No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | 🍀 Develop a SLAM algorithm based on ORB_SLAM2 along with TX2、ZED2、ROS and a mobile platform |
| Checkout URI | https://github.com/shieldqiqi/tx2_stereoslam.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2021-11-25 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | ros orb-slam2 visual-slam jetson-tx2 zed2 |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
"zed_rtabmap_example" is a ROS package to show how to use the ROS wrapper with
Additional Links
Maintainers
- STEREOLABS
Authors
No additional authors.
Stereolabs ZED Camera - RTAB-map example
This package shows how to use the ZED Wrapper with RTAB-map
Installation
Follow the install guide
Run the program
To launch the example, open a terminal and launch:
$ roslaunch zed_rtabmap_example zed_rtabmap.launch
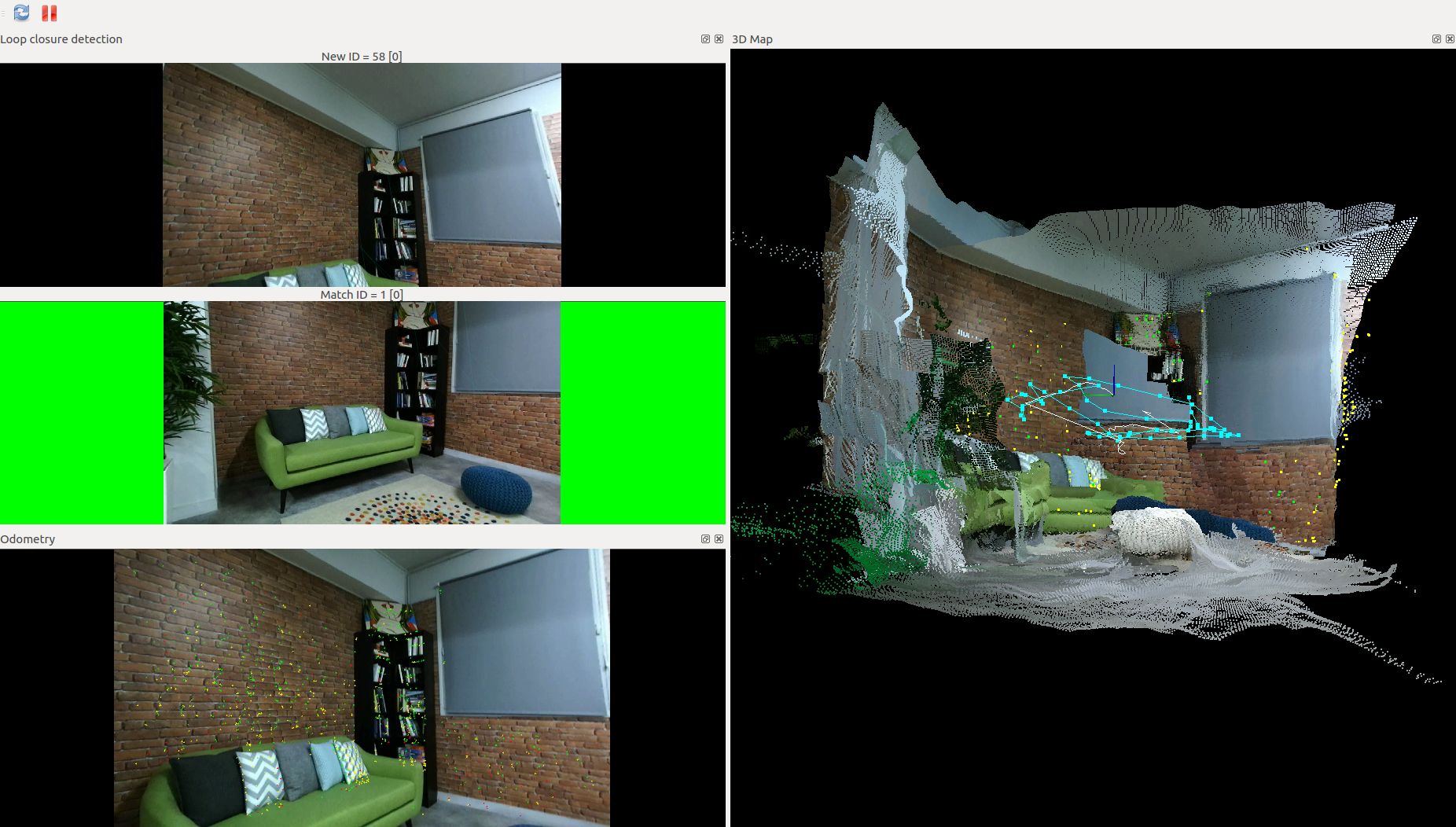
Example of indoor 3D mapping using RTAB-map and ZED
The launch file explained
To correctly use the ZED wrapper with the rtabmap_ros node we need to match the following RTABmap parameters:
-
rgb_topic-> topic of the color information to be associated to the points of the 3D map -
depth_topic-> topic of the depth information -
camera_info_topic-> topic of RGB camera parameters used to create the association of each color pixel to the relative 3D point -
depth_camera_info_topic-> topic of the depth camera parameter, to convert the 2D depth image to a 3D point cloud -
odom_topic-> name of the camera frame
The values associated to the above parameters are the following:
<arg name="odom_topic" default="zed_node/odom" />
<arg name="rgb_topic" default="zed_node/rgb/image_rect_color" />
<arg name="depth_topic" default="zed_node/depth/depth_registered" />
<arg name="camera_info_topic" default="zed_node/rgb/camera_info" />
<arg name="depth_camera_info_topic" default="zed_node/depth/camera_info" />
Note: the example as been tested using the packages rtabmap v0.19.3 and rtabmap_ros v0.19.3 available with the binary version of ROS Melodic.
To check the version of RTABmap currently installed on your system you can use the commands:
$ rosversion rtabmap
and
$ rosversion rtabmap_ros
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rtabmap | |
| rtabmap_ros | |
| zed_wrapper | |
| rviz |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| zed_examples |
Launch files
- launch/zed_rtabmap.launch
- Copyright (c) 2018, STEREOLABS. All rights reserved. THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
- zed_namespace [default: zed]
- svo_file [default: ]
- zed_node_name [default: zed_node]
- camera_model [default: zed2]
- publish_urdf [default: true]
- custom_rtabmap_launch_file [default: $(find zed_rtabmap_example)/launch/include/sl_rtabmap.launch.xml]
- odom_topic [default: zed_node/odom]
- rgb_topic [default: zed_node/rgb/image_rect_color]
- depth_topic [default: zed_node/depth/depth_registered]
- camera_info_topic [default: zed_node/rgb/camera_info]
- depth_camera_info_topic [default: zed_node/depth/camera_info]
- launch/include/sl_rtabmap.launch.xml
- RTAB-Map launcher
-
- localization [default: false]
- args [default: ]
- args [default: --delete_db_on_start]
- rgb_topic [default: zed/zed_node/rgb/image_rect_color]
- depth_topic [default: zed/zed_node/depth/depth_registered]
- camera_info_topic [default: zed/zed_node/rgb/camera_info]
- depth_camera_info_topic [default: zed/zed_node/depth/camera_info]
- odom_topic [default: zed/zed_node/odom]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged zed_rtabmap_example at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.