
|
homing_local_planner package from homing_local_planner repohoming_local_planner |
Package Summary
| Tags | No category tags. |
| Version | 0.1.1 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | A simple, easy-to-use, and effective path tracking planner. |
| Checkout URI | https://github.com/zengxiaolei/homing_local_planner.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-06-29 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | planner robotics plugins ros-packages trajectory-tracking ros-navigation trajectory-planning movebase ros-noetic ros2-foxy webots-simulations ros2-humble |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Lei Zeng
Authors
- Lei Zeng
homing_local_planner ROS Package
A simple, easy-to-use, and effective path tracking planner with a complete demo.
The homing_local_planner package implements a plug-in to the nav_core::BaseLocalPlanner of the 2D navigation stack in ROS1 or a plug-in to the nav2_core::Controller of the Nav2 in ROS2. The underlying method called Homing Control has the objective to guide a robot along a reference path, which is a pure pursuit algorithm Implemented based on [1] as reference. And code implementation of the package has some reference to teb_local_planner.
This scheme considers a dynamic goal pose on the path located some distance ahead of the robots current pose. The robot is supposed to chase the moving goal pose (look-ahead pose) on the path. This path tracking strategy is similar to human drivers that steer a vehicle towards a dynamic lookahead point on the road, which distance depends on the vehicle speed, road curvature and visibility. The obstacle avoidance feature is currently not designed to allow for detours and exploration. When an obstacle appears on its planned path, the robot slows down or stops until the obstacle is cleared, just like a rail vehicle.
Install
Git clone this repository and checkout the corresponding branch, then compile.
cd ~/your_ws/src
git clone https://github.com/zengxiaolei/homing_local_planner.git
cd ..
colcon_build / catkin_make
Parameter
Robot:
- max_vel_x: maximum velocity in the x direction of the robot
- max_vel_theta: maximum angular velocity of the robot
- acc_lim_x: maximum translational acceleration of the robot
- acc_lim_theta: maximum angular acceleration of the robot
- min_turn_radius: minimum turning radius of the robot
- turn_around_priority: if true, the robot preferentially adjusts the orientation to fit the direction of the path
- stop_dist: When the Euclidean distance between the nearest lethal point on planned path and the robot frame origin is less than this distance, the robot stops
- dec_dist: When the Euclidean distance between the nearest lethal point on planned path and the robot frame origin is less than this distance, the robot slows down
Trajectory:
- max_global_plan_lookahead_dist: specify maximum length (cumulative Euclidean distances) of the subset of the global plan taken into account for optimization
- global_plan_viapoint_sep: min. separation between each two consecutive via-points extracted from the global plan
- global_plan_goal_sep: min. separation between the last via-point and goal pose
- global_plan_prune_distance: distance between robot and via_points of global plan which is used for pruning
Goal Tolerance:
- yaw_goal_tolerance: allowed final orientation(yaw) error
- xy_goal_tolerance: allowed final euclidean distance to the goal position
Optimization:
- k_rho: proportional parameter for linear velocity adjustment based on the Euclidean distance of the robot position to the current target
- k_alpha: proportional parameter for angular velocity adjustment based on the tangential angle of the target position in the robot’s frame of reference
- k_phi: proportional parameter for angular velocity adjustment based on the difference between the robot’s orientation(yaw) and the current target orientation(yaw)
Run and Demo
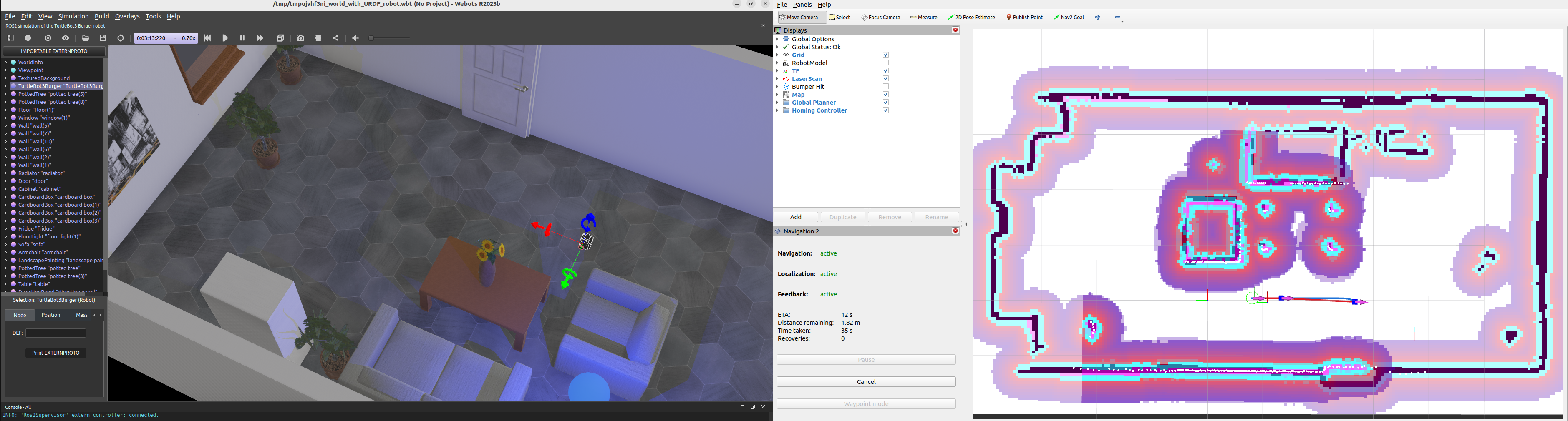
3D Webots Simulator for ROS2 Humble
Firstly make sure the simulation platform is installed.
webots installtion (ubuntu) in detail
Run
Then you can launch it easily by following command:
ros2 launch homing_local_planner robot_launch.py
Demo
The launchecd world is as follows:
2D Stage Simulator for ROS1 and ROS2 foxy
There’s a complete demo based on 2D stage simulator in this package. Firstly make sure the simulation platform is installed.
-
ROS2: stage_ros2
-
ROS1: stage_ros
Run
Then you can launch it easily by following command:
- For ROS2:
ros2 run stage_ros stageros /home/.../homing_local_planner/test/stage/maze_diff_drive.world
ros2 launch homing_local_planner demo.launch.py
- For ROS1:
roslaunch homing_local_planner demo.launch
Demo
Dyamic gif demo is as following.
If there’s a problem with display, you can check file path: /.README_img/homing_demo.gif
- Parking:
- Forward navigation:
- Navigation with direction adjustment and backwards:
References
[1] Astolfi, A., Exponential Stabilization of a Wheeled Mobile Robot Via Discontinuous Control, Journal of Dynamic Systems, Measurement, and Control, vol. 121, 1999
[2] C. Rösmann, F. Hoffmann and T. Bertram: Integrated online trajectory planning and optimization in distinctive topologies, Robotics and Autonomous Systems, Vol. 88, 2017, pp. 142–153.
[3] Mobile Robot Course of The Institute of Control Theory and Systems Engineering at TU Dortmund
License
The homing_local_planner package is licensed under the BSD 3-Clause license. It depends on other ROS packages, which are listed in the package.xml. They are also BSD licensed.
Some third-party dependencies are included that are licensed under different terms:
- Eigen, MPL2 license, http://eigen.tuxfamily.org
- Boost, Boost Software License, http://www.boost.org
All packages included are distributed in the hope that they will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^ Changelog for package homing_local_planner \^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^\^
0.1.1 (2023-11-02)
- All files added to the noetic-devel branch
- Initial commit
- Contributors: Lei Zeng
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| nav2_common | |
| nav2_core | |
| nav2_util | |
| nav2_costmap_2d | |
| rclcpp | |
| geometry_msgs | |
| nav2_msgs | |
| nav_msgs | |
| pluginlib | |
| tf2 | |
| visualization_msgs |