
|
rfuniverse repositorysimulator schunk_svh_description sr_grasp_description tobor_description sr_description ur_description yumi_description |
|
|
Repository Summary
| Description | Robot physics simulation and RL platform based on Unity / 基于Unity的机器人物理仿真和RL平台 |
| Checkout URI | https://github.com/robotflow-initiative/rfuniverse.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-02-28 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | simulator |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| schunk_svh_description | 0.0.0 |
| sr_grasp_description | 0.0.1 |
| tobor_description | 0.0.0 |
| sr_description | 1.4.0 |
| ur_description | 1.3.1 |
| yumi_description | 0.0.4 |
README

RFUniverse is a platform developed in Unity for robot simulation and reinforcement learning, consisting of three main functional modules:
Python API:Python communication interface
Unity Player:Receiving messages from Python and executing simulations
Unity EditMode:Used for building or editing simulation scenes. This code is located in a submodule
Follow the steps below to configure and run example scenes through the release version
- Create a new conda environment and install pyrfuniverse
conda create -n rfuniverse python=3.10 -y
conda activate rfuniverse
pip install pyrfuniverse
-
Download the RFUniverse simulation environment
Option 1: Use the pyrfuniverse command line entry
pyrfuniverse download
By default, it downloads the latest available version to ~/rfuniverse, you can add the optional argument -s to change the download path, -v to change the download version
Option 2: Download from Github Release: RFUniverse Releases
After downloading and unzipping, run the program once, and you can close it after entering the scene:
Linux: RFUniverse_For_Linux/RFUniverse.x86_64
Windows: RFUniverse_For_Windows/RFUniverse.exe
- Install the test package pyrfuniverse-test and run the example script
pip install pyrfuniverse-test
pyrfuniverse-test test_pick_and_place
More examples can be viewed with pyrfuniverse-test -h
Additional operations that may be required on Linux systems:
If an error occurs during runtime, please check this document to supplement dependencies
Test Directory
| Script Name | Function Introduction | Preview |
|---|---|---|
| test_active_depth | Infrared Depth |
|
| test_articulation_ik | Native IK | 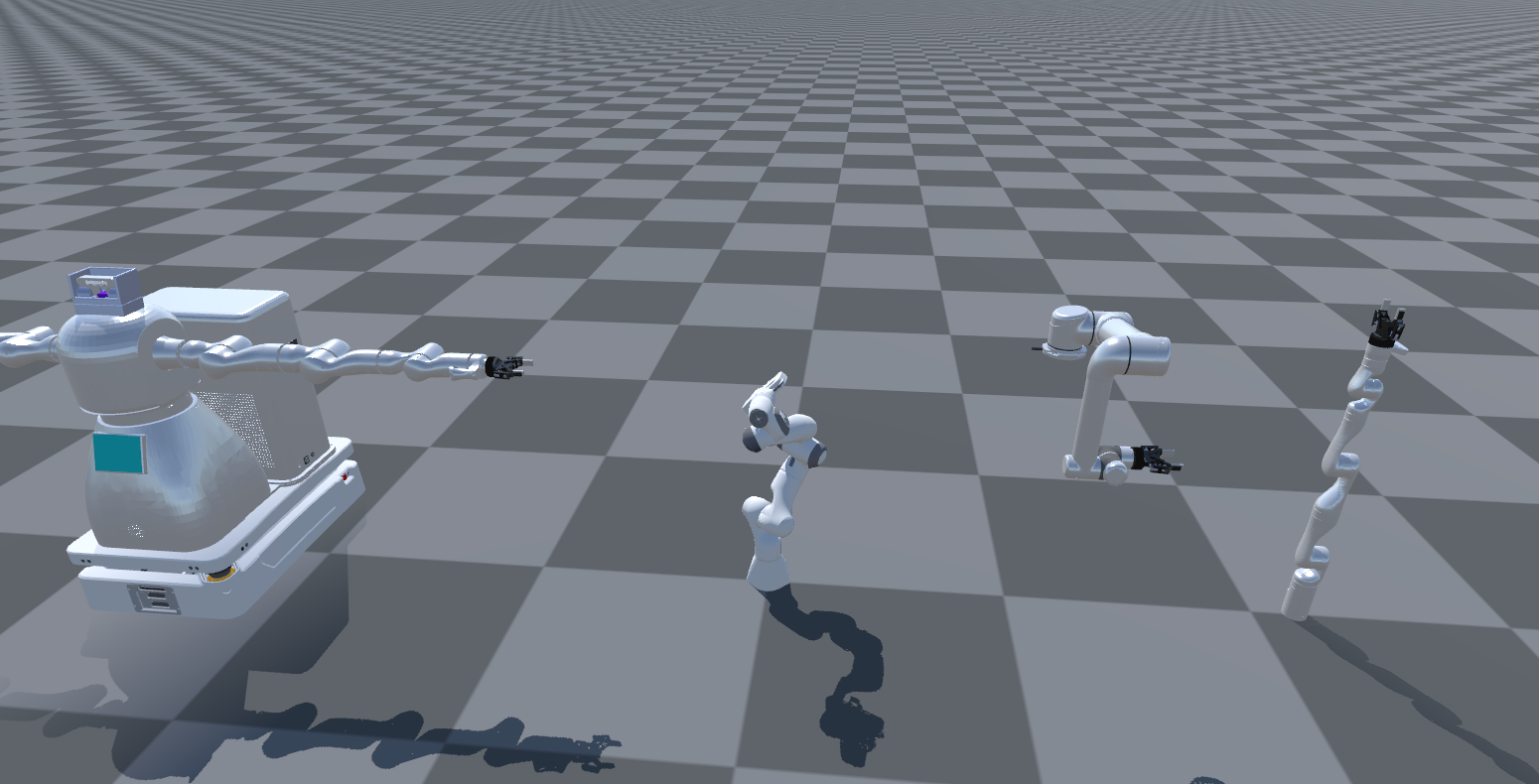 |
| test_camera_image | Camera Screenshot Example | |
| test_custom_message | Custom Messages and Dynamic Messages | |
| test_debug | Loop Display of Various Debug Modules |
|
| test_digit | Interactive Digit Tactile Sensor Simulation |  |
| test_gelslim | GelSlim tactile sensor simulation |
|
| test_grasp_sim | Franka Grasping Test |  |
| test_grasp_pose | Franka Grasp Point Preview | |
| test_heat_map | Interactive Heatmap | 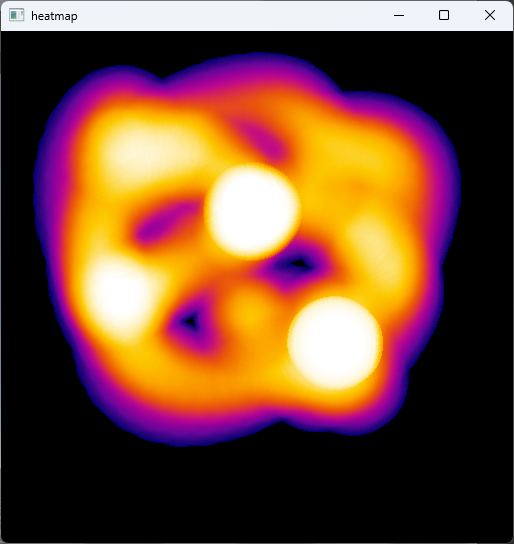 |
| test_cloth_attach | Cloth Simulation | |
| test_humanbody_ik | Human Body IK Interface | |
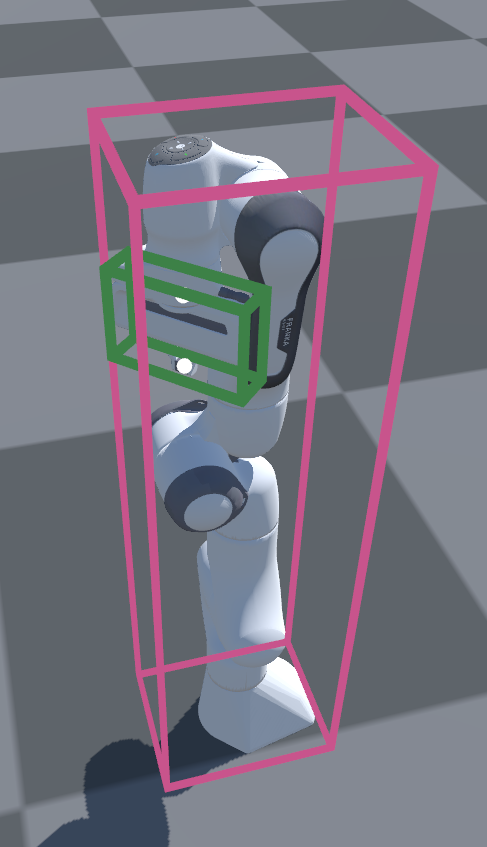
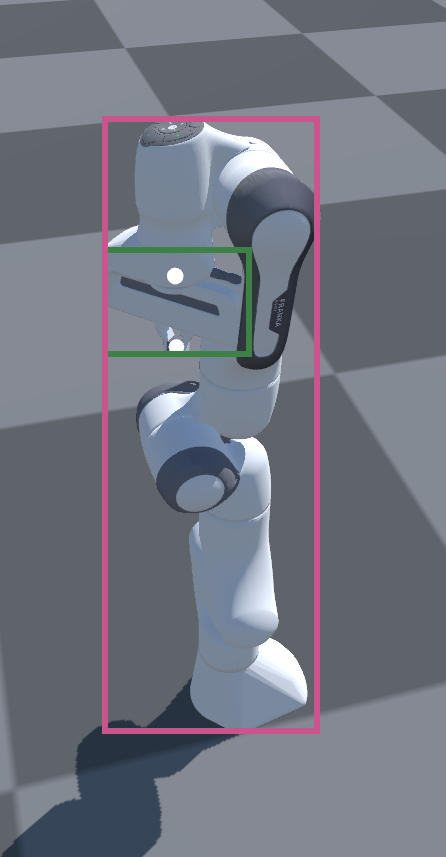
| test_label | Scene Labeling 2DBBOX |
 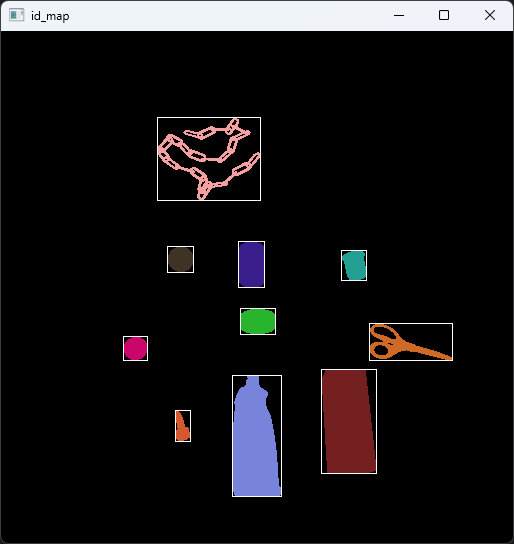
|
| test_ligth | Lighting Parameter Settings | |
| test_load_mesh | Importing OBJ Model as Rigid Body | |
| test_load_urdf | Importing URDF File | |
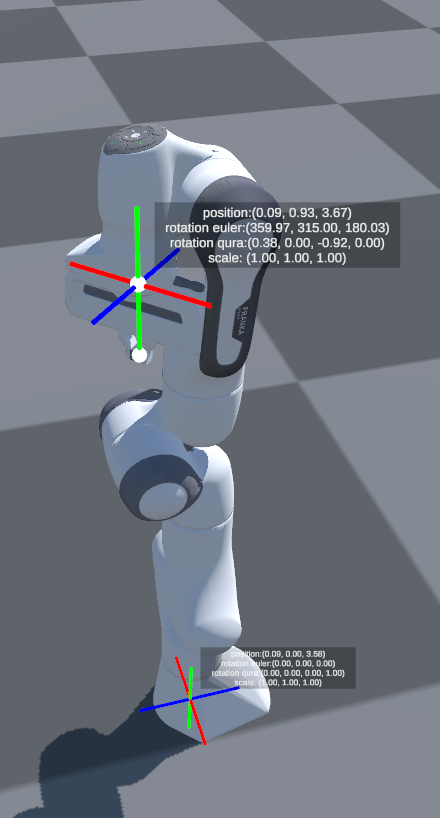
| test_object_data | Object Basic Data | |
| test_pick_and_place | Basic Interface and Grasping Driven by Native IK |  |
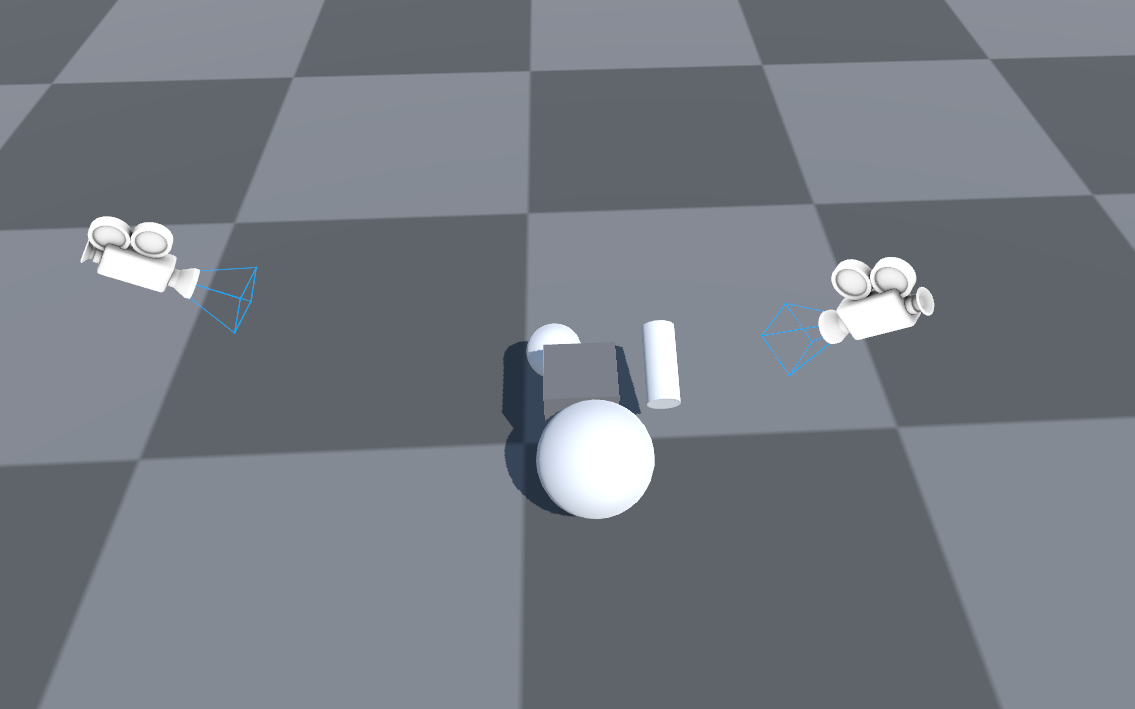
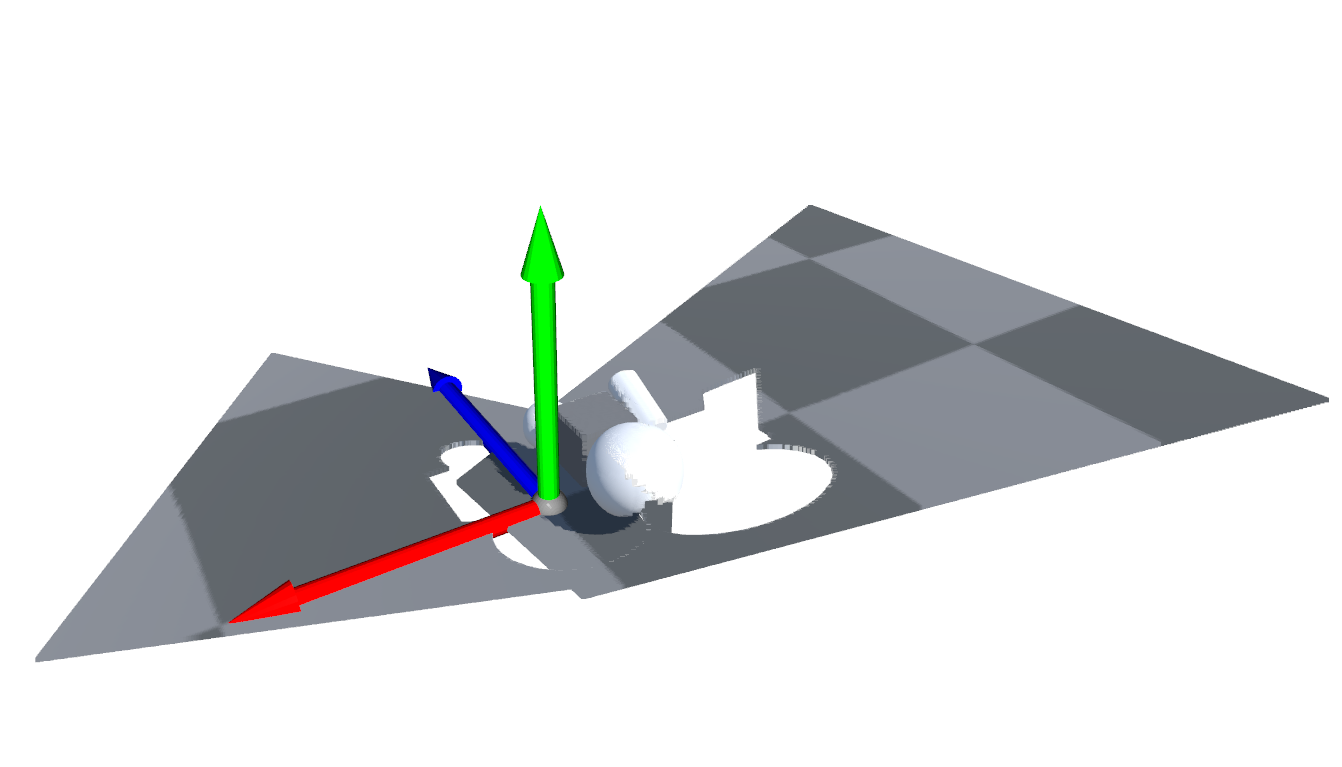
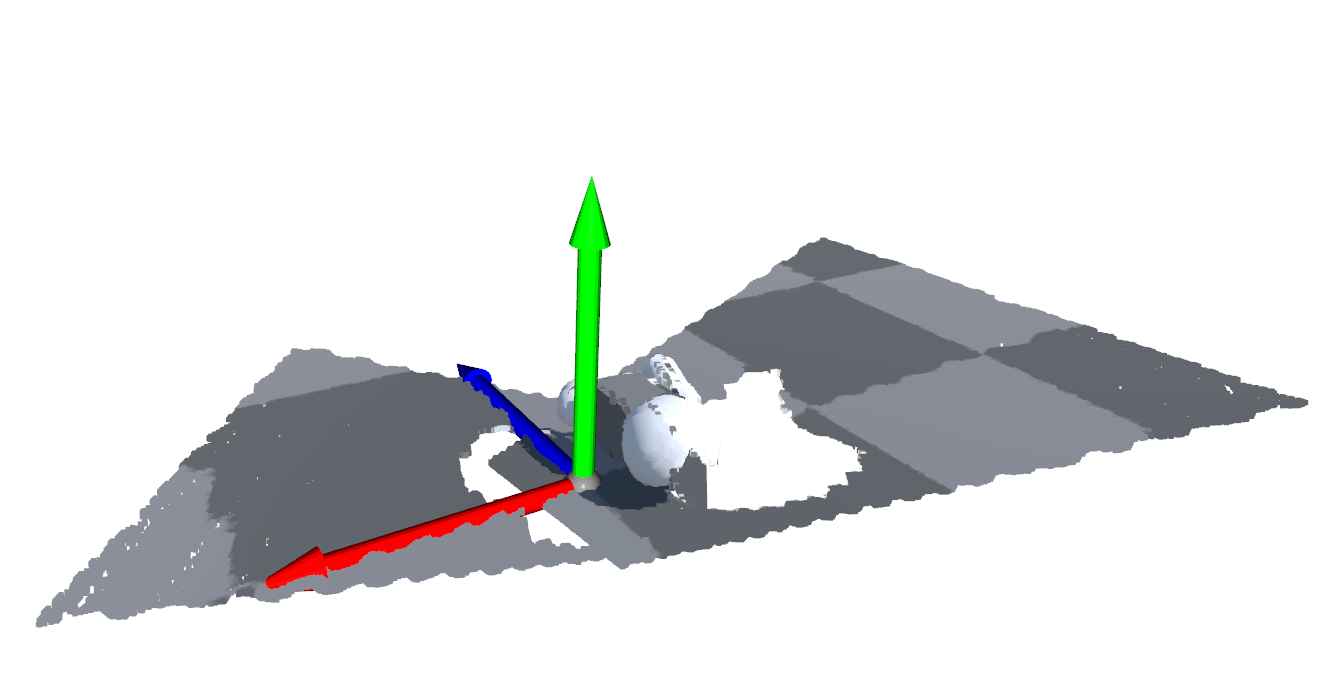
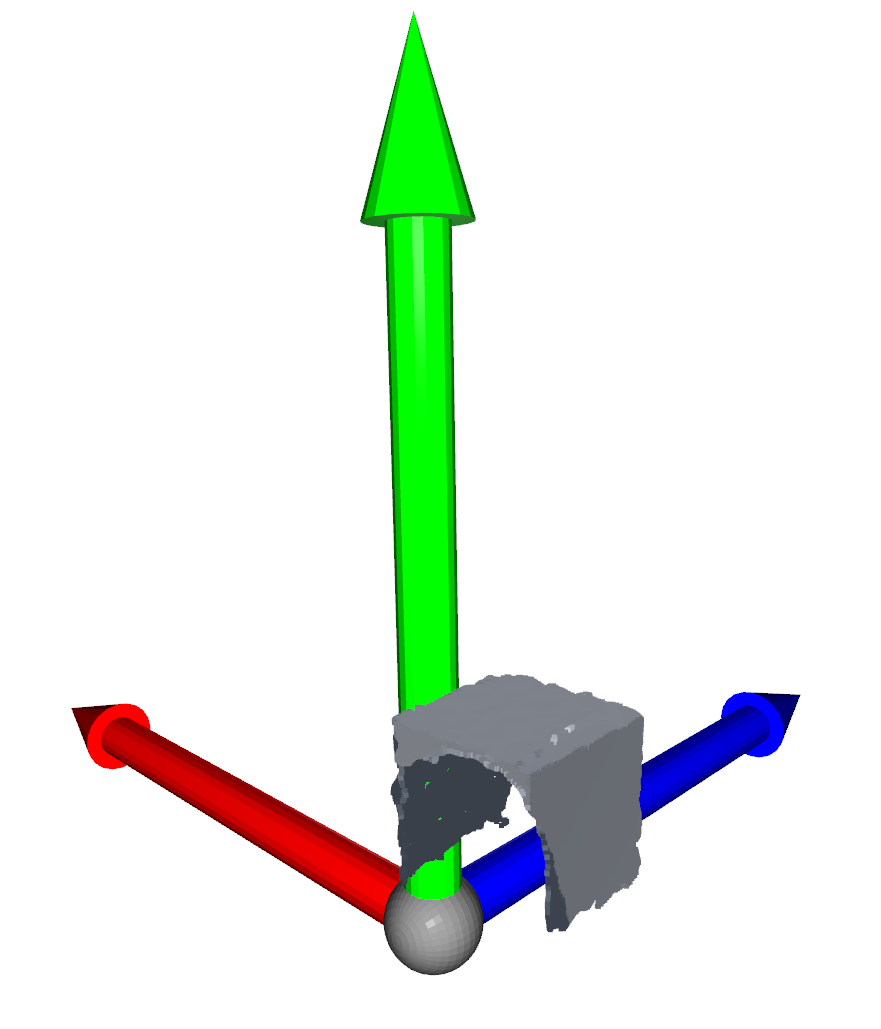
| test_point_cloud | Obtaining Depth Image and Converting to Point Cloud Using Image Width, Height, and FOV | |
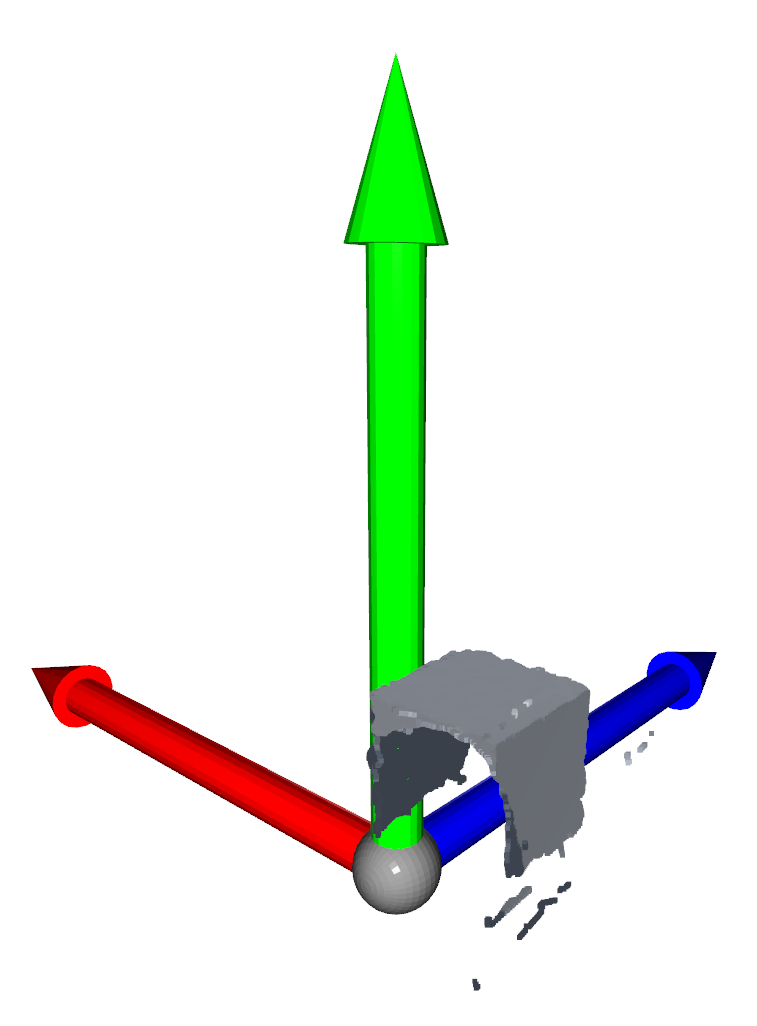
| test_point_cloud_render | Importing and Displaying .PLY Point Cloud File | |
| test_point_cloud_with_intrinsic_matrix | Obtaining Depth Image and Converting to Point Cloud Using Camera Intrinsic Matrix | |
| test_save_gripper | Saving Gripper as OBJ Model | |
| test_save_obj | Saving Multiple Objects in the Scene as OBJ Models | |
| test_scene | Scene Building/Saving/Loading | |
| test_tobor_move | Tobor Wheel Drive Movement | |
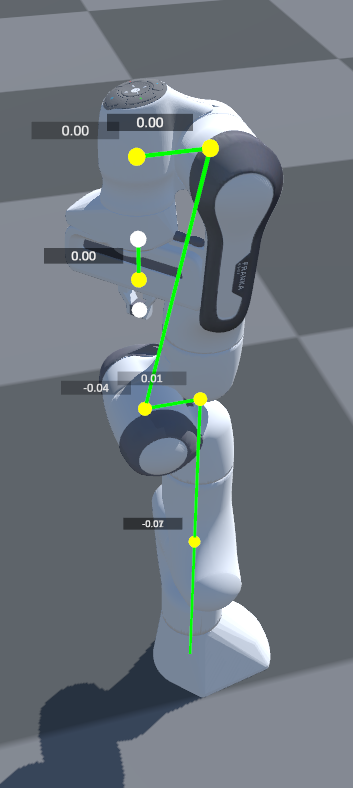
| test_urdf_parameter | Joint Target Position Setting Panel | 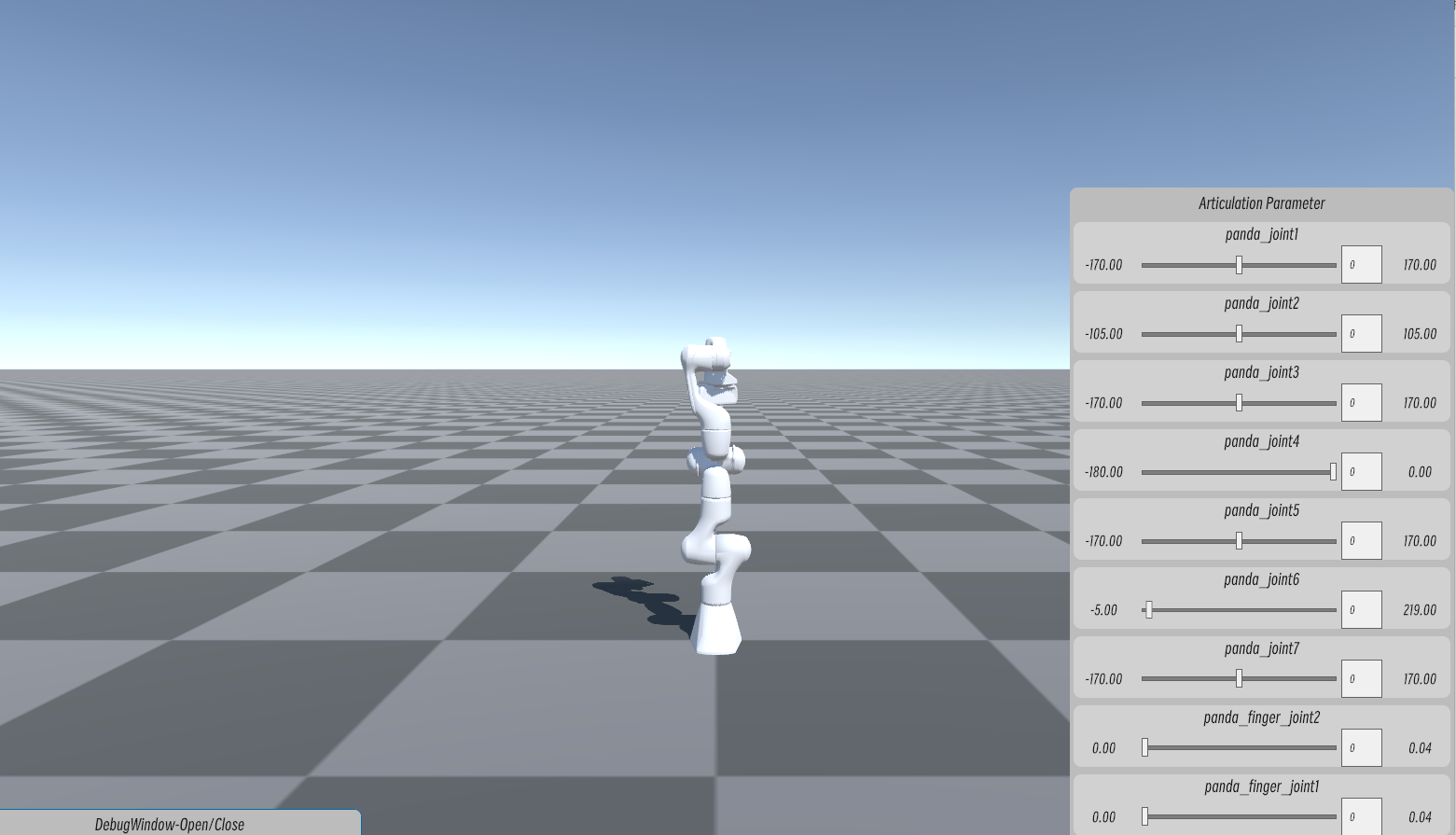 |
| test_ompl | Robotic Arm Obstacle Avoidance Planning This example requires Linux and self-installation of OMPL |
 |
Enter Edit mode
Launch RFUniverse with the <-edit> parameter to enter Edit mode:
Linux:
RFUniverse.x86_64 -edit
Windows:
RFUniverse.exe -edit