
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.18 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-02-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
Background on lifecycle enabled nodes
Using ROS2’s managed/lifecycle nodes feature allows the system startup to ensure that all required nodes have been instantiated correctly before they begin their execution. Using lifecycle nodes also allows nodes to be restarted or replaced on-line. More details about managed nodes can be found on ROS2 Design website. Several nodes in Nav2, such as map_server, planner_server, and controller_server, are lifecycle enabled. These nodes provide the required overrides of the lifecycle functions:
on_configure()
,
on_activate()
,
on_deactivate()
,
on_cleanup()
,
on_shutdown()
, and
on_error()
.
See its Configuration Guide Page for additional parameter descriptions.
nav2_lifecycle_manager
Nav2’s lifecycle manager is used to change the states of the lifecycle nodes in order to achieve a controlled startup, shutdown, reset, pause, or resume of the navigation stack. The lifecycle manager presents a
lifecycle_manager/manage_nodes
service, from which clients can invoke the startup, shutdown, reset, pause, or resume functions. Based on this service request, the lifecycle manager calls the necessary lifecycle services in the lifecycle managed nodes. Currently, the RVIZ panel uses this
lifecycle_manager/manage_nodes
service when user presses the buttons on the RVIZ panel (e.g.,startup, reset, shutdown, etc.), but it is meant to be called on bringup through a production system application.
In order to start the navigation stack and be able to navigate, the necessary nodes must be configured and activated. Thus, for example when startup is requested from the lifecycle manager’s manage_nodes service, the lifecycle managers calls configure() and activate() on the lifecycle enabled nodes in the node list. These are all transitioned in ordered groups for bringup transitions, and reverse ordered groups for shutdown transitions.
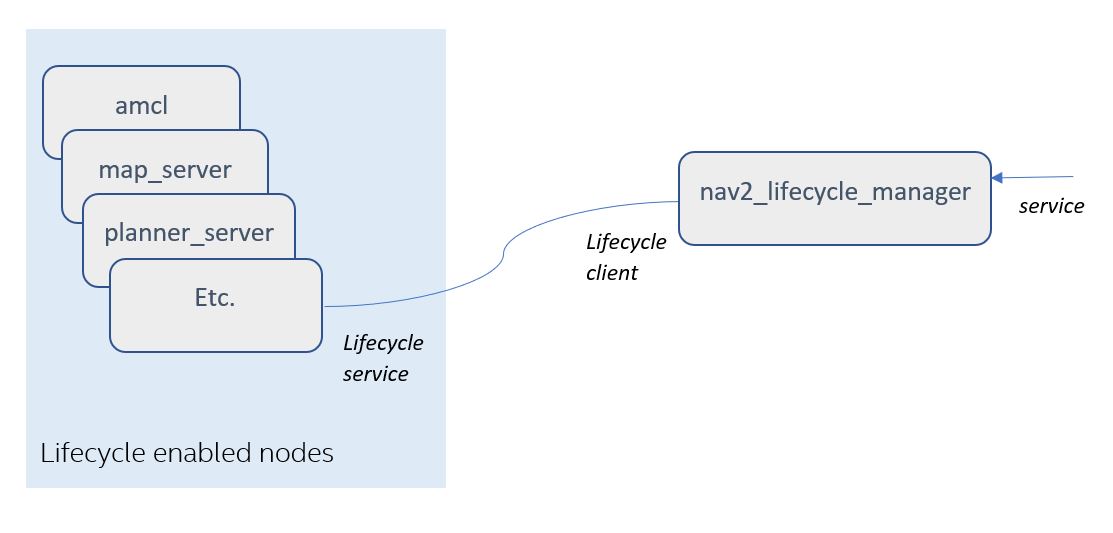
The lifecycle manager has a default nodes list for all the nodes that it manages. This list can be changed using the lifecycle manager’s “node_names” parameter.
The diagram below shows an example of a list of managed nodes, and how it interfaces with the lifecycle manager.
The UML diagram below shows the sequence of service calls once the startup is requested from the lifecycle manager.

Wiki Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_lifecycle_manager at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.3.5 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-02-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
Background on lifecycle enabled nodes
Using ROS2’s managed/lifecycle nodes feature allows the system startup to ensure that all required nodes have been instantiated correctly before they begin their execution. Using lifecycle nodes also allows nodes to be restarted or replaced on-line. More details about managed nodes can be found on ROS2 Design website. Several nodes in Nav2, such as map_server, planner_server, and controller_server, are lifecycle enabled. These nodes provide the required overrides of the lifecycle functions:
on_configure()
,
on_activate()
,
on_deactivate()
,
on_cleanup()
,
on_shutdown()
, and
on_error()
.
See its Configuration Guide Page for additional parameter descriptions.
nav2_lifecycle_manager
Nav2’s lifecycle manager is used to change the states of the lifecycle nodes in order to achieve a controlled startup, shutdown, reset, pause, or resume of the navigation stack. The lifecycle manager presents a
lifecycle_manager/manage_nodes
service, from which clients can invoke the startup, shutdown, reset, pause, or resume functions. Based on this service request, the lifecycle manager calls the necessary lifecycle services in the lifecycle managed nodes. Currently, the RVIZ panel uses this
lifecycle_manager/manage_nodes
service when user presses the buttons on the RVIZ panel (e.g.,startup, reset, shutdown, etc.), but it is meant to be called on bringup through a production system application.
In order to start the navigation stack and be able to navigate, the necessary nodes must be configured and activated. Thus, for example when startup is requested from the lifecycle manager’s manage_nodes service, the lifecycle managers calls configure() and activate() on the lifecycle enabled nodes in the node list. These are all transitioned in ordered groups for bringup transitions, and reverse ordered groups for shutdown transitions.
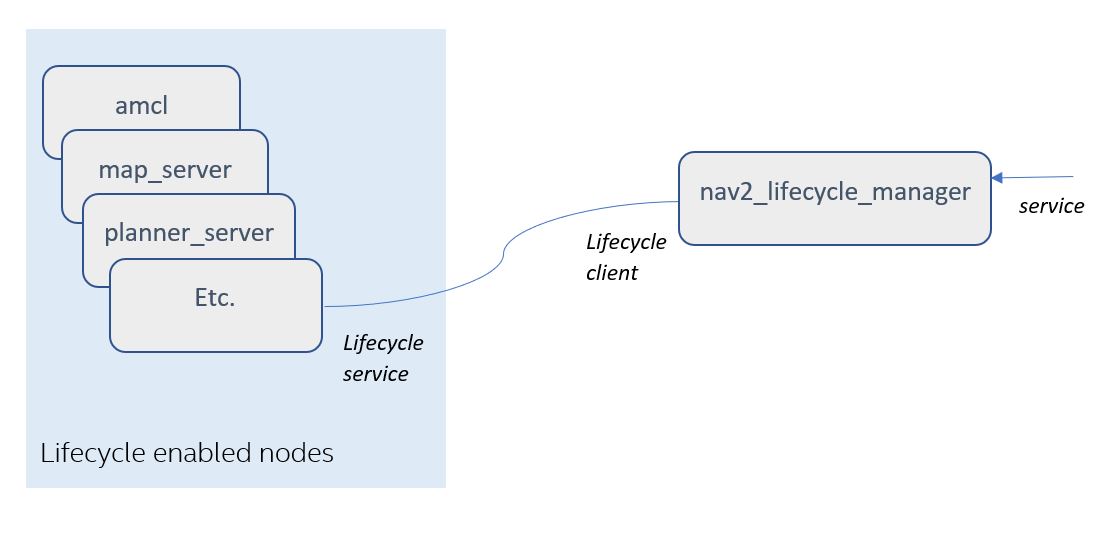
The lifecycle manager has a default nodes list for all the nodes that it manages. This list can be changed using the lifecycle manager’s “node_names” parameter.
The diagram below shows an example of a list of managed nodes, and how it interfaces with the lifecycle manager.
The UML diagram below shows the sequence of service calls once the startup is requested from the lifecycle manager.

Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_lifecycle_manager at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.12 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-09-15 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
Background on lifecycle enabled nodes
Using ROS2’s managed/lifecycle nodes feature allows the system startup to ensure that all required nodes have been instantiated correctly before they begin their execution. Using lifecycle nodes also allows nodes to be restarted or replaced on-line. More details about managed nodes can be found on ROS2 Design website. Several nodes in Nav2, such as map_server, planner_server, and controller_server, are lifecycle enabled. These nodes provide the required overrides of the lifecycle functions:
on_configure()
,
on_activate()
,
on_deactivate()
,
on_cleanup()
,
on_shutdown()
, and
on_error()
.
nav2_lifecycle_manager
Nav2’s lifecycle manager is used to change the states of the lifecycle nodes in order to achieve a controlled startup, shutdown, reset, pause, or resume of the navigation stack. The lifecycle manager presents a
lifecycle_manager/manage_nodes
service, from which clients can invoke the startup, shutdown, reset, pause, or resume functions. Based on this service request, the lifecycle manager calls the necessary lifecycle services in the lifecycle managed nodes. Currently, the RVIZ panel uses this
lifecycle_manager/manage_nodes
service when user presses the buttons on the RVIZ panel (e.g.,startup, reset, shutdown, etc.).
In order to start the navigation stack and be able to navigate, the necessary nodes must be configured and activated. Thus, for example when startup is requested from the lifecycle manager’s manage_nodes service, the lifecycle managers calls configure() and activate() on the lifecycle enabled nodes in the node list.
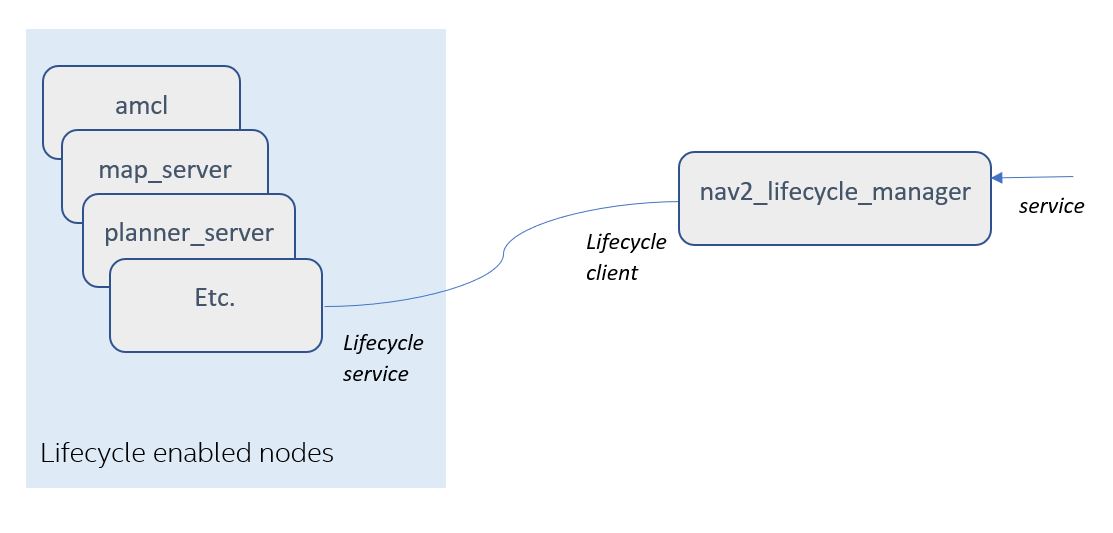
The lifecycle manager has a default nodes list for all the nodes that it manages. This list can be changed using the lifecycle manager’s “node_names” parameter.
The diagram below shows an example of a list of managed nodes, and how it interfaces with the lifecycle manager.
The UML diagram below shows the sequence of service calls once the startup is requested from the lifecycle manager.

Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_lifecycle_manager at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.2.10 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-10-02 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
Background on lifecycle enabled nodes
Using ROS2’s managed/lifecycle nodes feature allows the system startup to ensure that all required nodes have been instantiated correctly before they begin their execution. Using lifecycle nodes also allows nodes to be restarted or replaced on-line. More details about managed nodes can be found on ROS2 Design website. Several nodes in Nav2, such as map_server, planner_server, and controller_server, are lifecycle enabled. These nodes provide the required overrides of the lifecycle functions:
on_configure()
,
on_activate()
,
on_deactivate()
,
on_cleanup()
,
on_shutdown()
, and
on_error()
.
See its Configuration Guide Page for additional parameter descriptions.
nav2_lifecycle_manager
Nav2’s lifecycle manager is used to change the states of the lifecycle nodes in order to achieve a controlled startup, shutdown, reset, pause, or resume of the navigation stack. The lifecycle manager presents a
lifecycle_manager/manage_nodes
service, from which clients can invoke the startup, shutdown, reset, pause, or resume functions. Based on this service request, the lifecycle manager calls the necessary lifecycle services in the lifecycle managed nodes. Currently, the RVIZ panel uses this
lifecycle_manager/manage_nodes
service when user presses the buttons on the RVIZ panel (e.g.,startup, reset, shutdown, etc.), but it is meant to be called on bringup through a production system application.
In order to start the navigation stack and be able to navigate, the necessary nodes must be configured and activated. Thus, for example when startup is requested from the lifecycle manager’s manage_nodes service, the lifecycle managers calls configure() and activate() on the lifecycle enabled nodes in the node list. These are all transitioned in ordered groups for bringup transitions, and reverse ordered groups for shutdown transitions.
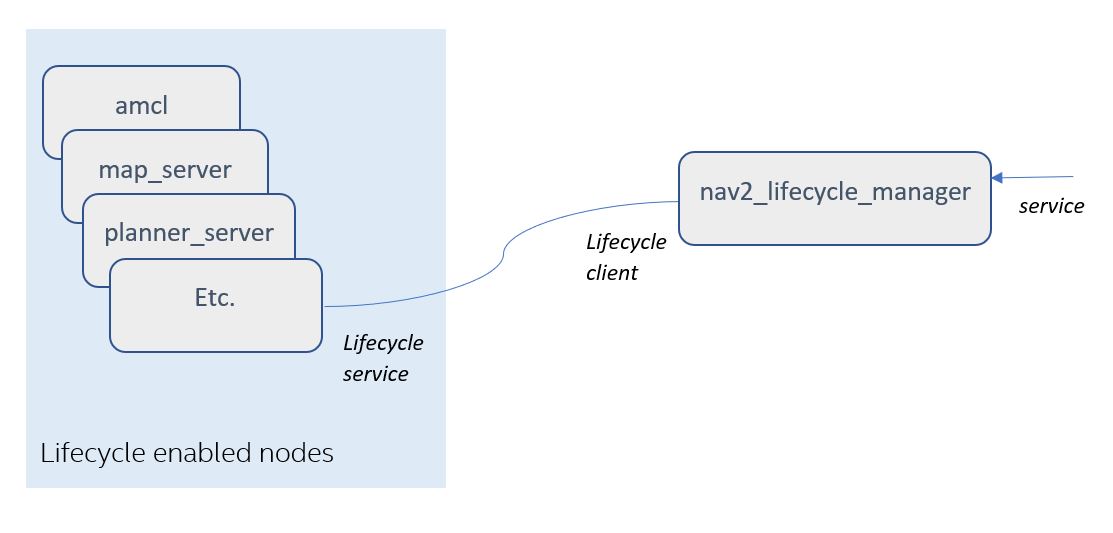
The lifecycle manager has a default nodes list for all the nodes that it manages. This list can be changed using the lifecycle manager’s “node_names” parameter.
The diagram below shows an example of a list of managed nodes, and how it interfaces with the lifecycle manager.
The UML diagram below shows the sequence of service calls once the startup is requested from the lifecycle manager.
