Package Summary
| Tags | No category tags. |
| Version | 0.244.19 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Integration between ROS (1 and 2) and Gazebo simulation |
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-05-26 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | cpp robotics simulation pubsub ros transport gazebo ignition-transport hacktoberfest ros2 ignition robotics-simulation gazebosim ignition-gazebo |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Brandon Ong
Authors
This is a shim package
For ros_gz_bridge
Changelog for package ros_ign_bridge
0.244.19 (2025-05-26)
0.244.18 (2025-05-23)
0.244.17 (2025-05-06)
0.244.16 (2024-07-22)
0.244.15 (2024-07-03)
0.244.14 (2024-04-08)
0.244.13 (2024-01-23)
0.244.12 (2023-12-13)
0.244.11 (2023-05-23)
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge branch 'ros2' into ports/galactic_to_ros2
- Merge branch 'galactic' into ports/galactic_to_ros2
- Make tests faster and more robust (#272)
- Improve documentation around yaml configuration (#271)
- Fix small typo in bridge README (#270)
- Port NavSat (#224) from ROS 1 to ROS 2 (#268) Co-authored-by: Tyler Howell <<76003804+TyHowellWork@users.noreply.github.com>>
- Add ParamVec and bridge from Ignition
(#261)
- Introduces [ros_ign_interfaces::msg::ParamVec]{.title-ref} for storing a list of Parameters that are int, bool, double, or string.
- Introduces bridge for [ignition::msgs::param]{.title-ref} to [ros_ign_interfaces::msg::ParamVec]{.title-ref}
- Introduces bridge for [ignition::msgs::param_v]{.title-ref} to [ros_ign_interfaces::msg::ParamVec]{.title-ref}
- Add support for converting Any <-> ParamValue
(#260)
- Add support for converting Any <-> ParamValue
- Feature: set QoS options to override durability (#250) (#259) Co-authored-by: Louise Poubel <<louise@openrobotics.org>> Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>>
- Add node component and yaml-configured bridge node
(#238)
- Refactor in support of adding yaml-configured node
- Add rssi to Dataframe.msg
(#249)
- Adding rssi field to ros_ign_interfaces/Dataframe.msg
- Use the python generator for tests as well
(#234)
- Use the python generator for tests as well
- Generate boilerplate files from Python scripts (#233) The way that we add factories can be a bit error-prone, as there are a lot of strings that cannot be checked at compilation time. This changes several of the boilerplate files to be generated automatically by python scripts, in line with how ros1_bridge does it.
- [galactic] Backport GuiCamera, StringVec, TrackVisual, VideoRecord
(#241)
- [ros_ign_interfaces] Add more interface definitions.
- Add conversion functions for the added messages
- Update the factory factory function with the new messages
- Add new messages to docs
* Add test cases for the new messages conversions Co-authored-by: Ivan Santiago Paunovic <<ivanpauno@ekumenlabs.com>>
- Add Dataframe message and bridging (#239)
- Factory interface needs virtual destructor (#232)
- Optional "lazy" bridge subscribers
(#225) This
allows for the bridge to be created in such a way that it is
"lazy". In this case "lazy" means:
- The publication (output) side of the bridge is always on and actively looking for subscriptions.
- The subscription (input) side of the bridge is only turned on in the case that there are subscriptions on the output side.
- Contributors: Carlos Agüero, Louise Poubel, Michael Carroll
0.244.6 (2022-09-14)
- Restructured directories (#296)
- Contributors: Alejandro Hernández Cordero
0.244.5 (2022-09-12)
- ign -> gz : ros_gz Migration (Shims) (#281) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: methylDragon
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_index_cpp | |
| ros_gz_bridge |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros_ign_bridge at Robotics Stack Exchange

|
ros_ign_bridge package from ros_ign reporos_ign ros_ign_bridge ros_ign_gazebo ros_ign_gazebo_demos ros_ign_image ros_ign_point_cloud |
Package Summary
| Tags | No category tags. |
| Version | 0.111.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | Integration between ROS (1 and 2) and Gazebo simulation |
| Checkout URI | https://github.com/ignitionrobotics/ros_ign.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2023-03-08 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | cpp robotics simulation pubsub ros transport gazebo ignition-transport hacktoberfest ros2 ignition robotics-simulation gazebosim ignition-gazebo |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Carlos Agüero
Authors
Bridge communication between ROS and Ignition Transport
This package provides a network bridge which enables the exchange of messages between ROS and Ignition Transport.
The bridge is currently implemented in C++. At this point there’s no support for service calls. Its support is limited to only the following message types:
| ROS type | Ignition Transport type |
|---|---|
| std_msgs/Bool | ignition::msgs::Boolean |
| std_msgs/ColorRGBA | ignition::msgs::Color |
| std_msgs/Empty | ignition::msgs::Empty |
| std_msgs/Int32 | ignition::msgs::Int32 |
| std_msgs/Float32 | ignition::msgs::Float |
| std_msgs/Float64 | ignition::msgs::Double |
| std_msgs/Header | ignition::msgs::Header |
| std_msgs/String | ignition::msgs::StringMsg |
| geometry_msgs/Quaternion | ignition::msgs::Quaternion |
| geometry_msgs/Vector3 | ignition::msgs::Vector3d |
| geometry_msgs/Point | ignition::msgs::Vector3d |
| geometry_msgs/Pose | ignition::msgs::Pose |
| geometry_msgs/PoseArray | ignition::msgs::Pose_V |
| geometry_msgs/PoseStamped | ignition::msgs::Pose |
| geometry_msgs/Transform | ignition::msgs::Pose |
| geometry_msgs/TransformStamped | ignition::msgs::Pose |
| geometry_msgs/Twist | ignition::msgs::Twist |
| mav_msgs/Actuators (not on Noetic) | ignition::msgs::Actuators |
| nav_msgs/OccupancyGrid | ignition::msgs::OccupancyGrid |
| nav_msgs/Odometry | ignition::msgs::Odometry |
| rosgraph_msgs/Clock | ignition::msgs::Clock |
| sensor_msgs/BatteryState | ignition::msgs::BatteryState |
| sensor_msgs/CameraInfo | ignition::msgs::CameraInfo |
| sensor_msgs/FluidPressure | ignition::msgs::FluidPressure |
| sensor_msgs/Imu | ignition::msgs::IMU |
| sensor_msgs/Image | ignition::msgs::Image |
| sensor_msgs/JointState | ignition::msgs::Model |
| sensor_msgs/LaserScan | ignition::msgs::LaserScan |
| sensor_msgs/MagneticField | ignition::msgs::Magnetometer |
| sensor_msgs/NavSatFix | ignition::msgs::NavSat |
| sensor_msgs/PointCloud2 | ignition::msgs::PointCloudPacked |
| tf_msgs/TFMessage | ignition::msgs::Pose_V |
| visualization_msgs/Marker | ignition::msgs::Marker |
| visualization_msgs/MarkerArray | ignition::msgs::Marker_V |
Run rosmaster & rosrun ros_ign_bridge parameter_bridge -h for instructions.
Example 1a: Ignition Transport talker and ROS listener
First we start a ROS roscore:
# Shell A:
. /opt/ros/noetic/setup.bash
roscore
Then we start the parameter bridge which will watch the specified topics.
# Shell B:
. ~/bridge_ws/install/setup.bash
rosrun ros_ign_bridge parameter_bridge /chatter@std_msgs/String@ignition.msgs.StringMsg
Now we start the ROS listener.
# Shell C:
. /opt/ros/noetic/setup.bash
rostopic echo /chatter
Now we start the Ignition Transport talker.
# Shell D:
ign topic -t /chatter -m ignition.msgs.StringMsg -p 'data:"Hello"'
Example 1b: ROS talker and Ignition Transport listener
First we start a ROS roscore:
# Shell A:
. /opt/ros/noetic/setup.bash
roscore
Then we start the parameter bridge which will watch the specified topics.
# Shell B:
. ~/bridge_ws/install/setup.bash
rosrun ros_ign_bridge parameter_bridge /chatter@std_msgs/String@ignition.msgs.StringMsg
Now we start the Ignition Transport listener.
# Shell C:
ign topic -e -t /chatter
Now we start the ROS talker.
# Shell D:
. /opt/ros/noetic/setup.bash
rostopic pub /chatter std_msgs/String "data: 'Hi'" --once
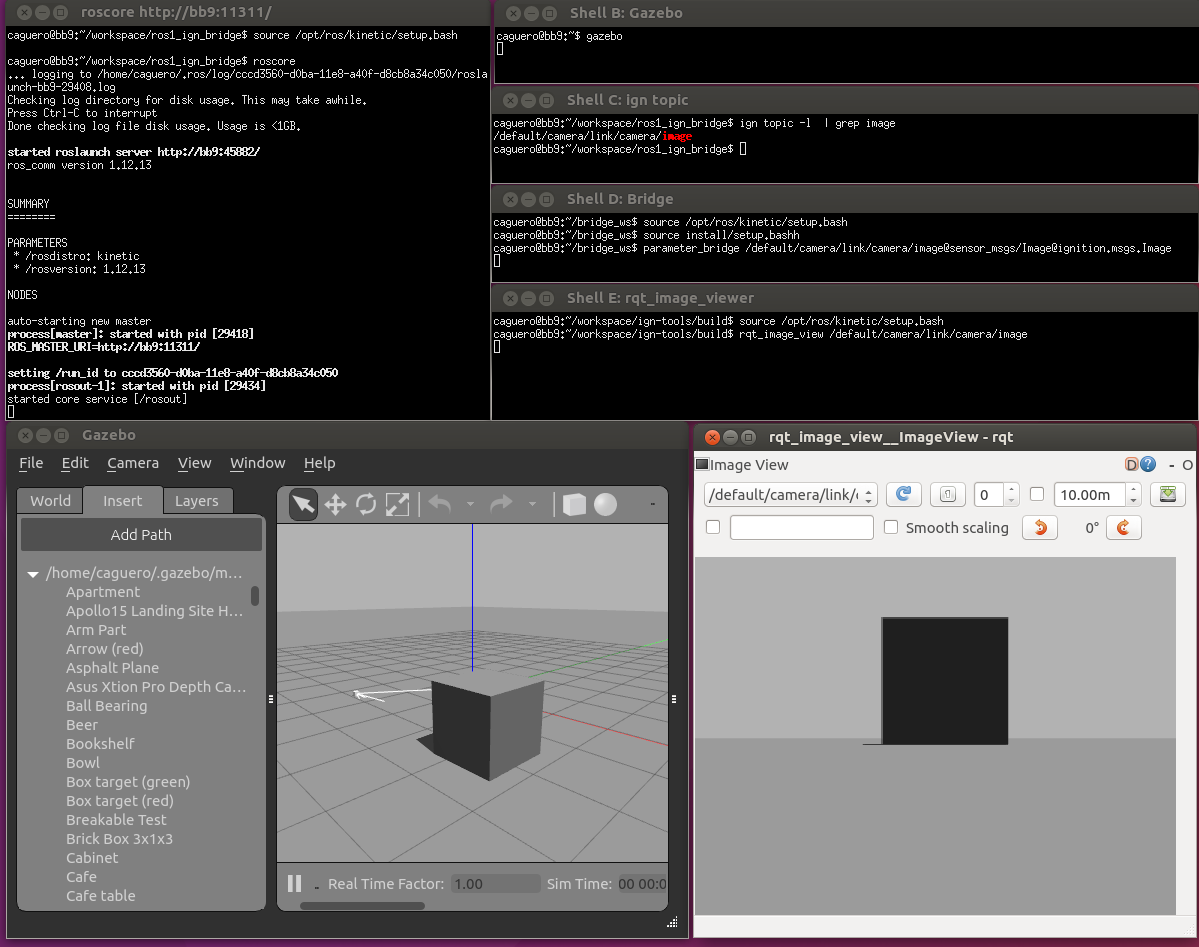
Example 2: Run the bridge and exchange images
In this example, we’re going to generate Ignition Transport images using Gazebo
classic, that will be converted into ROS images, and visualized with rqt_viewer.
First we start a ROS roscore:
# Shell A:
. /opt/ros/noetic/setup.bash
roscore
Then we start Gazebo.
# Shell B:
gazebo
Once Gazebo is running, click on the Insert tab, and then, insert a Camera
object into the scene. Now, let’s see the topic where the camera images are
published.
# Shell C:
ign topic -l | grep image
/default/camera/link/camera/image
Then we start the parameter bridge with the previous topic.
# Shell D:
. ~/bridge_ws/install/setup.bash
rosrun ros_ign_bridge parameter_bridge /default/camera/link/camera/image@sensor_msgs/Image@ignition.msgs.Image
Now we start the ROS GUI:
# Shell E:
. /opt/ros/noetic/setup.bash
rqt_image_view /default/camera/link/camera/image
You should see the current images in rqt_image_view which are coming from
Gazebo (published as Ignition Msgs over Ignition Transport).
The screenshot shows all the shell windows and their expected content (it was taken using ROS Kinetic):
Changelog for package ros_ign_bridge
0.111.2 (2021-12-30)
- [noetic] 🏁 Dome EOL (#197)
- Don't double-build convert.cpp (#184)
- 🥳 [Noetic] Tweaks to bridge tutorial (#180)
- Contributors: Louise Poubel, Michael Carroll
0.111.1 (2021-07-20)
- Check imu orientation field (#168)
- [noetic] Update version docs, add Fortress (#166)
- Fix catkin_testing warning (#163)
- Add support for nav_msgs/OccupancyGrid (#137)
- [noetic] Edifice support (#139)
- Bridge int32 messages (#138)
- Add visualization_msgs/Marker
(#136)
- Add support for std_msgs/ColorRGBA
- Add support for visualization_msgs/Marker
- Add support for Pose_V to PoseArray (#134)
- Prevent segfault caused by missing values in sensor_msgs::JointState (#135)
- Add dome + melodic to CI (#126)
- [noetic] Update releases (#106)
- Contributors: Alejandro Hernández Cordero, Ian Chen, Jose Luis Rivero, Louise Poubel, Martin Pecka, Michael Carroll, Nate Koenig, Tobias Fischer
0.111.0 (2020-07-23)
- Noetic support (#93) Co-authored-by: Jose Luis Rivero <<jrivero@osrfoundation.org>>
- Install only what's necessary, rename builtin_interfaces (#96)
- Move headers to src, rename builtin_interfaces (#96)
- Choose collection based on environment variable
(#72)
- Choose collection based on the environment variable IGNITION_VERSION
- Contributors: Louise Poubel
0.9.2 (2020-05-14)
0.9.1 (2020-05-13)
0.9.0 (2020-05-13)
- Add ignition::msgs::Pose_V to tf2_msgs::TFMessage conversion
(#67)
- add ign pose_v to ros tf2_message bridge
- add tf2 msgs dependency
- Add Float64 to ignition Double conversions. This is needed for
suppo…
(#64)
- Add Float64 to ignition Double conversions. This is needed for supporting joint controller (such as for a pan/tilt gimbal)
- Update README to reflect that bridge now supports double message conversions.
- Update Melodic docs (#61)
- Patches for Citadel release
(#56)
- Patches for Citadel release
- Mention Citadel or Blueprint deps
- Merge pull request #55 from osrf/fix_repo_url Update repo URL in README install isntructions
- Update repo URL in README install isntructions
- [Citadel] Citadel support
(#48)
- Citadel support
- more citadel deps
- addressing feedback, fix typos and better find logic
- fix CI
- Contributors: Jose Luis Rivero, chapulina, iche033, realdealneil
0.8.0 (2019-11-22)
- Add support for std_msgs/Empty (#52)
- Add support for std_msgs/Bool (#49) Signed-off-by: Michael Carroll <<michael@openrobotics.org>>
- Add replaces for each package (#46)
- Make all API and comments ROS-version agnostic Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Rename packages and fix compilation + tests Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Move files ros1 -> ros Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Addisu Taddese, Louise Poubel, Michael Carroll, chapulina
0.7.0 (2019-08-15)
- Merge pull request #38 from osrf/unidirectional Support unidirectional bridge topics
- More examples
- Merge pull request #37 from osrf/debug Adding debug and error statements
- Switch to characters supported by ros
- Merge branch 'debug' into unidirectional
- More output, and rosconsole depend
- Support specification of bridge direction
- Adding debug and error statements
- Contributors: Nate Koenig
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
- Update README.md
- Contributors: Carlos Agüero
0.6.0 (2019-08-02)
- Merge pull request #33 from osrf/issue_31 Fix issue #31
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Use intra-process field from messageInfo.
- Contributors: Carlos Aguero, Nate Koenig, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
- tests and reverse bridge for pointcloud
- Bridge point cloud packed
- Contributors: Nate Koenig
0.3.1 (2019-07-01)
0.3.0 (2019-06-28)
- 0.2.0
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Point clouds for RGBD cameras
(#17)
- Beginning of point cloud package
- Populating image data, but result is not correct. Must find out where's the source of the problem.
- RGB -> BGR: why?
- Cleanup code and example
- pointcloud -> point_cloud
- add keys - how was this working before?
- install wget
- well, we need ign-gz2 :sweat_smile:
- README update
- PR feedback
- .travis/build: rosdep skip ignition keys (#18)
- .travis/build: rosdep skip ignition keys
- Update build
- Move package to subfolder, add metapackage (#16)
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| rostest | |
| geometry_msgs | |
| nav_msgs | |
| rosgraph_msgs | |
| rosconsole | |
| roscpp | |
| sensor_msgs | |
| std_msgs | |
| std_srvs | |
| tf2_msgs | |
| visualization_msgs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| ros_ign | |
| ros_ign_gazebo_demos | |
| ros_ign_image |
Messages
Services
Plugins
Recent questions tagged ros_ign_bridge at Robotics Stack Exchange
|
|
ros_ign_bridge package from ros_ign reporos_ign ros_ign_bridge ros_ign_gazebo ros_ign_gazebo_demos ros_ign_image ros_ign_interfaces ros_ign_point_cloud |
Package Summary
| Tags | No category tags. |
| Version | 0.233.4 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Integration between ROS (1 and 2) and Gazebo simulation |
| Checkout URI | https://github.com/ignitionrobotics/ros_ign.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-09-23 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | cpp robotics simulation pubsub ros transport gazebo ignition-transport hacktoberfest ros2 ignition robotics-simulation gazebosim ignition-gazebo |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Louise Poubel
Authors
- Shivesh Khaitan
Bridge communication between ROS and Ignition Transport
This package provides a network bridge which enables the exchange of messages between ROS and Ignition Transport.
The bridge is currently implemented in C++. At this point there’s no support for service calls. Its support is limited to only the following message types:
| ROS type | Ignition Transport type |
|---|---|
| std_msgs/msg/Bool | ignition::msgs::Boolean |
| std_msgs/msg/ColorRGBA | ignition::msgs::Color |
| std_msgs/msg/Empty | ignition::msgs::Empty |
| std_msgs/msg/Float32 | ignition::msgs::Float |
| std_msgs/msg/Float64 | ignition::msgs::Double |
| std_msgs/msg/Header | ignition::msgs::Header |
| std_msgs/msg/Int32 | ignition::msgs::Int32 |
| std_msgs/msg/UInt32 | ignition::msgs::UInt32 |
| std_msgs/msg/String | ignition::msgs::StringMsg |
| geometry_msgs/msg/Wrench | ignition::msgs::Wrench |
| geometry_msgs/msg/Quaternion | ignition::msgs::Quaternion |
| geometry_msgs/msg/Vector3 | ignition::msgs::Vector3d |
| geometry_msgs/msg/Point | ignition::msgs::Vector3d |
| geometry_msgs/msg/Pose | ignition::msgs::Pose |
| geometry_msgs/msg/PoseStamped | ignition::msgs::Pose |
| geometry_msgs/msg/Transform | ignition::msgs::Pose |
| geometry_msgs/msg/TransformStamped | ignition::msgs::Pose |
| geometry_msgs/msg/Twist | ignition::msgs::Twist |
| mav_msgs/msg/Actuators (TODO) | ignition::msgs::Actuators (TODO) |
| nav_msgs/msg/Odometry | ignition::msgs::Odometry |
| rcl_interfaces/msg/ParameterValue | ignition::msgs::Any |
| ros_ign_interfaces/msg/Contact | ignition::msgs::Contact |
| ros_ign_interfaces/msg/Contacts | ignition::msgs::Contacts |
| ros_ign_interfaces/msg/Dataframe | ignition::msgs::Dataframe |
| ros_ign_interfaces/msg/Entity | ignition::msgs::Entity |
| ros_ign_interfaces/msg/GuiCamera | ignition::msgs::GUICamera |
| ros_ign_interfaces/msg/JointWrench | ignition::msgs::JointWrench |
| ros_ign_interfaces/msg/Light | ignition::msgs::Light |
| ros_ign_interfaces/msg/ParamVec | ignition::msgs::Param |
| ros_ign_interfaces/msg/ParamVec | ignition::msgs::Param_V |
| ros_ign_interfaces/msg/StringVec | ignition::msgs::StringMsg_V |
| ros_ign_interfaces/msg/TrackVisual | ignition::msgs::TrackVisual |
| ros_ign_interfaces/msg/VideoRecord | ignition::msgs::VideoRecord |
| rosgraph_msgs/msg/Clock | ignition::msgs::Clock |
| sensor_msgs/msg/BatteryState | ignition::msgs::BatteryState |
| sensor_msgs/msg/CameraInfo | ignition::msgs::CameraInfo |
| sensor_msgs/msg/FluidPressure | ignition::msgs::FluidPressure |
| sensor_msgs/msg/Imu | ignition::msgs::IMU |
| sensor_msgs/msg/Image | ignition::msgs::Image |
| sensor_msgs/msg/JointState | ignition::msgs::Model |
| sensor_msgs/msg/LaserScan | ignition::msgs::LaserScan |
| sensor_msgs/msg/MagneticField | ignition::msgs::Magnetometer |
| sensor_msgs/msg/NavSatFix | ignition::msgs::NavSat |
| sensor_msgs/msg/PointCloud2 | ignition::msgs::PointCloudPacked |
| tf2_msgs/msg/TFMessage | ignition::msgs::Pose_V |
| trajectory_msgs/msg/JointTrajectory | ignition::msgs::JointTrajectory |
Run ros2 run ros_ign_bridge parameter_bridge -h for instructions.
Example 1a: Ignition Transport talker and ROS 2 listener
Start the parameter bridge which will watch the specified topics.
# Shell A:
. ~/bridge_ws/install/setup.bash
ros2 run ros_ign_bridge parameter_bridge /chatter@std_msgs/msg/String@ignition.msgs.StringMsg
Now we start the ROS listener.
# Shell B:
. /opt/ros/galactic/setup.bash
ros2 topic echo /chatter
Now we start the Ignition Transport talker.
# Shell C:
ign topic pub -t /chatter -m ignition.msgs.StringMsg -p 'data:"Hello"'
Example 1b: ROS 2 talker and Ignition Transport listener
Start the parameter bridge which will watch the specified topics.
# Shell A:
. ~/bridge_ws/install/setup.bash
ros2 run ros_ign_bridge parameter_bridge /chatter@std_msgs/msg/String@ignition.msgs.StringMsg
Now we start the Ignition Transport listener.
# Shell B:
ign topic -e -t /chatter
Now we start the ROS talker.
# Shell C:
. /opt/ros/galactic/setup.bash
ros2 topic pub /chatter std_msgs/msg/String "data: 'Hi'" --once
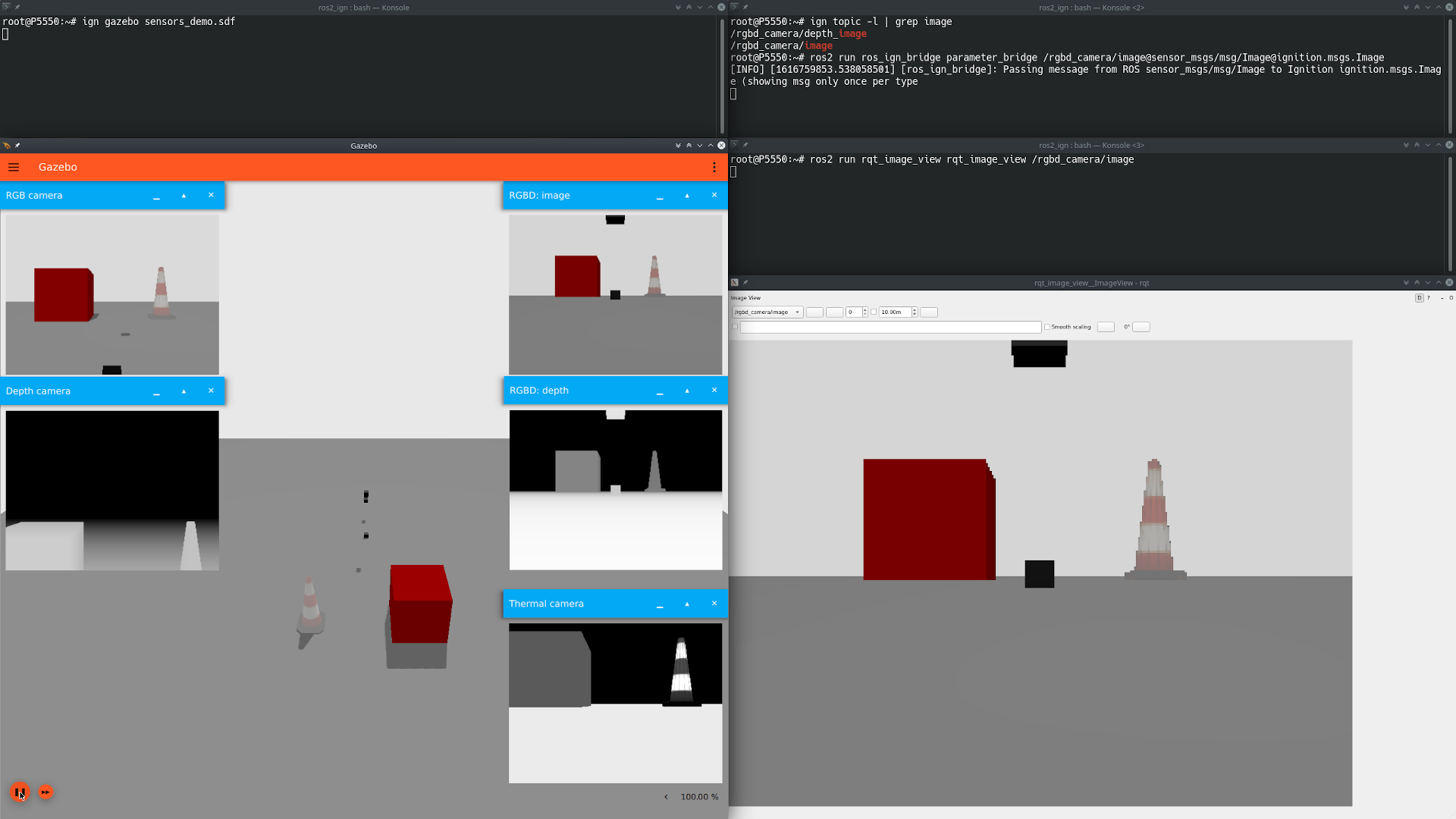
Example 2: Run the bridge and exchange images
In this example, we’re going to generate Ignition Transport images using
Ignition Gazebo, that will be converted into ROS images, and visualized with
rqt_image_viewer.
First we start Ignition Gazebo.
# Shell A:
ign gazebo sensors_demo.sdf
Let’s see the topic where camera images are published.
# Shell B:
ign topic -l | grep image
/rgbd_camera/depth_image
/rgbd_camera/image
Then we start the parameter bridge with the previous topic.
# Shell B:
. ~/bridge_ws/install/setup.bash
ros2 run ros_ign_bridge parameter_bridge /rgbd_camera/image@sensor_msgs/msg/Image@ignition.msgs.Image
Now we start the ROS GUI:
# Shell C:
. /opt/ros/galactic/setup.bash
ros2 run rqt_image_view rqt_image_view /rgbd_camera/image
You should see the current images in rqt_image_view which are coming from
Gazebo (published as Ignition Msgs over Ignition Transport).
The screenshot shows all the shell windows and their expected content (it was taken using ROS 2 Galactic and Ignition Fortress):
Example 3: Static bridge
In this example, we’re going to run an executable that starts a bidirectional
bridge for a specific topic and message type. We’ll use the static_bridge
executable that is installed with the bridge.
The example’s code can be found under ros_ign_bridge/src/static_bridge.cpp.
In the code, it’s possible to see how the bridge is hardcoded to bridge string
messages published on the /chatter topic.
Let’s give it a try, starting with Ignition -> ROS 2.
On terminal A, start the bridge:
ros2 run ros_ign_bridge static_bridge
On terminal B, we start a ROS 2 listener:
ros2 topic echo /chatter std_msgs/msg/String
And terminal C, publish an Ignition message:
ign topic pub -t /chatter -m ignition.msgs.StringMsg -p 'data:"Hello"'
At this point, you should see the ROS 2 listener echoing the message.
Now let’s try the other way around, ROS 2 -> Ignition.
On terminal D, start an Igntion listener:
ign topic -e -t /chatter
And on terminal E, publish a ROS 2 message:
ros2 topic pub /chatter std_msgs/msg/String 'data: "Hello"' -1
You should see the Ignition listener echoing the message.
Example 4: Configuring the Bridge via YAML
When configuring many topics, it is easier to use a file-based configuration in a markup
language. In this case, the ros_ign bridge supports using a YAML file to configure the
various parameters.
The configuration file must be a YAML array of maps. An example configuration for 5 bridges is below, showing the various ways that a bridge may be specified:
# Set just topic name, applies to both
- topic_name: "chatter"
ros_type_name: "std_msgs/msg/String"
ign_type_name: "ignition.msgs.StringMsg"
# Set just ROS topic name, applies to both
- ros_topic_name: "chatter_ros"
ros_type_name: "std_msgs/msg/String"
ign_type_name: "ignition.msgs.StringMsg"
# Set just IGN topic name, applies to both
- ign_topic_name: "chatter_ign"
ros_type_name: "std_msgs/msg/String"
ign_type_name: "ignition.msgs.StringMsg"
# Set each topic name explicitly
- ros_topic_name: "chatter_both_ros"
ign_topic_name: "chatter_both_ign"
ros_type_name: "std_msgs/msg/String"
ign_type_name: "ignition.msgs.StringMsg"
# Full set of configurations
- ros_topic_name: "ros_chatter"
ign_topic_name: "ign_chatter"
ros_type_name: "std_msgs/msg/String"
ign_type_name: "ignition.msgs.StringMsg"
subscriber_queue: 5 # Default 10
publisher_queue: 6 # Default 10
lazy: true # Default "false"
direction: BIDIRECTIONAL # Default "BIDIRECTIONAL" - Bridge both directions
# "IGN_TO_ROS" - Bridge Ignition topic to ROS
# "ROS_TO_IGN" - Bridge ROS topic to Ignition
To run the bridge node with the above configuration:
ros2 run ros_ign_bridge bridge_node --ros-args -p config_file:=$WORKSPACE/ros_ign/ros_ign_bridge/test/config/full.yaml
API
ROS 2 Parameters:
-
subscription_heartbeat- Period at which the node checks for new subscribers for lazy bridges. -
config_file- YAML file to be loaded as the bridge configuration
Changelog for package ros_ign_bridge
0.233.4 (2022-02-07)
- [galactic] backport test memory usage improvements
(#215)
- Improve modularity of ign/ros publisher tests (#194)
- Break apart ros_subscriber test translation unit (#212)
- Fix deprecated parameter declaration Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Michael Carroll
0.233.3 (2021-12-30)
- Separate galactic branch from ros2 branch (#201)
- [ros2] 🏁 Dome EOL (#199)
- New Light Message, also bridge Color (#187) Co-authored-by: ahcorde <<ahcorde@gmail.com>>
- Statically link each translation unit (#193)
- Break apart convert and factories translation unit (#192) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Fixed ROS subscriber test in ros_ign_bridge (#189)
- Enable QoS overrides (#181)
- Fixed ros ign bridge documentation (#178)
- Expose Contacts through ROS bridge (#175)
- Contributors: Alejandro Hernández Cordero, Louise Poubel, Michael Carroll, Vatan Aksoy Tezer, William Lew
0.233.2 (2021-07-20)
- [ros2] Update version docs, add Galactic and Fortress (#164)
- Contributors: Louise Poubel
0.233.1 (2021-04-16)
- Default to Edifice for Rolling (#150)
- Ignore local publications for ROS 2 subscriber
(#146)
- Note: Does not work with all rmw implementations (e.g.: FastRTPS)
- Update documentation for installation instructions and bridge examples (#142)
- Edifice support (#140)
- Add JointTrajectory message conversion
(#121) Conversion
between
- ignition::msgs::JointTrajectory
- trajectory_msgs::msg::JointTrajectory
- Add TFMessage / Pose_V and Float64 / Double conversions (#117) Addresses issue #116
- Updated prereq & branch name (#113)
- Update releases (#108)
- Updated README.md (#104)
- Add support for Dome (#103)
- Contributors: Alejandro Hernández Cordero, Andrej Orsula, Florent Audonnet, Jenn, Louise Poubel, Luca Della Vedova
0.221.1 (2020-08-19)
- Add pkg-config as a buildtool dependency (#102)
- Port ros_ign_bridge tests to ROS 2 (#98)
- Rename test_utils.hpp (#98)
- Contributors: Louise Poubel, ahcorde
0.221.0 (2020-07-23)
- Install only what's necessary, rename builtin_interfaces (#95)
- Move headers to src, rename builtin_interfaces (#95)
- Integer support (#91) Adds Int32 to the bridge.
- [ros2] Fixed CI - Added Foxy (#89) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Ignore ros-args in parameter bridge (#65)
- Update Dashing docs (#62)
- Update dependencies to Citadel (#57)
- [WIP] Port ign_ros_gazebo_demos to ROS2 (#58) Port ros_ign_image to ROS2 Port ros_ign_gazebo_demos to ROS2
- Add support for std_msgs/Empty (#53)
- Add support for std_msgs/Bool (#50)
- [ros2] Port ros_ign_bridge to ROS2 (#45)
- Enable ROS2 CI for Dashing branch (#43)
- Make all API and comments ROS-version agnostic
- Rename packages and fix compilation + tests
- Move files ros1 -> ros
- Contributors: Addisu Taddese, Alejandro Hernández Cordero, Jose Luis Rivero, Louise Poubel, Luca Della Vedova, Michael Carroll, Mohamed Ahmed, Shivesh Khaitan, chapulina
0.7.0 (2019-08-15)
- Merge pull request #38 from osrf/unidirectional Support unidirectional bridge topics
- More examples
- Merge pull request #37 from osrf/debug Adding debug and error statements
- Switch to characters supported by ros
- Merge branch 'debug' into unidirectional
- More output, and rosconsole depend
- Support specification of bridge direction
- Adding debug and error statements
- Contributors: Nate Koenig
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
- Update README.md
- Contributors: Carlos Agüero
0.6.0 (2019-08-02)
- Merge pull request #33 from osrf/issue_31 Fix issue #31
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Use intra-process field from messageInfo.
- Contributors: Carlos Aguero, Nate Koenig, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
- tests and reverse bridge for pointcloud
- Bridge point cloud packed
- Contributors: Nate Koenig
0.3.1 (2019-07-01)
0.3.0 (2019-06-28)
- 0.2.0
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Point clouds for RGBD cameras
(#17)
- Beginning of point cloud package
- Populating image data, but result is not correct. Must find out where's the source of the problem.
- RGB -> BGR: why?
- Cleanup code and example
- pointcloud -> point_cloud
- add keys - how was this working before?
- install wget
- well, we need ign-gz2 :sweat_smile:
- README update
- PR feedback
- .travis/build: rosdep skip ignition keys (#18)
- .travis/build: rosdep skip ignition keys
- Update build
- Move package to subfolder, add metapackage (#16)
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged ros_ign_bridge at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 0.254.2 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Integration between ROS (1 and 2) and Gazebo simulation |
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-07-03 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | cpp robotics simulation pubsub ros transport gazebo ignition-transport hacktoberfest ros2 ignition robotics-simulation gazebosim ignition-gazebo |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Brandon Ong
Authors
This is a shim package
For ros_gz_bridge
Changelog for package ros_ign_bridge
0.254.2 (2024-07-03)
- 0.244.14
- Changelog
- 0.244.13
- Changelog
- 0.244.12
- Changelog
- Contributors: Addisu Z. Taddese, Alejandro Hernández Cordero
0.254.1 (2024-04-08)
0.254.0 (2024-01-08)
0.247.0 (2023-11-02)
0.245.0 (2023-05-23)
0.244.11 (2023-05-23)
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge branch 'ros2' into ports/galactic_to_ros2
- Merge branch 'galactic' into ports/galactic_to_ros2
- Make tests faster and more robust (#272)
- Improve documentation around yaml configuration (#271)
- Fix small typo in bridge README (#270)
- Port NavSat (#224) from ROS 1 to ROS 2 (#268) Co-authored-by: Tyler Howell <<76003804+TyHowellWork@users.noreply.github.com>>
- Add ParamVec and bridge from Ignition
(#261)
- Introduces [ros_ign_interfaces::msg::ParamVec]{.title-ref} for storing a list of Parameters that are int, bool, double, or string.
- Introduces bridge for [ignition::msgs::param]{.title-ref} to [ros_ign_interfaces::msg::ParamVec]{.title-ref}
- Introduces bridge for [ignition::msgs::param_v]{.title-ref} to [ros_ign_interfaces::msg::ParamVec]{.title-ref}
- Add support for converting Any <-> ParamValue
(#260)
- Add support for converting Any <-> ParamValue
- Feature: set QoS options to override durability (#250) (#259) Co-authored-by: Louise Poubel <<louise@openrobotics.org>> Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>>
- Add node component and yaml-configured bridge node
(#238)
- Refactor in support of adding yaml-configured node
- Add rssi to Dataframe.msg
(#249)
- Adding rssi field to ros_ign_interfaces/Dataframe.msg
- Use the python generator for tests as well
(#234)
- Use the python generator for tests as well
- Generate boilerplate files from Python scripts (#233) The way that we add factories can be a bit error-prone, as there are a lot of strings that cannot be checked at compilation time. This changes several of the boilerplate files to be generated automatically by python scripts, in line with how ros1_bridge does it.
- [galactic] Backport GuiCamera, StringVec, TrackVisual, VideoRecord
(#241)
- [ros_ign_interfaces] Add more interface definitions.
- Add converion functions for the added messages
- Update the factory factory function with the new messages
- Add new messages to docs
* Add test cases for the new messages conversions Co-authored-by: Ivan Santiago Paunovic <<ivanpauno@ekumenlabs.com>>
- Add Dataframe message and bridging (#239)
- Factory interface needs virtual destructor (#232)
- Optional "lazy" bridge subscribers
(#225) This
allows for the bridge to be created in such a way that it is
"lazy". In this case "lazy" means:
- The publication (output) side of the bridge is always on and actively looking for subscriptions.
- The subscription (input) side of the bridge is only turned on in the case that there are subscriptions on the output side.
- Contributors: Carlos Agüero, Louise Poubel, Michael Carroll
0.244.6 (2022-09-14)
- Restructured directories (#296)
- Contributors: Alejandro Hernández Cordero
0.244.5 (2022-09-12)
- ign -> gz : ros_gz Migration (Shims) (#281) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: methylDragon
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_index_cpp | |
| ros_gz_bridge |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dolly_ignition | |
| dolly_tests | |
| ros_ign | |
| simulation |