにする際にコールします。
-
motor_offType:
std_srvs/Triggerモータの電源をオフにする際にコールします。
Parameters
主要なパラメータの一覧です。
-
lightsensors/frequencyType:
intDefault:
10lightsensorsトピックの配信周期を指定します。
diff_drive_controllerのパラメータはraspimouse_control/config/raspimouse_control.yamlにて定義しています。
パラメータの詳しい情報はROS wikiの解説を参照してください。
-
diff_drive_controller/base_frame_idType:
stringodomとtfにてオドメトリのchild_frameとして設定するフレームの名前を指定します -
diff_drive_controller/odom_frame_idType:
stringオドメトリを配信する際のフレームの名前を指定します。
-
diff_drive_controller/left_wheelType:
string左の車輪のジョイント名を指定します。
-
diff_drive_controller/right_wheelType:
string右の車輪のジョイント名を指定します。
-
diff_drive_controller/enable_odom_tfType:
boolオドメトリをtfに配信するかどうかを指定します。
-
diff_drive_controller/wheel_radiusType:
doubleロボットのホイールの半径(単位 m)を指定します。
-
diff_drive_controller/wheel_separationType:
doubleロボットのホイールのトレッド(単位 m)を指定します。
License
(C) 2020-2022 RT Corporation
各ファイルはライセンスがファイル中に明記されている場合、そのライセンスに従います。特に明記されていない場合は、Apache License, Version 2.0に基づき公開されています。
ライセンスの全文はLICENSEまたはhttps://www.apache.org/licenses/LICENSE-2.0から確認できます。
※このソフトウェアは基本的にオープンソースソフトウェアとして「AS IS」(現状有姿のまま)で提供しています。本ソフトウェアに関する無償サポートはありません。
バグの修正や誤字脱字の修正に関するリクエストは常に受け付けていますが、それ以外の機能追加等のリクエストについては社内のガイドラインを優先します。
Acknowledgements
このソフトウェアはBSD 3-Clause Licenseで公開されているryuichiueda/raspimouse_ros_2をベースに開発されています。
Copyright (c) 2017, Ryuichi Ueda
サードパーティのOSS利用についての詳しい情報はOSSライセンスにもとづく表記を参照してください。