
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
|
|
Repository Summary
| Description | |
| Checkout URI | https://github.com/tup-robomaster/tup2023-sentry-nav.git |
| VCS Type | git |
| VCS Version | lio_WIP |
| Last Updated | 2023-09-22 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
README
TUP2023-Sentry-Nav
沈阳航空航天大学TUP战队2023年哨兵导航模块
作者: 顾昊
1. 简介
该模块为哨兵导航模块,负责进行3维点云至2.5D转换,激光里程计(LIO),重定位,路径规划,让哨兵在比赛场地内可以进行自身的定位与路径规划. 该分支为LIO分支.
2.项目结构
├── dll 重定位模块
├── FAST_LIO FAST-LIO激光里程计
├── grid_map grid_map库,用于生成2.5D高程地图
├── imu_tools IMU滤波库,用于提供位姿
├── LICENSE 协议
├── LIO-SAM LIO-SAM激光里程计
├── livox_ros_driver2 livox驱动
├── navigation2 nav2库,用于导航
├── octomap_mapping PCD转八叉树地图
├── pic 图像
└── README.md 文档
3.软件设计
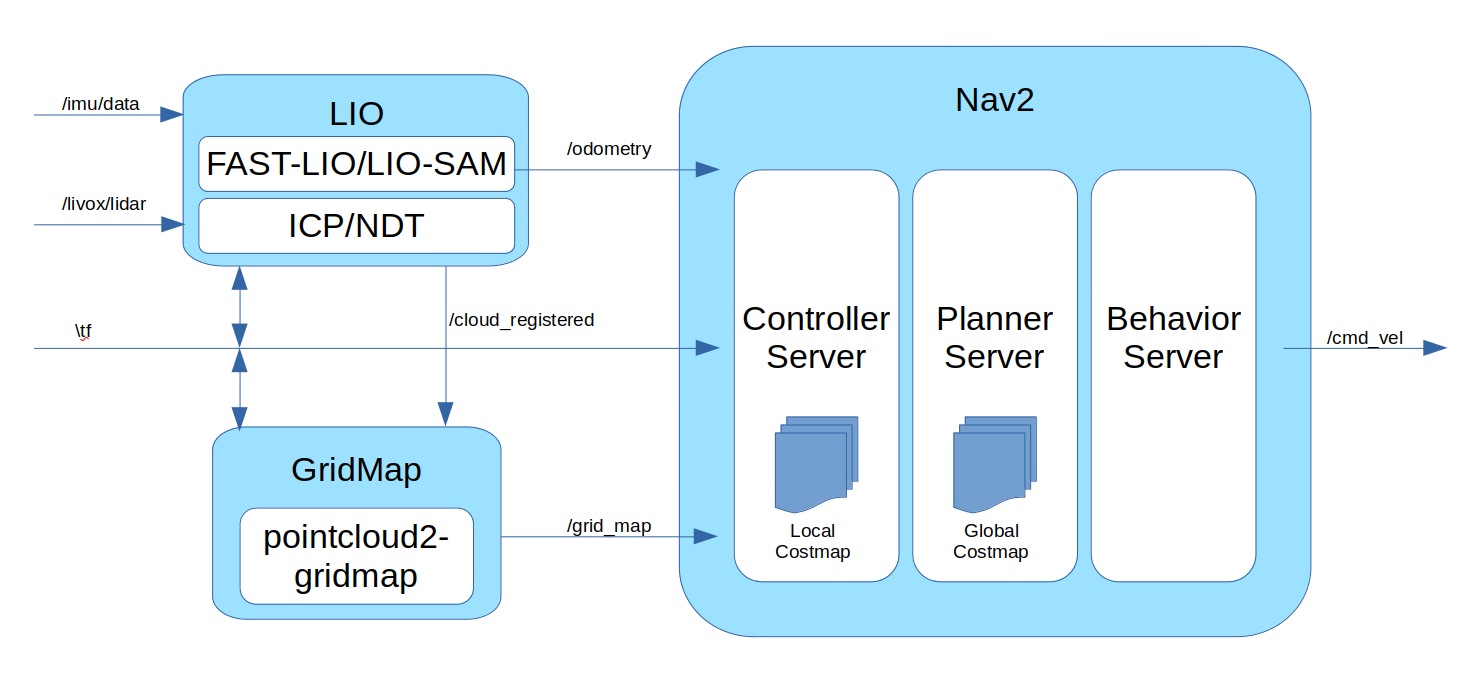
导航部分软件大致可分为四块:
-
Drivers: livox_ros_driver2, imu_tools,基本的设备驱动节点,图上未画出 -
LIO: FAST-LIO,LIO-SAM,dll,负责进行LIO和重定位以确定机器人位置 -
GridMap: grid_map,负责将点云转换为2.5D高程地图,供nav2导航使用 -
Nav2: nav2,本仓库的核心,负责进行最终的导航
3.1 激光里程计
激光里程计部分我们提供了FAST-LIO和LIO-SAM的实现,使用者可以自行选择,我们经过测试总结了两种算法的特点一些特点,总结在下面对比供对比参考: ||FAST-LIO|LIO-SAM| |—|—|—| |IMU|对陀螺仪数据质量要求相对较低|预积分基于gtsam库实现,对陀螺仪数据质量要求高,可能会出现IMU积分数值不稳定程序崩溃的危险| |回环检测|无|有,但退化场景下不推荐使用,存在飘飞可能| |算力需求|相对较低|相对较高|
总的来说,如果需要使用LIO-SAM,务必确保陀螺仪数据质量得到保证.
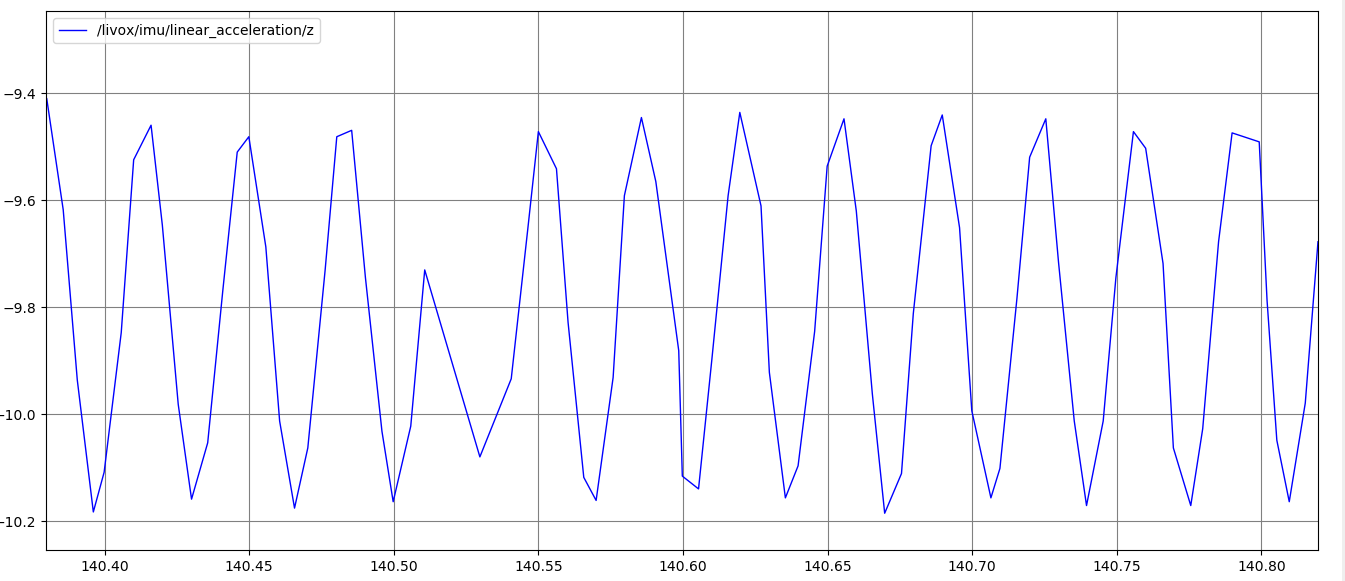
Mid360开机后振动大,对陀螺仪数据有较大影响(约为25hz正弦波,幅值±0.3m/s^2,可能是内部机械结构旋转所致).可适当进行数据处理或者使用外接陀螺仪以提高定位精度.
CONTRIBUTING
No CONTRIBUTING.md found.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.