
|
sciurus17_examples package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | Sciurus17 ROS packages. |
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | robot ros gazebo sciurus17 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Hiroyuki Nomura
| English | 日本語 |
sciurus17_examples
Sciurus17のためのパッケージ、 sciurus17 で用いるサンプルをまとめたパッケージです。
システムの起動方法
Sciurus17の頭部カメラ、胸部カメラ、制御信号の各ケーブルを制御用パソコンへ接続します。
本体の電源をONにしカメラが接続されていることを確認します。
Terminalを開き、 sciurus17_bringup の sciurus17_bringup.launch を起動します。このlaunchファイルには次のオプションが用意されています。
- use_rviz (default: true)
Rvizを使用する/使用しない - use_head_camera (default: true)
頭部カメラを使用する/使用しない - use_chest_camera (default: true)
胸部カメラを使用する/使用しない
簡易シミュレータを使う場合
実機無しで動作を確認する場合、制御信号のケーブルを接続しない状態で次のコマンドを実行します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
物理演算やセンサを含めたシミュレーションは、 後述の「Gazeboを使う場合」の手順に従ってください。
実機を使う場合
実機で動作を確認する場合、制御信号のケーブルを接続し取り扱い説明書に従いモータパワーをONにした状態で次のコマンドを実行します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
カメラを使用しない場合
次のようにオプションを指定するとカメラを使用しない状態で起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch use_head_camera:=false use_chest_camera:=false
rvizを使用しない場合
次のようにオプションを指定するとrvizによる画面表示を使用しない状態で起動します。画面表示を省略することで制御用パソコンの負荷を下げることができます。
roslaunch sciurus17_bringup sciurus17_bringup.launch use_rviz:=false
Gazeboを使う場合
次のコマンドで起動します。実機との接続やsciurus17_bringupの実行は必要ありません。
roslaunch sciurus17_gazebo sciurus17_with_table.launch
# rvizを使用しない場合
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_rviz:=false
Run Examples
sciurus17_bringup.launchを実行している状態で各サンプルを実行できます。
- gripper_action_example
- neck_joint_trajectory_example
- waist_joint_trajectory_example
- pick_and_place_demo
- hand_position_publisher
- head_camera_tracking
- chest_camera_tracking
- depth_camera_tracking
- preset_pid_gain_example
- box_stacking_example
- current_control_right_arm
- current_control_left_wrist
gripper_action_example
両腕のハンドを開閉させるコード例です。
次のコマンドで26度まで開いて閉じる動作を実行します。
rosrun sciurus17_examples gripper_action_example.py
<img src= https://rt-net.github.io/images/sciurus17/gazebo_gripper_example.gif width=500px />
Videos


neck_joint_trajectory_example
首の角度を変更するコード例です。 次のコマンドで頭を上下左右へ向ける動作を実行します。
rosrun sciurus17_examples neck_joint_trajectory_example.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_neck_example.gif width = 500px />
Videos


waist_joint_trajectory_example
腰の角度を変更するコード例です。 次のコマンドで腰を左右へひねる動作を実行します。
rosrun sciurus17_examples waist_joint_trajectory_example.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_waist_example.gif width = 500px />
Videos

pick_and_place_demo
右手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。腰の回転も使用します。
rosrun sciurus17_examples pick_and_place_right_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_right.gif width = 500px />
左手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。
rosrun sciurus17_examples pick_and_place_left_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_left.gif width = 500px />
両手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。
rosrun sciurus17_examples pick_and_place_two_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_two.gif width = 500px />
Videos


hand_position_publisher
tfの機能でリンク位置を求めるノード例です。
l_link7とr_link7について、base_linkを基準とした座標をそれぞれ/sciurus17/hand_pos/leftトピックと
/sciurus17/hand_pos/rightトピックへ配信します。
次のコマンドでノードを起動します。
rosrun sciurus17_examples hand_position_publisher_example.py
head_camera_tracking
頭のカメラを使うコード例です。 OpenCVを使ってボール追跡と顔追跡をします。
次のコマンドでノードを起動します。
rosrun sciurus17_examples head_camera_tracking.py
ボール追跡をする場合
./scripts/head_camera_tracking.pyを編集します。
def _image_callback(self, ros_image):
# ~~~ 省略 ~~~
# オブジェクト(特定色 or 顔) の検出
output_image = self._detect_orange_object(input_image)
# output_image = self._detect_blue_object(input_image)
# output_image = self._detect_face(input_image)
<img src = https://rt-net.github.io/images/sciurus17/gazebo_head_camera.gif width = 500px />
顔追跡をする場合
./scripts/head_camera_tracking.pyを編集します。
顔追跡にはカスケード型分類器を使用します。
カスケードファイルのディレクトリを設定してください。 USER_NAME は環境に合わせて書き換えてください。
class ObjectTracker:
def __init__(self):
# ~~~ 省略 ~~~
# カスケードファイルの読み込み
# 例
# self._face_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_frontalface_alt2.xml")
# self._eyes_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_eye.xml")
self._face_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_frontalface_alt2.xml")
self._eyes_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_eye.xml")
def _image_callback(self, ros_image):
# ~~~ 省略 ~~~
# オブジェクト(特定色 or 顔) の検出
# output_image = self._detect_orange_object(input_image)
# output_image = self._detect_blue_object(input_image)
output_image = self._detect_face(input_image)
Videos
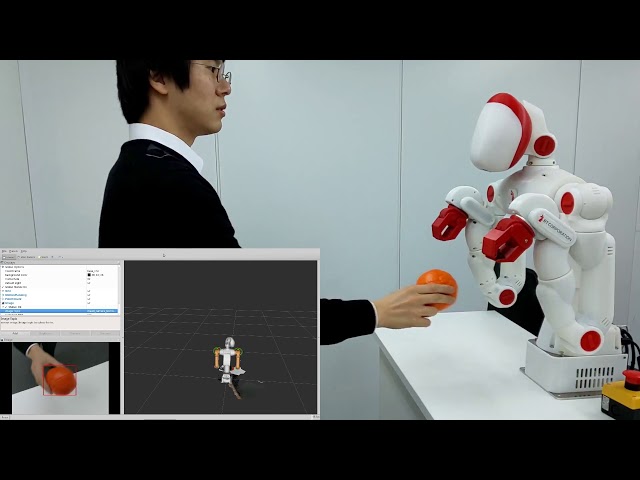
動画で使用しているボールは、アールティショップの こちらのページ で購入できます。
chest_camera_tracking
胸のカメラを使うコード例です。 OpenCVを使ってボール追跡をします。
次のコマンドでノードを起動します。
rosrun sciurus17_examples chest_camera_tracking.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_chest_camera.gif width = 500px />
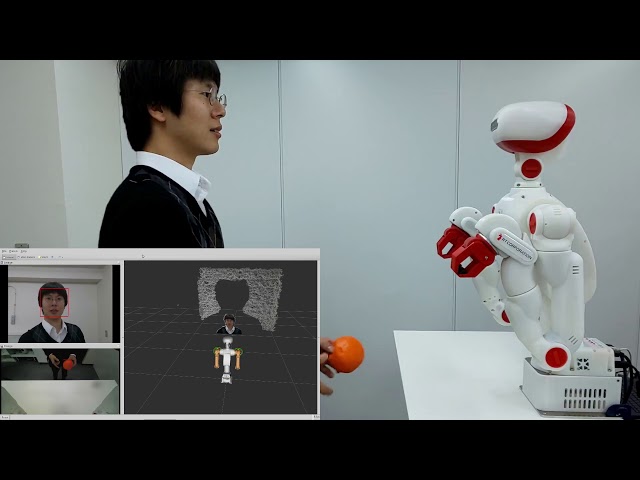
顔追跡とボール追跡の同時実行
頭カメラと胸のカメラの両方を使って、顔追跡とボール追跡をします。
rosrun sciurus17_examples head_camera_tracking.py
# 別のターミナルで実行
rosrun sciurus17_examples chest_camera_tracking.py
Videos

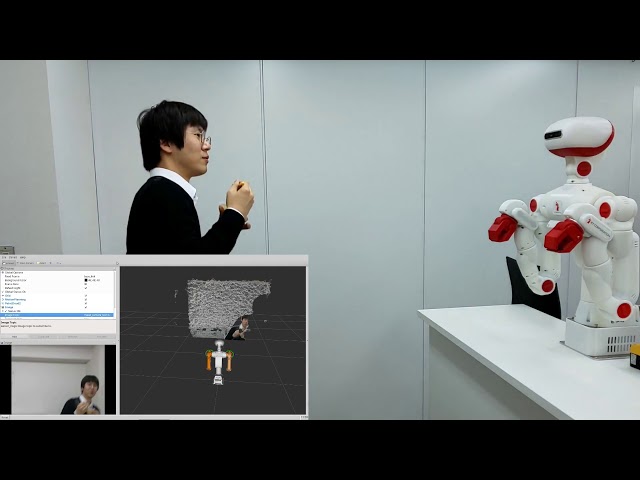
depth_camera_tracking
頭の深度カメラを使うコード例です。 指定深度内の物体を追跡します。
次のコマンドでノードを起動します。
rosrun sciurus17_examples depth_camera_tracking.py
デフォルトでは検出範囲を4段階に分けています。
検出範囲を変更する場合は./scripts/depth_camera_tracking.pyを編集します。
def _detect_object(self, input_depth_image):
# 検出するオブジェクトの大きさを制限する
MIN_OBJECT_SIZE = 10000 # px * px
MAX_OBJECT_SIZE = 80000 # px * px
# 検出範囲を4段階設ける
# 単位はmm
DETECTION_DEPTH = [
(500, 700),
(600, 800),
(700, 900),
(800, 1000)]
preset_pid_gain_example
sciurus17_controlのpreset_reconfigureを使うコード例です。
サーボモータのPIDゲインを一斉に変更できます。
プリセットはsciurus17_control/scripts/preset_reconfigure.py にて編集できます。
次のコマンドを実行すると、preset_reconfigure.pyとpreset_pid_gain_example.pyのノードを起動します。
roslaunch sciurus17_examples preset_pid_gain_example.launch
box_stacking_example
<img src = https://rt-net.github.io/images/sciurus17/gazebo_box_stacking.gif width = 500px />
PointCloudLibraryを用いて箱を検出し、箱を積み重ねるコード例です。
次のコマンドでノードを起動します。
roslaunch sciurus17_examples box_stacking_example.launch
RVizでvisualization_msgs/MarkerArrayの/sciurus17/example/markersを表示すると検出した箱を確認できます。
<img src = https://rt-net.github.io/images/sciurus17/rviz_box_stacking.png width = 500px />
Videos

current_control_right_arm
右腕を電流制御モードに変更して動かす方法を紹介します。
電流制御モードは、位置制御モードと異なり、サーボに設定された角度リミットが無効になります。 ユーザーの責任において十分に安全に注意した上でご使用下さい。 当該製品および当ソフトウェアの使用中に生じたいかなる損害も株式会社アールティでは一切の責任を負いかねます。
Ctrl+cでサンプルを終了する前に右腕を支えて下さい。
右腕が脱力したときに、腕が物にぶつかる可能性があります。
Gazeboで動かす場合
右腕のhardware_interfaceを変更するため、オプションを追加してGazeboを起動します。
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_effort_right_arm:=true
実機を動かす場合
実機を動かす前に、
Dynamixel Wizard 2.0
等のアプリケーションを用いて、
右腕のサーボモータ(ID2 ~ ID8)のOperating Modeを位置制御から電流制御に変更します。
※サーボモータの制御モード変更については sciurus17_controlのREADME も参照して下さい。
その後、 sciurus17_control/config/sciurus17_cotrol1.yaml を次のように編集します。
- コントローラの種類を
effort_controllers/JointTrajectoryControllerに変更。
right_arm_controller:
- type: "position_controllers/JointTrajectoryController"
+ type: "effort_controllers/JointTrajectoryController"
publish_rate: 500
- 制御モードを
3(位置制御)から0(電流制御)に変更。
- r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 }
- r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 }
- r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 }
- r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 }
- r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
- r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
- r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
+ r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 0 }
+ r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 0 }
+ r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 0 }
+ r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 0 }
+ r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
+ r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 0 }
+ r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
ファイル変更後に下記コマンドを実行し、sciurus17のノードを起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
コントローラのPIDゲインは、 sciurus17_control/config/sciurus17_cotrol1.yaml で設定されています。 Sciurus17の個体によっては目標姿勢に到達しなかったり、振動する場合があります。 適宜、PIDゲインを変更して下さい。
right_arm_controller:
type: "effort_controllers/JointTrajectoryController"
# --- 省略 ---
# for current control
gains:
r_arm_joint1: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint2: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint3: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint4: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint5: { p: 1.0, d: 0.1, i: 0.0 }
r_arm_joint6: { p: 1.0, d: 0.1, i: 0.0 }
r_arm_joint7: { p: 1.0, d: 0.1, i: 0.0 }
Videos
current_control_left_wrist
左手首を電流制御モードに変更して動かす方法を紹介します。
Gazeboで動かす場合
左手首のhardware_interfaceを変更するため、オプションを追加してGazeboを起動します。
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_effort_left_wrist:=true
実機を動かす場合
実機を動かす前に、
Dynamixel Wizard 2.0
等のアプリケーションを用いて、
左手首のサーボモータ(ID16)のOperating Modeを位置制御から電流制御に変更します。
その後、 sciurus17_control/config/sciurus17_cotrol2.yaml を次のように編集します。
- 手首ジョイントのコントローラを追加
goal_time: 0.0
stopped_velocity_tolerance: 1.0
+ left_wrist_controller:
+ type: "effort_controllers/JointEffortController"
+ joint: l_arm_joint7
+ pid: {p: 1.0, d: 0.0, i: 0.0}
left_hand_controller:
- 制御モードを
3(位置制御)から0(電流制御)に変更。
l_arm_joint6: {id: 15, center: 2048, home: 3413, effort_const: 1.79, mode: 3 }
- l_arm_joint7: {id: 16, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
l_hand_joint: {id: 17, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
l_arm_joint6: {id: 15, center: 2048, home: 3413, effort_const: 1.79, mode: 3 }
+ l_arm_joint7: {id: 16, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
l_hand_joint: {id: 17, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
最後に、 sciurus17_control/launch/controller2.launch を編集します。
<node name="controller_manager"
pkg="controller_manager"
type="spawner" respawn="false"
output="screen"
args="joint_state_controller
- left_arm_controller
+ left_wrist_controller
left_hand_controller"/>
ファイル変更後に下記コマンドを実行し、sciurus17のノードを起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
サンプルの実行
次のコマンドを実行すると、 左手首を±90度に変化させるサンプルプログラムが起動します。
rosrun sciurus17_examples control_effort_wrist.py
Videos

Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| sciurus17_moveit_config | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| pcl_conversions | |
| visualization_msgs | |
| geometry_msgs | |
| catkin | |
| moveit_commander | |
| cv_bridge |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 |
Messages
Services
Plugins
Recent questions tagged sciurus17_examples at Robotics Stack Exchange
|
|
sciurus17_examples package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | Sciurus17 ROS packages. |
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | robot ros gazebo sciurus17 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Hiroyuki Nomura
| English | 日本語 |
sciurus17_examples
Sciurus17のためのパッケージ、 sciurus17 で用いるサンプルをまとめたパッケージです。
システムの起動方法
Sciurus17の頭部カメラ、胸部カメラ、制御信号の各ケーブルを制御用パソコンへ接続します。
本体の電源をONにしカメラが接続されていることを確認します。
Terminalを開き、 sciurus17_bringup の sciurus17_bringup.launch を起動します。このlaunchファイルには次のオプションが用意されています。
- use_rviz (default: true)
Rvizを使用する/使用しない - use_head_camera (default: true)
頭部カメラを使用する/使用しない - use_chest_camera (default: true)
胸部カメラを使用する/使用しない
簡易シミュレータを使う場合
実機無しで動作を確認する場合、制御信号のケーブルを接続しない状態で次のコマンドを実行します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
物理演算やセンサを含めたシミュレーションは、 後述の「Gazeboを使う場合」の手順に従ってください。
実機を使う場合
実機で動作を確認する場合、制御信号のケーブルを接続し取り扱い説明書に従いモータパワーをONにした状態で次のコマンドを実行します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
カメラを使用しない場合
次のようにオプションを指定するとカメラを使用しない状態で起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch use_head_camera:=false use_chest_camera:=false
rvizを使用しない場合
次のようにオプションを指定するとrvizによる画面表示を使用しない状態で起動します。画面表示を省略することで制御用パソコンの負荷を下げることができます。
roslaunch sciurus17_bringup sciurus17_bringup.launch use_rviz:=false
Gazeboを使う場合
次のコマンドで起動します。実機との接続やsciurus17_bringupの実行は必要ありません。
roslaunch sciurus17_gazebo sciurus17_with_table.launch
# rvizを使用しない場合
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_rviz:=false
Run Examples
sciurus17_bringup.launchを実行している状態で各サンプルを実行できます。
- gripper_action_example
- neck_joint_trajectory_example
- waist_joint_trajectory_example
- pick_and_place_demo
- hand_position_publisher
- head_camera_tracking
- chest_camera_tracking
- depth_camera_tracking
- preset_pid_gain_example
- box_stacking_example
- current_control_right_arm
- current_control_left_wrist
gripper_action_example
両腕のハンドを開閉させるコード例です。
次のコマンドで26度まで開いて閉じる動作を実行します。
rosrun sciurus17_examples gripper_action_example.py
<img src= https://rt-net.github.io/images/sciurus17/gazebo_gripper_example.gif width=500px />
Videos
neck_joint_trajectory_example
首の角度を変更するコード例です。 次のコマンドで頭を上下左右へ向ける動作を実行します。
rosrun sciurus17_examples neck_joint_trajectory_example.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_neck_example.gif width = 500px />
Videos
waist_joint_trajectory_example
腰の角度を変更するコード例です。 次のコマンドで腰を左右へひねる動作を実行します。
rosrun sciurus17_examples waist_joint_trajectory_example.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_waist_example.gif width = 500px />
Videos
pick_and_place_demo
右手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。腰の回転も使用します。
rosrun sciurus17_examples pick_and_place_right_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_right.gif width = 500px />
左手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。
rosrun sciurus17_examples pick_and_place_left_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_left.gif width = 500px />
両手でターゲットを掴んで動かすデモ動作を次のコマンドで実行します。
rosrun sciurus17_examples pick_and_place_two_arm_demo.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_pick_and_place_two.gif width = 500px />
Videos
hand_position_publisher
tfの機能でリンク位置を求めるノード例です。
l_link7とr_link7について、base_linkを基準とした座標をそれぞれ/sciurus17/hand_pos/leftトピックと
/sciurus17/hand_pos/rightトピックへ配信します。
次のコマンドでノードを起動します。
rosrun sciurus17_examples hand_position_publisher_example.py
head_camera_tracking
頭のカメラを使うコード例です。 OpenCVを使ってボール追跡と顔追跡をします。
次のコマンドでノードを起動します。
rosrun sciurus17_examples head_camera_tracking.py
ボール追跡をする場合
./scripts/head_camera_tracking.pyを編集します。
def _image_callback(self, ros_image):
# ~~~ 省略 ~~~
# オブジェクト(特定色 or 顔) の検出
output_image = self._detect_orange_object(input_image)
# output_image = self._detect_blue_object(input_image)
# output_image = self._detect_face(input_image)
<img src = https://rt-net.github.io/images/sciurus17/gazebo_head_camera.gif width = 500px />
顔追跡をする場合
./scripts/head_camera_tracking.pyを編集します。
顔追跡にはカスケード型分類器を使用します。
カスケードファイルのディレクトリを設定してください。 USER_NAME は環境に合わせて書き換えてください。
class ObjectTracker:
def __init__(self):
# ~~~ 省略 ~~~
# カスケードファイルの読み込み
# 例
# self._face_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_frontalface_alt2.xml")
# self._eyes_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_eye.xml")
self._face_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_frontalface_alt2.xml")
self._eyes_cascade = cv2.CascadeClassifier("/home/USER_NAME/.local/lib/python2.7/site-packages/cv2/data/haarcascade_eye.xml")
def _image_callback(self, ros_image):
# ~~~ 省略 ~~~
# オブジェクト(特定色 or 顔) の検出
# output_image = self._detect_orange_object(input_image)
# output_image = self._detect_blue_object(input_image)
output_image = self._detect_face(input_image)
Videos
動画で使用しているボールは、アールティショップの こちらのページ で購入できます。
chest_camera_tracking
胸のカメラを使うコード例です。 OpenCVを使ってボール追跡をします。
次のコマンドでノードを起動します。
rosrun sciurus17_examples chest_camera_tracking.py
<img src = https://rt-net.github.io/images/sciurus17/gazebo_chest_camera.gif width = 500px />
顔追跡とボール追跡の同時実行
頭カメラと胸のカメラの両方を使って、顔追跡とボール追跡をします。
rosrun sciurus17_examples head_camera_tracking.py
# 別のターミナルで実行
rosrun sciurus17_examples chest_camera_tracking.py
Videos
depth_camera_tracking
頭の深度カメラを使うコード例です。 指定深度内の物体を追跡します。
次のコマンドでノードを起動します。
rosrun sciurus17_examples depth_camera_tracking.py
デフォルトでは検出範囲を4段階に分けています。
検出範囲を変更する場合は./scripts/depth_camera_tracking.pyを編集します。
def _detect_object(self, input_depth_image):
# 検出するオブジェクトの大きさを制限する
MIN_OBJECT_SIZE = 10000 # px * px
MAX_OBJECT_SIZE = 80000 # px * px
# 検出範囲を4段階設ける
# 単位はmm
DETECTION_DEPTH = [
(500, 700),
(600, 800),
(700, 900),
(800, 1000)]
preset_pid_gain_example
sciurus17_controlのpreset_reconfigureを使うコード例です。
サーボモータのPIDゲインを一斉に変更できます。
プリセットはsciurus17_control/scripts/preset_reconfigure.py にて編集できます。
次のコマンドを実行すると、preset_reconfigure.pyとpreset_pid_gain_example.pyのノードを起動します。
roslaunch sciurus17_examples preset_pid_gain_example.launch
box_stacking_example
<img src = https://rt-net.github.io/images/sciurus17/gazebo_box_stacking.gif width = 500px />
PointCloudLibraryを用いて箱を検出し、箱を積み重ねるコード例です。
次のコマンドでノードを起動します。
roslaunch sciurus17_examples box_stacking_example.launch
RVizでvisualization_msgs/MarkerArrayの/sciurus17/example/markersを表示すると検出した箱を確認できます。
<img src = https://rt-net.github.io/images/sciurus17/rviz_box_stacking.png width = 500px />
Videos
current_control_right_arm
右腕を電流制御モードに変更して動かす方法を紹介します。
電流制御モードは、位置制御モードと異なり、サーボに設定された角度リミットが無効になります。 ユーザーの責任において十分に安全に注意した上でご使用下さい。 当該製品および当ソフトウェアの使用中に生じたいかなる損害も株式会社アールティでは一切の責任を負いかねます。
Ctrl+cでサンプルを終了する前に右腕を支えて下さい。
右腕が脱力したときに、腕が物にぶつかる可能性があります。
Gazeboで動かす場合
右腕のhardware_interfaceを変更するため、オプションを追加してGazeboを起動します。
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_effort_right_arm:=true
実機を動かす場合
実機を動かす前に、
Dynamixel Wizard 2.0
等のアプリケーションを用いて、
右腕のサーボモータ(ID2 ~ ID8)のOperating Modeを位置制御から電流制御に変更します。
※サーボモータの制御モード変更については sciurus17_controlのREADME も参照して下さい。
その後、 sciurus17_control/config/sciurus17_cotrol1.yaml を次のように編集します。
- コントローラの種類を
effort_controllers/JointTrajectoryControllerに変更。
right_arm_controller:
- type: "position_controllers/JointTrajectoryController"
+ type: "effort_controllers/JointTrajectoryController"
publish_rate: 500
- 制御モードを
3(位置制御)から0(電流制御)に変更。
- r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 }
- r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 }
- r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 }
- r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 }
- r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
- r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
- r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
+ r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 0 }
+ r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 0 }
+ r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 0 }
+ r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 0 }
+ r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
+ r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 0 }
+ r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
ファイル変更後に下記コマンドを実行し、sciurus17のノードを起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
コントローラのPIDゲインは、 sciurus17_control/config/sciurus17_cotrol1.yaml で設定されています。 Sciurus17の個体によっては目標姿勢に到達しなかったり、振動する場合があります。 適宜、PIDゲインを変更して下さい。
right_arm_controller:
type: "effort_controllers/JointTrajectoryController"
# --- 省略 ---
# for current control
gains:
r_arm_joint1: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint2: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint3: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint4: { p: 5.0, d: 0.1, i: 0.0 }
r_arm_joint5: { p: 1.0, d: 0.1, i: 0.0 }
r_arm_joint6: { p: 1.0, d: 0.1, i: 0.0 }
r_arm_joint7: { p: 1.0, d: 0.1, i: 0.0 }
Videos
current_control_left_wrist
左手首を電流制御モードに変更して動かす方法を紹介します。
Gazeboで動かす場合
左手首のhardware_interfaceを変更するため、オプションを追加してGazeboを起動します。
roslaunch sciurus17_gazebo sciurus17_with_table.launch use_effort_left_wrist:=true
実機を動かす場合
実機を動かす前に、
Dynamixel Wizard 2.0
等のアプリケーションを用いて、
左手首のサーボモータ(ID16)のOperating Modeを位置制御から電流制御に変更します。
その後、 sciurus17_control/config/sciurus17_cotrol2.yaml を次のように編集します。
- 手首ジョイントのコントローラを追加
goal_time: 0.0
stopped_velocity_tolerance: 1.0
+ left_wrist_controller:
+ type: "effort_controllers/JointEffortController"
+ joint: l_arm_joint7
+ pid: {p: 1.0, d: 0.0, i: 0.0}
left_hand_controller:
- 制御モードを
3(位置制御)から0(電流制御)に変更。
l_arm_joint6: {id: 15, center: 2048, home: 3413, effort_const: 1.79, mode: 3 }
- l_arm_joint7: {id: 16, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
l_hand_joint: {id: 17, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
l_arm_joint6: {id: 15, center: 2048, home: 3413, effort_const: 1.79, mode: 3 }
+ l_arm_joint7: {id: 16, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
l_hand_joint: {id: 17, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
最後に、 sciurus17_control/launch/controller2.launch を編集します。
<node name="controller_manager"
pkg="controller_manager"
type="spawner" respawn="false"
output="screen"
args="joint_state_controller
- left_arm_controller
+ left_wrist_controller
left_hand_controller"/>
ファイル変更後に下記コマンドを実行し、sciurus17のノードを起動します。
roslaunch sciurus17_bringup sciurus17_bringup.launch
サンプルの実行
次のコマンドを実行すると、 左手首を±90度に変化させるサンプルプログラムが起動します。
rosrun sciurus17_examples control_effort_wrist.py
Videos
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| sciurus17_moveit_config | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| pcl_conversions | |
| visualization_msgs | |
| geometry_msgs | |
| catkin | |
| moveit_commander | |
| cv_bridge |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 |