
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
Repository Summary
| Description | ros workspace for ur manipulator |
| Checkout URI | https://github.com/borninfreedom/ur_ws.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-08-03 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| controller_stopper | 0.0.1 |
| ur_calibration | 0.0.2 |
| ur_controllers | 0.0.2 |
| ur_dashboard_msgs | 0.0.0 |
| ur_robot_driver | 0.0.3 |
| universal_robot | 1.2.5 |
| universal_robots | 1.2.5 |
| ur10_e_moveit_config | 1.2.5 |
| ur10_moveit_config | 1.2.5 |
| ur3_e_moveit_config | 1.2.5 |
| ur3_moveit_config | 1.2.5 |
| ur5_e_moveit_config | 1.2.5 |
| ur5_moveit_config | 1.2.5 |
| ur_bringup | 1.2.5 |
| ur_description | 1.2.5 |
| ur_driver | 1.2.5 |
| ur_e_description | 1.2.5 |
| ur_e_gazebo | 1.2.5 |
| ur_gazebo | 1.2.5 |
| ur_kinematics | 1.2.5 |
| ur_msgs | 1.2.5 |
| gazebo_grasp_plugin | 1.0.2 |
| robotiq_85_bringup | 0.0.1 |
| robotiq_85_description | 0.0.1 |
| robotiq_85_driver | 0.0.1 |
| robotiq_85_gripper | 0.0.1 |
| robotiq_85_moveit_config | 0.2.0 |
| robotiq_85_msgs | 0.0.1 |
| roboticsgroup_gazebo_plugins | 0.0.1 |
| robotiq_85_gazebo | 1.0.0 |
| robotiq_85_simulation | 0.0.1 |
| si_utils | 0.0.1 |
| robotiq_ft_sensor | 1.0.0 |
| ur_platform_description | 1.2.1 |
| ur_platform_gazebo | 1.2.1 |
| ur_robotiq_manipulation | 1.0.0 |
| ur_platform_moveit_config | 0.3.0 |
README
Universal robot with robotiq hand workspace
** 如果想实现在网页端控制UR机械臂,请参考这两个仓库:UR3网页控制, UR5网页控制, UR3的是根据UR5的修改的,所以请先浏览UR5链接内的内容。** —
Build
source /opt/ros/kinetic/setup.bash
cd ur_ws/
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin build
- if rosdep init & rosdep update failed,please visit ROS -sudo rosdep init 失败解决方法
Run
source ~/ur_ws/devel/setup.bash
roslaunch ur_platform_gazebo ur_platform_gazebo.launch
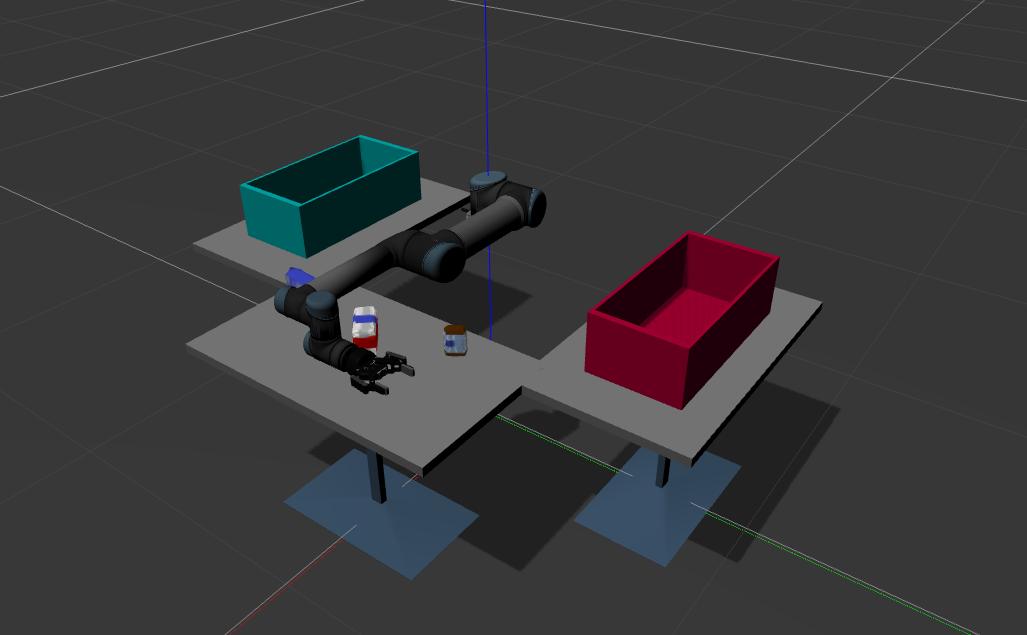
Grasp
The other terminal
rosrun ur_platform_manipulation grasp_object.py
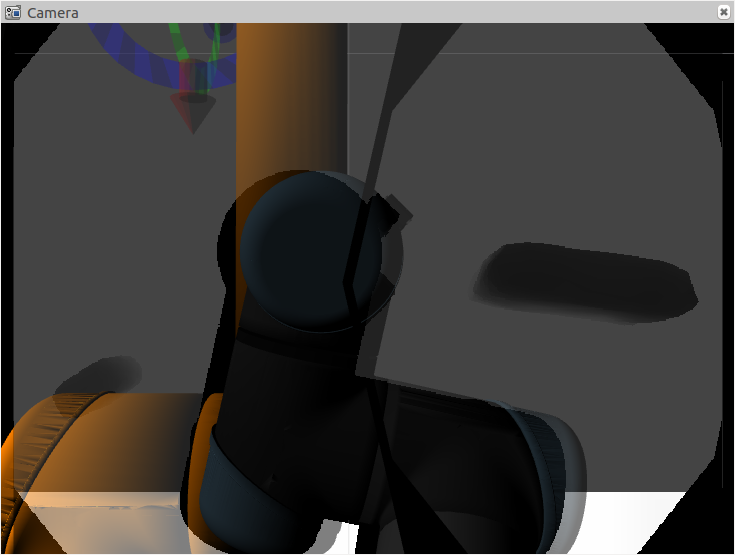
Camera Images
RGB image

Depth image
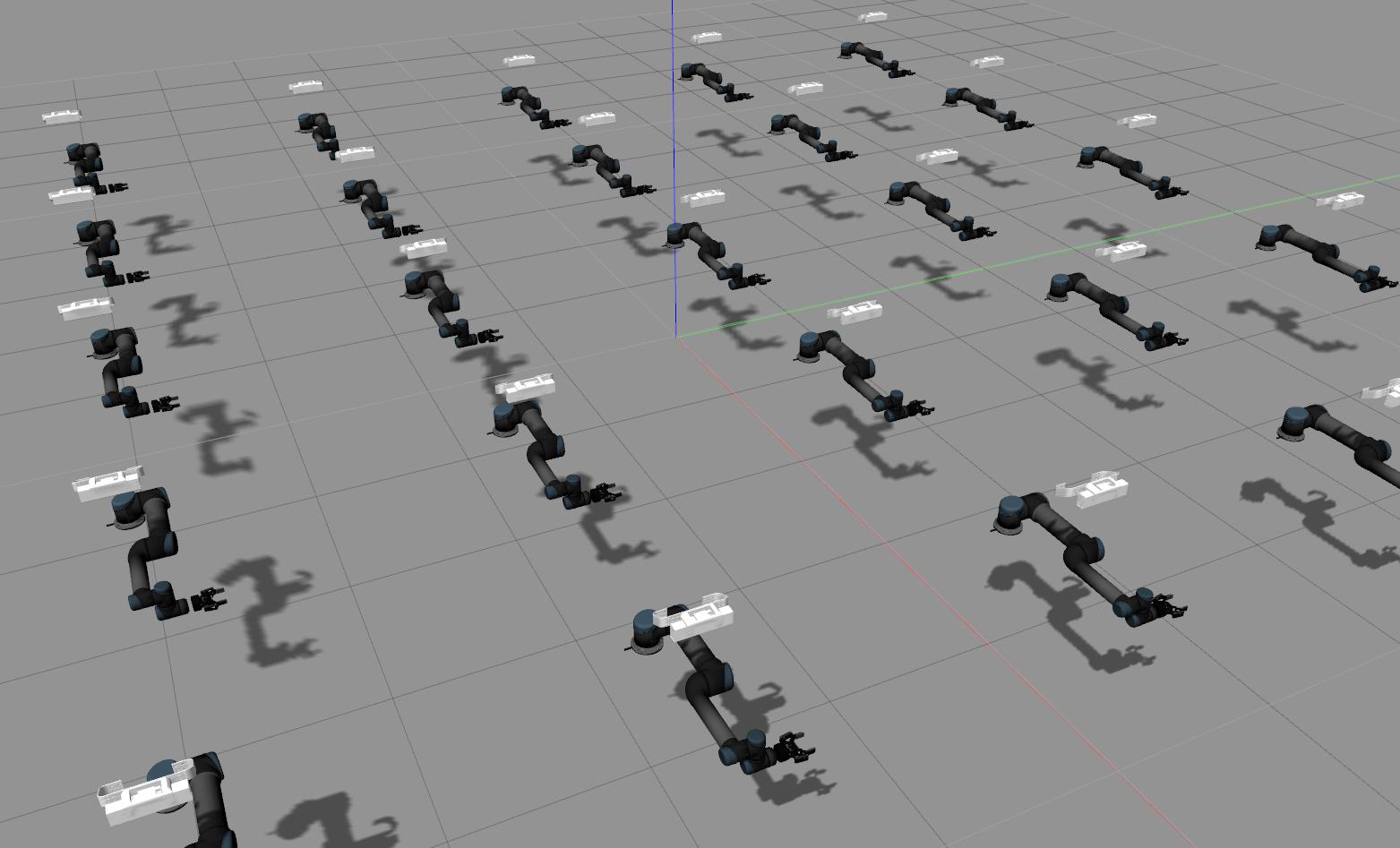
Multiple Arms
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.