No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | ROS2 navigaiton tutorials and do quadruped robot |
| Checkout URI | https://github.com/duyongquan/openrobotics.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-01-16 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
TODO: Package description
Additional Links
No additional links.
Maintainers
- quan
Authors
No additional authors.
1 tutorial 1(member_functions_test)
1.1 功能介绍
客户端fibonacci请求,服务器fibonacci生成fibonacci数据
fibonacci: 1, 2, 3, 5, 8,13, …
1.2 代码
头文件tutorials_action_demo1_member_functions.hpp
class MinimalActionClient : public rclcpp::Node
{
public:
using Fibonacci = tutorials_msgs::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ClientGoalHandle<Fibonacci>;
explicit MinimalActionClient(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions());
bool is_goal_done() const;
void send_goal();
private:
void goal_response_callback(GoalHandleFibonacci::SharedPtr goal_handle);
void feedback_callback(
GoalHandleFibonacci::SharedPtr,
const std::shared_ptr<const Fibonacci::Feedback> feedback);
void result_callback(const GoalHandleFibonacci::WrappedResult & result);
rclcpp_action::Client<Fibonacci>::SharedPtr client_ptr_;
rclcpp::TimerBase::SharedPtr timer_;
bool goal_done_;
}; // class MinimalActionClient
//#####################################################################################
class MinimalActionServer : public rclcpp::Node
{
public:
using Fibonacci = tutorials_msgs::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ServerGoalHandle<Fibonacci>;
explicit MinimalActionServer(const rclcpp::NodeOptions & options = rclcpp::NodeOptions());
private:
rclcpp_action::Server<Fibonacci>::SharedPtr action_server_;
rclcpp_action::GoalResponse handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const Fibonacci::Goal> goal);
rclcpp_action::CancelResponse handle_cancel(
const std::shared_ptr<GoalHandleFibonacci> goal_handle);
void execute(const std::shared_ptr<GoalHandleFibonacci> goal_handle);
void handle_accepted(const std::shared_ptr<GoalHandleFibonacci> goal_handle);
}; // class MinimalActionServer
tutorials_action_demo1_member_functions.cpp
MinimalActionClient::MinimalActionClient(const rclcpp::NodeOptions & node_options)
: Node("minimal_action_client", node_options),
goal_done_(false)
{
this->client_ptr_ = rclcpp_action::create_client<Fibonacci>(
this->get_node_base_interface(),
this->get_node_graph_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"fibonacci");
this->timer_ = this->create_wall_timer(
std::chrono::milliseconds(500),
std::bind(&MinimalActionClient::send_goal, this));
}
bool MinimalActionClient::is_goal_done() const
{
return this->goal_done_;
}
void MinimalActionClient::send_goal()
{
using namespace std::placeholders;
this->timer_->cancel();
this->goal_done_ = false;
if (!this->client_ptr_) {
RCLCPP_ERROR(this->get_logger(), "Action client not initialized");
}
if (!this->client_ptr_->wait_for_action_server(std::chrono::seconds(10))) {
RCLCPP_ERROR(this->get_logger(), "Action server not available after waiting");
this->goal_done_ = true;
return;
}
auto goal_msg = Fibonacci::Goal();
goal_msg.order = 10;
RCLCPP_INFO(this->get_logger(), "Sending goal");
auto send_goal_options = rclcpp_action::Client<Fibonacci>::SendGoalOptions();
send_goal_options.goal_response_callback =
std::bind(&MinimalActionClient::goal_response_callback, this, _1);
send_goal_options.feedback_callback =
std::bind(&MinimalActionClient::feedback_callback, this, _1, _2);
send_goal_options.result_callback =
std::bind(&MinimalActionClient::result_callback, this, _1);
auto goal_handle_future = this->client_ptr_->async_send_goal(goal_msg, send_goal_options);
}
void MinimalActionClient::goal_response_callback(GoalHandleFibonacci::SharedPtr goal_handle)
{
if (!goal_handle) {
RCLCPP_ERROR(this->get_logger(), "Goal was rejected by server");
} else {
RCLCPP_INFO(this->get_logger(), "Goal accepted by server, waiting for result");
}
}
void MinimalActionClient::feedback_callback(
GoalHandleFibonacci::SharedPtr,
const std::shared_ptr<const Fibonacci::Feedback> feedback)
{
RCLCPP_INFO(
this->get_logger(),
"Next number in sequence received: %" PRId32, feedback->sequence.back());
}
void MinimalActionClient::result_callback(const GoalHandleFibonacci::WrappedResult & result)
{
this->goal_done_ = true;
switch (result.code) {
case rclcpp_action::ResultCode::SUCCEEDED:
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_ERROR(this->get_logger(), "Goal was aborted");
return;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_ERROR(this->get_logger(), "Goal was canceled");
return;
default:
RCLCPP_ERROR(this->get_logger(), "Unknown result code");
return;
}
RCLCPP_INFO(this->get_logger(), "Result received");
for (auto number : result.result->sequence) {
RCLCPP_INFO(this->get_logger(), "%" PRId32, number);
}
}
//#####################################################################################
MinimalActionServer::MinimalActionServer(const rclcpp::NodeOptions & options)
: Node("minimal_action_server", options)
{
using namespace std::placeholders;
this->action_server_ = rclcpp_action::create_server<Fibonacci>(
this->get_node_base_interface(),
this->get_node_clock_interface(),
this->get_node_logging_interface(),
this->get_node_waitables_interface(),
"fibonacci",
std::bind(&MinimalActionServer::handle_goal, this, _1, _2),
std::bind(&MinimalActionServer::handle_cancel, this, _1),
std::bind(&MinimalActionServer::handle_accepted, this, _1));
}
rclcpp_action::GoalResponse MinimalActionServer::handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr<const Fibonacci::Goal> goal)
{
RCLCPP_INFO(this->get_logger(), "Received goal request with order %d", goal->order);
(void)uuid;
// Let's reject sequences that are over 9000
if (goal->order > 9000) {
return rclcpp_action::GoalResponse::REJECT;
}
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}
rclcpp_action::CancelResponse MinimalActionServer::handle_cancel(
const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Received request to cancel goal");
(void)goal_handle;
return rclcpp_action::CancelResponse::ACCEPT;
}
void MinimalActionServer::execute(const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
RCLCPP_INFO(this->get_logger(), "Executing goal");
rclcpp::Rate loop_rate(1);
const auto goal = goal_handle->get_goal();
auto feedback = std::make_shared<Fibonacci::Feedback>();
auto & sequence = feedback->sequence;
sequence.push_back(0);
sequence.push_back(1);
auto result = std::make_shared<Fibonacci::Result>();
for (int i = 1; (i < goal->order) && rclcpp::ok(); ++i) {
// Check if there is a cancel request
if (goal_handle->is_canceling()) {
result->sequence = sequence;
goal_handle->canceled(result);
RCLCPP_INFO(this->get_logger(), "Goal Canceled");
return;
}
// Update sequence
sequence.push_back(sequence[i] + sequence[i - 1]);
// Publish feedback
goal_handle->publish_feedback(feedback);
RCLCPP_INFO(this->get_logger(), "Publish Feedback");
loop_rate.sleep();
}
// Check if goal is done
if (rclcpp::ok()) {
result->sequence = sequence;
goal_handle->succeed(result);
RCLCPP_INFO(this->get_logger(), "Goal Succeeded");
}
}
void MinimalActionServer::handle_accepted(const std::shared_ptr<GoalHandleFibonacci> goal_handle)
{
using namespace std::placeholders;
// this needs to return quickly to avoid blocking the executor, so spin up a new thread
std::thread{std::bind(&MinimalActionServer::execute, this, _1), goal_handle}.detach();
}
测试文件tutorials_action_demo1_member_functions_client_test.cpp
#include "action/tutorials_action_demo1_member_functions.hpp"
// int main(int argc, char * argv[])
// {
// rclcpp::init(argc, argv);
// rclcpp::executors::MultiThreadedExecutor executor;
// auto action_server = std::make_shared<ros2_tutorials::action::MinimalActionServer>();
// auto action_client = std::make_shared<ros2_tutorials::action::MinimalActionClient>();
// while (!action_client->is_goal_done()) {
// executor.add_node(action_server);
// executor.add_node(action_client);
// }
// executor.spin();
// rclcpp::shutdown();
// return 0;
// }
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_server = std::make_shared<ros2_tutorials::action::MinimalActionClient>();
rclcpp::spin(action_server);
rclcpp::shutdown();
return 0;
}
测试文件tutorials_action_demo1_member_functions_server_test.cpp
#include "action/tutorials_action_demo1_member_functions.hpp"
// int main(int argc, char * argv[])
// {
// rclcpp::init(argc, argv);
// rclcpp::executors::MultiThreadedExecutor executor;
// auto action_server = std::make_shared<ros2_tutorials::action::MinimalActionServer>();
// auto action_client = std::make_shared<ros2_tutorials::action::MinimalActionClient>();
// while (!action_client->is_goal_done()) {
// executor.add_node(action_server);
// executor.add_node(action_client);
// }
// executor.spin();
// rclcpp::shutdown();
// return 0;
// }
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_server = std::make_shared<ros2_tutorials::action::MinimalActionServer>();
rclcpp::spin(action_server);
rclcpp::shutdown();
return 0;
}
1.3 编译
colcon build --packages-up-to action
1.4 运行
source环境变量
source install/setup.zsh
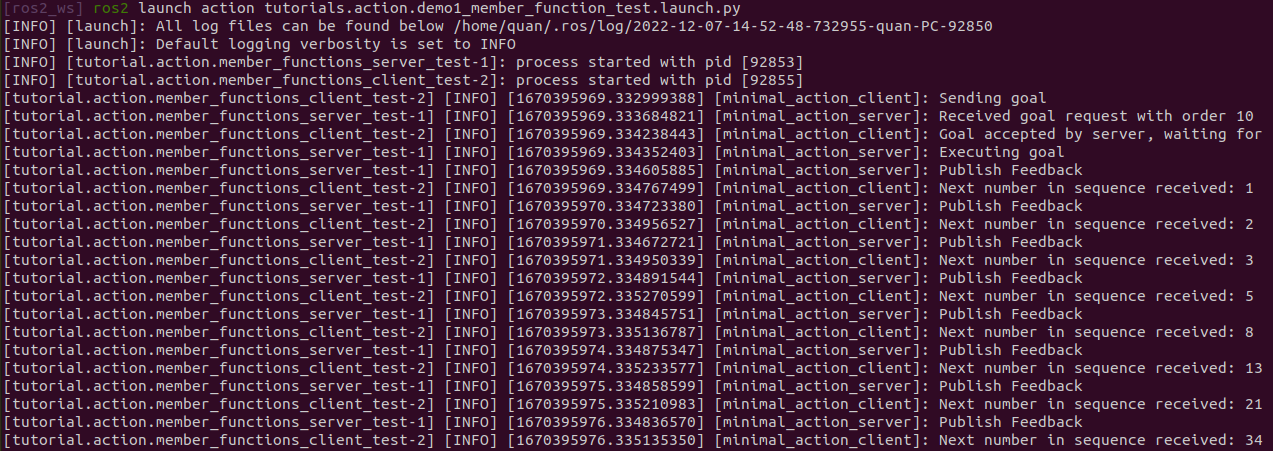
ros2 launch action tutorials.action.demo1_member_function_test.launch.py
1.5 运行结果
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Package Dependencies
| Deps | Name |
|---|---|
| tutorials_msgs | |
| rclcpp | |
| std_msgs | |
| rclcpp_action | |
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
No direct system dependencies.
Dependant Packages
| Name | Deps |
|---|---|
| rosgpt | |
| rosgpt | |
| sjtu_drone_bringup | |
| rosgpt_vision |
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged action at Robotics Stack Exchange
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.