
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 navigaiton tutorials and do quadruped robot |
| Checkout URI | https://github.com/duyongquan/openrobotics.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-16 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- quan
Authors
1 tutorial 1(initial_env_test)
1.1 功能介绍
环境搭建,打印一句话
1.2 代码
头文件tutorials_topic_demo1_initial_env.hpp
#include <chrono>
#include <memory>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
namespace ros2_tutorials
{
namespace topic
{
class EmptyNode : public rclcpp::Node
{
public:
EmptyNode();
~EmptyNode();
};
} // namespace topic
} // namespace ros2_tutorials
tutorials_topic_demo1_initial_env.cpp
#include "topic/tutorials_topic_demo1_initial_env.hpp"
namespace ros2_tutorials
{
namespace topic
{
EmptyNode::EmptyNode()
: Node("empty")
{
RCLCPP_INFO(get_logger(), "Creating empty node.");
}
EmptyNode::~EmptyNode()
{
}
} // namespace topic
} // namespace ros2_tutorials
测试文件tutorials_topic_demo1_initial_env_test.cpp
#include "topic/tutorials_topic_demo1_initial_env.hpp"
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto empty_node = std::make_shared<ros2_tutorials::topic::EmptyNode>();
rclcpp::spin(empty_node);
rclcpp::shutdown();
return 0;
}
1.3 编译
colcon build --packages-up-to topic
1.4 运行
source环境变量
source install/setup.zsh
方式1
cd install/topic/lib/topic/
./tutorial.topic.initial_env_test
方式2
ros2 launch topic tutorials_topic_demo1_initial_env_test_launch.py
1.5 运行结果

2 tutorial 2(member_function_test)
2.1 功能介绍
创建一个消息发布者,每隔500ms发布一次消息“’Hello, world!”
2.2 代码
头文件tutorials_topic_demo2_member_function.hpp
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher();
~MinimalPublisher();
private:
void HandleTimerCallback();
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
源文件tutorials_topic_demo2_member_function.cpp
MinimalPublisher::MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::HandleTimerCallback, this));
}
MinimalPublisher::~MinimalPublisher()
{
}
void MinimalPublisher::HandleTimerCallback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
测试文件tutorials_topic_demo2_member_function_test.cpp
#include "topic/tutorials_topic_demo2_member_function.hpp"
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisher>();
rclcpp::spin(publisher_node);
rclcpp::shutdown();
return 0;
}
2.3 编译
colcon build --packages-up-to topic
2.4 运行
source环境变量
source install/setup.zsh
方式1
cd install/topic/lib/topic/
./tutorial.topic.tutorial.topic.member_function_test
方式2
ros2 launch topic tutorials_topic_demo2_member_function_test_launch.py
2.5 运行结果
3 tutorial 3(lambda_test)
3.1 功能介绍
创建一个消息发布者(处理函数是lambda表达式),每隔500ms发布一次消息“’Hello, world!”
3.2 代码
头文件tutorials_topic_demo3_lambda_test.hpp
class MinimalPublisherWithLambda : public rclcpp::Node
{
public:
MinimalPublisherWithLambda();
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
源文件tutorials_topic_demo3_lambda_test.cpp
MinimalPublisherWithLambda::MinimalPublisherWithLambda()
: Node("lambda_minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
auto timer_callback = [this]() -> void {
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(this->count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
this->publisher_->publish(message);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}
测试文件tutorials_topic_demo3_lambda_test.cpp
#include "topic/tutorials_topic_demo3_lambda.hpp"
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto empty_node = std::make_shared<ros2_tutorials::topic::MinimalPublisherWithLambda>();
rclcpp::spin(empty_node);
rclcpp::shutdown();
return 0;
}
3.3 编译
colcon build --packages-up-to topic
3.4 运行
source环境变量
source install/setup.zsh
方式1
cd install/topic/lib/topic/
./tutorial.topic.tutorial.topic.lambda_test
方式2
ros2 launch topic tutorials_topic_demo3_lambda_test_launch.py
3.5 运行结果
4 tutorial 4(lambda_test)
4.1 功能介绍
创建一个消息发布,每隔500ms发布一次消息“’Hello, world!”
4.2 代码
测试文件tutorials_topic_demo4_not_composable_test.cpp
#include <chrono>
#include <string>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* We do not recommend this style anymore, because composition of multiple
* nodes in the same executable is not possible. Please see one of the subclass
* examples for the "new" recommended styles. This example is only included
* for completeness because it is similar to "classic" standalone ROS nodes.
*/
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("not_composable_minimal_publisher");
auto publisher = node->create_publisher<std_msgs::msg::String>("topic", 10);
std_msgs::msg::String message;
auto publish_count = 0;
rclcpp::WallRate loop_rate(500ms);
while (rclcpp::ok()) {
message.data = "Hello, world! " + std::to_string(publish_count++);
RCLCPP_INFO(node->get_logger(), "Publishing: '%s'", message.data.c_str());
try {
publisher->publish(message);
rclcpp::spin_some(node);
} catch (const rclcpp::exceptions::RCLError & e) {
RCLCPP_ERROR(
node->get_logger(),
"unexpectedly failed with %s",
e.what());
}
loop_rate.sleep();
}
rclcpp::shutdown();
return 0;
}
4.3 编译
colcon build --packages-up-to topic
4.4 运行
source环境变量
source install/setup.zsh
方式1
cd install/topic/lib/topic/
./tutorial.topic.tutorial.topic.not_composable_test
方式2
ros2 launch topic tutorials.topic.demo4_not_composable_test.launch.py
4.5 运行结果
5 tutorial 5(订阅器member_function)
5.1 功能介绍
创建一个消息发布器和一个消息订阅器,每隔500ms发布一次消息“’Hello, world!”,而接受者订阅器每隔500ms会收到发布者的数据信息
5.2 代码
头文件tutorials_topic_demo2_member_function.hpp
- 在原来的头文件上修改,加上
MinimalSubscriber类
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher();
~MinimalPublisher();
private:
void HandleTimerCallback();
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber();
private:
void HandleTopicCallback(const std_msgs::msg::String::SharedPtr msg) const;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
源文件 tutorials_topic_demo2_member_function.cpp
MinimalSubscriber::MinimalSubscriber()
: Node("member_minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::HandleTopicCallback, this, std::placeholders::_1));
}
void MinimalSubscriber::HandleTopicCallback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
测试文件tutorials_topic_demo2_member_function_test.cpp
#include "topic/tutorials_topic_demo2_member_function.hpp"
// int main(int argc, char ** argv)
// {
// rclcpp::init(argc, argv);
// auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisher>();
// rclcpp::spin(publisher_node);
// rclcpp::shutdown();
// return 0;
// }
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// You MUST use the MultiThreadedExecutor to use, well, multiple threads
rclcpp::executors::MultiThreadedExecutor executor;
auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisher>();
auto subscriber_node = std::make_shared<ros2_tutorials::topic::MinimalSubscriber>(); // This contains BOTH subscriber callbacks.
// They will still run on different threads
// One Node. Two callbacks. Two Threads
executor.add_node(publisher_node);
executor.add_node(subscriber_node);
executor.spin();
rclcpp::shutdown();
return 0;
}
- 注释部分为demo2测试程序
- 因为是多个node执行在一个main函数中,需要MultiThreadedExecutor
5.3 编译
colcon build --packages-up-to topic
5.4 运行
source环境变量
source install/setup.zsh
方式1
cd install/topic/lib/topic/
./tutorial.topic.tutorial.topic.member_function_test
方式2
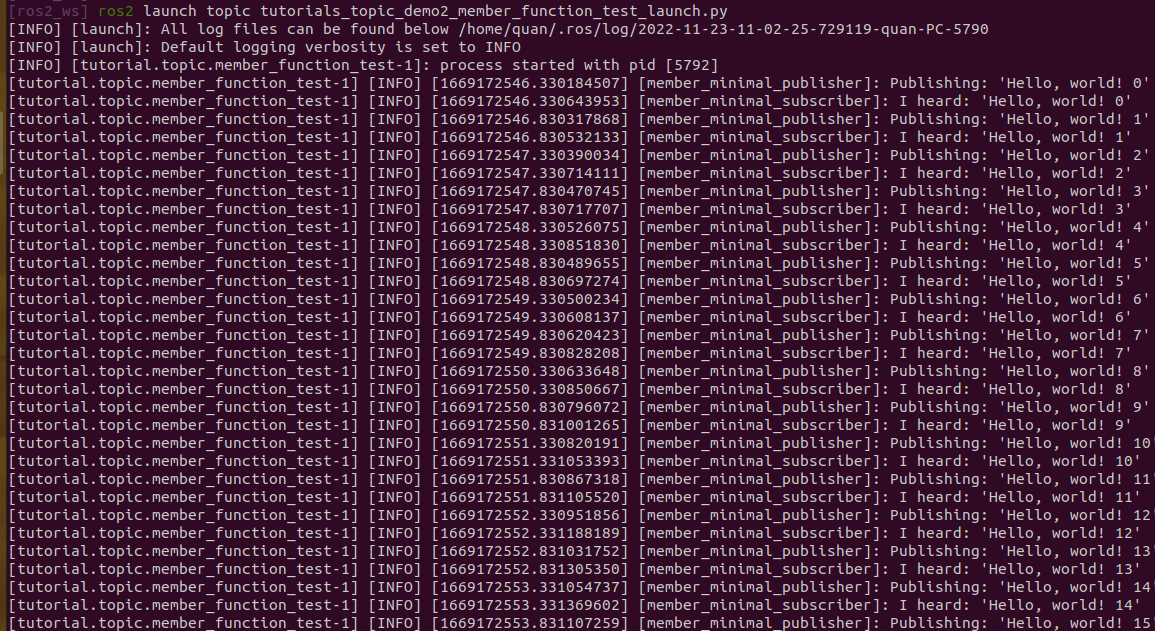
ros2 launch topic tutorials_topic_demo2_member_function_test_launch.py
- 以后推荐使用launch文件启动程序
5.5 运行结果
6 tutorial 6(订阅器-lambda_test)
6.1 功能介绍
创建一个消息发布者(处理函数是lambda表达式),每隔500ms发布一次消息“’Hello, world!”,而接受者订阅器每隔500ms会收到发布者的数据信息
6.2 代码
头文件tutorials_topic_demo3_lambda_test.hpp
class MinimalPublisherWithLambda : public rclcpp::Node
{
public:
MinimalPublisherWithLambda();
private:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
class MinimalSubscriberWithLambda : public rclcpp::Node
{
public:
MinimalSubscriberWithLambda();
private:
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
源文件tutorials_topic_demo3_lambda_test.cpp
MinimalPublisherWithLambda::MinimalPublisherWithLambda()
: Node("lambda_minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
auto timer_callback = [this]() -> void {
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(this->count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
this->publisher_->publish(message);
};
timer_ = this->create_wall_timer(500ms, timer_callback);
}
MinimalSubscriberWithLambda::MinimalSubscriberWithLambda()
: Node("labmbda_minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>("topic", 10,
[this](std_msgs::msg::String::UniquePtr msg) {
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
});
}
测试文件tutorials_topic_demo3_lambda_test.cpp
#include "topic/tutorials_topic_demo3_lambda.hpp"
// int main(int argc, char ** argv)
// {
// rclcpp::init(argc, argv);
// auto empty_node = std::make_shared<ros2_tutorials::topic::MinimalPublisherWithLambda>();
// rclcpp::spin(empty_node);
// rclcpp::shutdown();
// return 0;
// }
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// You MUST use the MultiThreadedExecutor to use, well, multiple threads
rclcpp::executors::MultiThreadedExecutor executor;
auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisherWithLambda>();
auto subscriber_node = std::make_shared<ros2_tutorials::topic::MinimalSubscriberWithLambda>(); // This contains BOTH subscriber callbacks.
// They will still run on different threads
// One Node. Two callbacks. Two Threads
executor.add_node(publisher_node);
executor.add_node(subscriber_node);
executor.spin();
rclcpp::shutdown();
return 0;
}
6.3 编译
colcon build --packages-up-to topic
6.4 运行
source环境变量
source install/setup.zsh
运行命令
ros2 launch topic tutorials_topic_demo3_lambda_test_launch.py
6.5 运行结果
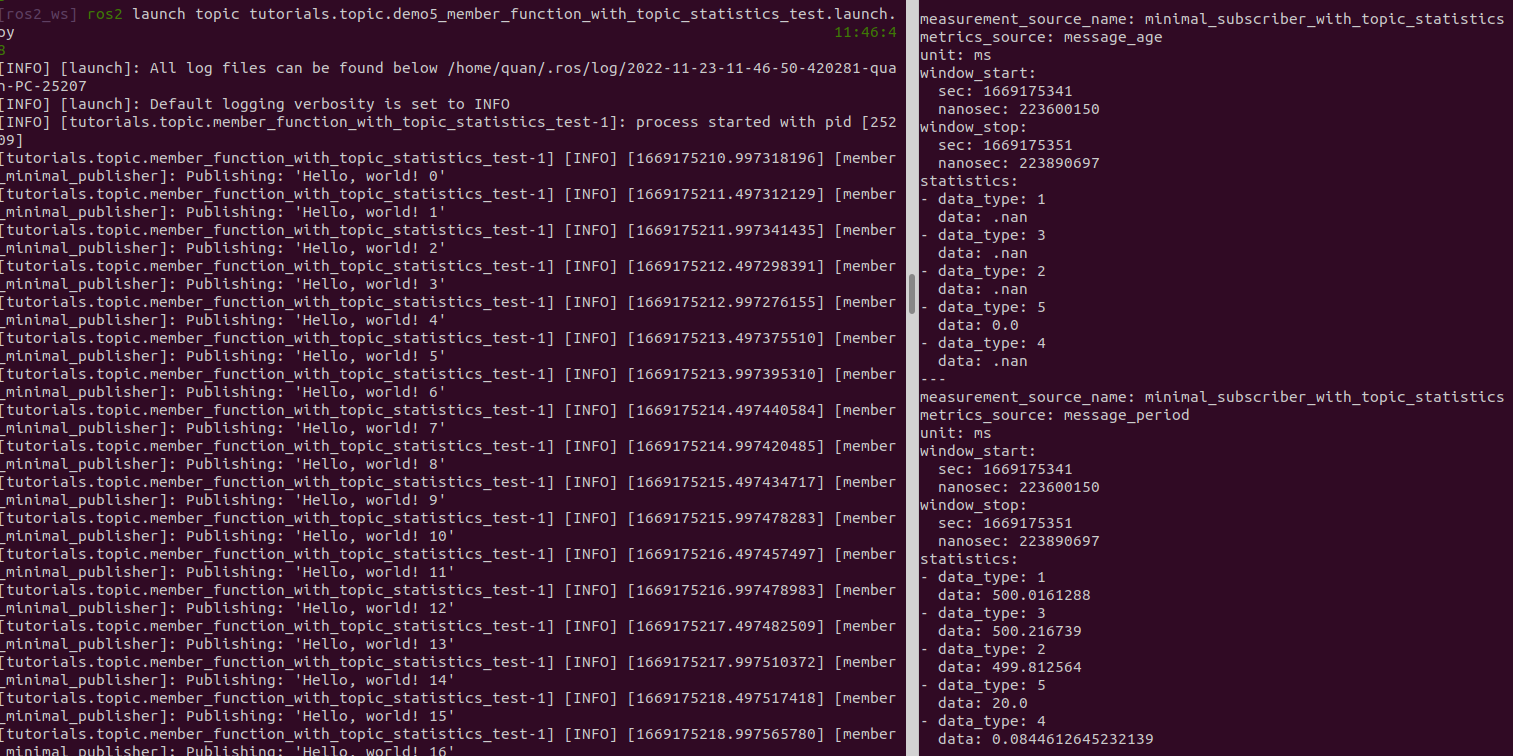
7 tutorial 7(订阅器-member_function_with_topic_statistics)
7.1 功能介绍
创建一个消息发布者(处理函数是lambda表达式),每隔500ms发布一次消息“’Hello, world!”,而接受者订阅器每隔500ms会收到发布者的数据信息
7.2 代码
头文件tutorials_topic_demo5_member_function_with_topic_statistics.hpp
class MinimalSubscriberWithTopicStatistics : public rclcpp::Node
{
public:
MinimalSubscriberWithTopicStatistics();
private:
void HandleTopicCallback(const std_msgs::msg::String::SharedPtr msg) const;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
源文件tutorials_topic_demo5_member_function_with_topic_statistics.cpp
MinimalSubscriberWithTopicStatistics::MinimalSubscriberWithTopicStatistics()
: Node("minimal_subscriber_with_topic_statistics")
{
// manually enable topic statistics via options
auto options = rclcpp::SubscriptionOptions();
options.topic_stats_options.state = rclcpp::TopicStatisticsState::Enable;
// configure the collection window and publish period (default 1s)
options.topic_stats_options.publish_period = std::chrono::seconds(10);
// configure the topic name (default '/statistics')
// options.topic_stats_options.publish_topic = "/topic_statistics"
auto callback = [this](std_msgs::msg::String::SharedPtr msg) {
this->HandleTopicCallback(msg);
};
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, callback, options);
}
void MinimalSubscriberWithTopicStatistics::HandleTopicCallback(
const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
测试文件tutorials_topic_demo5_member_function_with_topic_statistics_test.cpp
#include "topic/tutorials_topic_demo5_member_function_with_topic_statistics.hpp"
#include "topic/tutorials_topic_demo2_member_function.hpp"
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// You MUST use the MultiThreadedExecutor to use, well, multiple threads
rclcpp::executors::MultiThreadedExecutor executor;
auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisher>();
auto subscriber_node = std::make_shared<ros2_tutorials::topic::MinimalSubscriberWithTopicStatistics>(); // This contains BOTH subscriber callbacks.
// They will still run on different threads
// One Node. Two callbacks. Two Threads
executor.add_node(publisher_node);
executor.add_node(subscriber_node);
executor.spin();
rclcpp::shutdown();
return 0;
}
7.3 编译
colcon build --packages-up-to topic
7.4 运行
source环境变量
source install/setup.zsh
运行命令
ros2 launch topic tutorials.topic.demo5_member_function_with_topic_statistics_test.launch.py
7.5 运行结果
8 tutorial 8(订阅器-member_function_with_unique_network_flow_endpoints)
8.1 功能介绍
8.2 代码
头文件tutorials_topic_demo6_member_function_with_unique_network_flow_endpoints.hpp.
class MinimalPublisherWithUniqueNetworkFlowEndpoints : public rclcpp::Node
{
public:
MinimalPublisherWithUniqueNetworkFlowEndpoints();
private:
void timer_1_callback();
void timer_2_callback();
/// Print network flow endpoints in JSON-like format
void print_network_flow_endpoints(
const std::vector<rclcpp::NetworkFlowEndpoint> & network_flow_endpoints) const;
rclcpp::TimerBase::SharedPtr timer_1_;
rclcpp::TimerBase::SharedPtr timer_2_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_1_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_2_;
size_t count_1_;
size_t count_2_;
};
class MinimalSubscriberWithUniqueNetworkFlowEndpoints : public rclcpp::Node
{
public:
MinimalSubscriberWithUniqueNetworkFlowEndpoints();
private:
void topic_1_callback(const std_msgs::msg::String::SharedPtr msg) const;
void topic_2_callback(const std_msgs::msg::String::SharedPtr msg) const;
/// Print network flow endpoints in JSON-like format
void print_network_flow_endpoints(
const std::vector<rclcpp::NetworkFlowEndpoint> & network_flow_endpoints) const;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_1_;
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_2_;
};
源文件tutorials_topic_demo6_member_function_with_unique_network_flow_endpoints.cpp
MinimalPublisherWithUniqueNetworkFlowEndpoints::MinimalPublisherWithUniqueNetworkFlowEndpoints()
: Node("minimal_publisher_with_unique_network_flow_endpoints"), count_1_(0), count_2_(0)
{
// Create publisher with unique network flow endpoints
// Enable unique network flow endpoints via options
auto options_1 = rclcpp::PublisherOptions();
options_1.require_unique_network_flow_endpoints =
RMW_UNIQUE_NETWORK_FLOW_ENDPOINTS_OPTIONALLY_REQUIRED;
publisher_1_ = this->create_publisher<std_msgs::msg::String>("topic_1", 10, options_1);
timer_1_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisherWithUniqueNetworkFlowEndpoints::timer_1_callback, this));
// Create publisher without unique network flow endpoints
// Unique network flow endpoints are disabled in default options
auto options_2 = rclcpp::PublisherOptions();
publisher_2_ = this->create_publisher<std_msgs::msg::String>("topic_2", 10);
timer_2_ = this->create_wall_timer(
1000ms, std::bind(&MinimalPublisherWithUniqueNetworkFlowEndpoints::timer_2_callback, this));
// Get network flow endpoints
auto network_flow_endpoints_1 = publisher_1_->get_network_flow_endpoints();
auto network_flow_endpoints_2 = publisher_2_->get_network_flow_endpoints();
// Print network flow endpoints
print_network_flow_endpoints(network_flow_endpoints_1);
print_network_flow_endpoints(network_flow_endpoints_2);
}
void MinimalPublisherWithUniqueNetworkFlowEndpoints::timer_1_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_1_++);
RCLCPP_INFO(
this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_1_->publish(message);
}
void MinimalPublisherWithUniqueNetworkFlowEndpoints::timer_2_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hej, världen! " + std::to_string(count_2_++);
RCLCPP_INFO(
this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_2_->publish(message);
}
/// Print network flow endpoints in JSON-like format
void MinimalPublisherWithUniqueNetworkFlowEndpoints::print_network_flow_endpoints(
const std::vector<rclcpp::NetworkFlowEndpoint> & network_flow_endpoints) const
{
std::ostringstream stream;
stream << "{\"networkFlowEndpoints\": [";
bool comma_skip = true;
for (auto network_flow_endpoint : network_flow_endpoints) {
if (comma_skip) {
comma_skip = false;
} else {
stream << ",";
}
stream << network_flow_endpoint;
}
stream << "]}";
RCLCPP_INFO(
this->get_logger(), "%s",
stream.str().c_str());
}
MinimalSubscriberWithUniqueNetworkFlowEndpoints::MinimalSubscriberWithUniqueNetworkFlowEndpoints()
: Node("minimal_subscriber_with_unique_network_flow_endpoints")
{
try
{
// Create subscription with unique network flow endpoints
// Enable unique network flow endpoints via options
// Since option is strict, expect exception
auto options_1 = rclcpp::SubscriptionOptions();
options_1.require_unique_network_flow_endpoints =
RMW_UNIQUE_NETWORK_FLOW_ENDPOINTS_STRICTLY_REQUIRED;
subscription_1_ = this->create_subscription<std_msgs::msg::String>(
"topic_1", 10, std::bind(
&MinimalSubscriberWithUniqueNetworkFlowEndpoints::topic_1_callback, this,
_1), options_1);
// Create subscription without unique network flow endpoints
// Unique network flow endpoints are disabled by default
auto options_2 = rclcpp::SubscriptionOptions();
subscription_2_ = this->create_subscription<std_msgs::msg::String>(
"topic_2", 10, std::bind(
&MinimalSubscriberWithUniqueNetworkFlowEndpoints::topic_2_callback, this,
_1), options_2);
// Get network flow endpoints
auto network_flow_endpoints_1 = subscription_1_->get_network_flow_endpoints();
auto network_flow_endpoints_2 = subscription_2_->get_network_flow_endpoints();
// Check if network flow endpoints are unique
for (auto network_flow_endpoint_1 : network_flow_endpoints_1) {
for (auto network_flow_endpoint_2 : network_flow_endpoints_2) {
if (network_flow_endpoint_1 == network_flow_endpoint_2) {
RCLCPP_ERROR(
this->get_logger(), "Network flow endpoints across subscriptions are not unique");
break;
}
}
}
// Print network flow endpoints
print_network_flow_endpoints(network_flow_endpoints_1);
print_network_flow_endpoints(network_flow_endpoints_2);
} catch (const rclcpp::exceptions::RCLError & e) {
RCLCPP_ERROR(
this->get_logger(),
"Error: %s",
e.what());
}
}
void MinimalSubscriberWithUniqueNetworkFlowEndpoints::topic_1_callback(
const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "Topic 1 news: '%s'", msg->data.c_str());
}
void MinimalSubscriberWithUniqueNetworkFlowEndpoints::topic_2_callback(
const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "Topic 2 news: '%s'", msg->data.c_str());
}
/// Print network flow endpoints in JSON-like format
void MinimalSubscriberWithUniqueNetworkFlowEndpoints::print_network_flow_endpoints(
const std::vector<rclcpp::NetworkFlowEndpoint> & network_flow_endpoints) const
{
std::ostringstream stream;
stream << "{\"networkFlowEndpoints\": [";
bool comma_skip = true;
for (auto network_flow_endpoint : network_flow_endpoints) {
if (comma_skip) {
comma_skip = false;
} else {
stream << ",";
}
stream << network_flow_endpoint;
}
stream << "]}";
RCLCPP_INFO(
this->get_logger(), "%s",
stream.str().c_str());
}
测试文件tutorials_topic_demo6_member_function_with_unique_network_flow_endpoints.cpp
#include "topic/tutorials_topic_demo6_member_function_with_unique_network_flow_endpoints.hpp"
#include "topic/tutorials_topic_demo5_member_function_with_topic_statistics.hpp"
#include "topic/tutorials_topic_demo2_member_function.hpp"
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
// You MUST use the MultiThreadedExecutor to use, well, multiple threads
rclcpp::executors::MultiThreadedExecutor executor;
auto publisher_node = std::make_shared<ros2_tutorials::topic::MinimalPublisherWithUniqueNetworkFlowEndpoints>();
auto subscriber_node = std::make_shared<ros2_tutorials::topic::MinimalSubscriberWithUniqueNetworkFlowEndpoints>(); // This contains BOTH subscriber callbacks.
// They will still run on different threads
// One Node. Two callbacks. Two Threads
executor.add_node(publisher_node);
executor.add_node(subscriber_node);
executor.spin();
rclcpp::shutdown();
return 0;
}
8.3 编译
colcon build --packages-up-to topic
8.4 运行
source环境变量
source install/setup.zsh
运行命令
ros2 launch topic tutorials.topic.demo6_member_function_with_unique_network_flow_endpoints_test.launch.py