
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
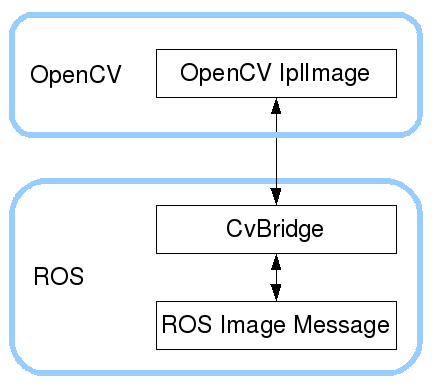
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.16.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2024-08-20 |
| Dev Status | MAINTAINED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.16.2 (2022-10-03)
1.16.1 (2022-09-06)
- Fix 16U encoding type (#445)
- Add header arg to cv2_to_imgmsg (#326)
- Contributors: Ibrahim Essam, Kenji Brameld, Naoya Yamaguchi
1.16.0 (2021-11-23)
- prevent conversion of single channel 16bit integer images to/from colour (#412)
- decode images in mode IMREAD_UNCHANGED (#228)
- Optimize includes (#354) As suggested by include-what-you-use
- Fix Python linking on OSX (#331)
- Fix typo (#333)
- Contributors: Christian Rauch, Markus Vieth, Matthijs van der Burgh, Tobias Fischer
1.15.0 (2020-05-19)
- [Noetic] Use opencv3 on buster (#330)
- more portable fixes. (#328)
- Contributors: Sean Yen, Shane Loretz
1.14.0 (2020-04-06)
- Noetic release (#323)
- update CMakeLists.txt for Windows build environment (#265)
- remove path splash separator from 'package_dir' (#267)
- fix travis. (#269)
- Contributors: Alejandro Hernández Cordero, James Xu, Sean Yen
1.13.0 (2018-04-30)
- Use rosdep OpenCV and not ROS one. We defintely don't need the whole OpenCV. We need to clean the rosdep keys.
- Contributors: Vincent Rabaud
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.1.3 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-10-15 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.1.3 (2022-10-15)
- Add message to print out Boost_VERSION_STRING, and apply with CMP0093
- Fix RHEL buildfailure with Boost 1.66.0
- Contributors: Kenji Brameld
3.1.2 (2022-09-21)
- Fix windows build when Boost 1.67 or newer (#489)
- Contributors: Kenji Brameld
3.1.1 (2022-09-17)
- Revert API breakages
- Contributors: Kenji Brameld
3.1.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#482)
- Fix 16U encoding type (#462)
- Reorganize author tag (#468)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Update README.md (#252)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.5.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-04-13 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.5.0 (2024-04-13)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.13.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2022-10-03 |
| Dev Status | MAINTAINED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.13.1 (2022-10-03)
- Fix endian mismatch issue per boostorg/python PR #218
- Update CMakeLists.txt for Windows build environment (#265)
- Remove path splash separator from 'package_dir' (#267)
- Fix travis. (#269)
- Contributors: Duan Yutong, James Xu, Kenji Brameld, Sean Yen
1.13.0 (2018-04-30)
- Use rosdep OpenCV and not ROS one. We defintely don't need the whole OpenCV. We need to clean the rosdep keys.
- Contributors: Vincent Rabaud
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
- split the conversion tests out of enumerants
- support is_bigendian in Python Fixes #114 Also fixes mono16 test
- Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
- Add CvtColorForDisplayOptions with new colormap param
- fix doc jobs
- Add python binding for cv_bridge::cvtColorForDisplay
- Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
- Fix compilation of cv_bridge with opencv3 and python3.
- Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
1.12.0 (2016-03-18)
- depend on OpenCV3 only
- Contributors: Vincent Rabaud
1.11.12 (2016-03-10)
- Fix my typo
- Remove another eval Because [cvtype2_to_dtype_with_channels('8UCimport os; os.system("rm -rf /")')]{.title-ref} should never have a chance of happening.
- Remove eval, and other fixes Also, extend from object, so as not to get a python 2.2-style class, and use the new-style raise statement
- Contributors: Eric Wieser
1.11.11 (2016-01-31)
- clean up the doc files
- fix a few warnings in doc jobs
- Contributors: Vincent Rabaud
1.11.10 (2016-01-16)
- fix OpenCV3 build
- Describe about converting label to bgr image in cvtColorForDisplay
- Convert label to BGR image to display
- Add test for rgb_colors.cpp
- Add rgb_colors util
- Update doc for converting to BGR in cvtColorForDisplay
- Convert to BGR from any encoding
- Refactor: sensor_msgs::image_encodings -> enc
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.9 (2015-11-29)
- deal with endianness
- add cvtColorForDisplay
- Improved efficiency by using toCvShare instead of toCvCopy.
- Add format enum for easy use and choose format.
- fix compilation warnings
- start to extend the cv_bridge with cvCompressedImage class, that will convert from cv::Mat opencv images to CompressedImage ros messages and vice versa
- Contributors: Carlos Costa, Vincent Rabaud, talregev
1.11.8 (2015-07-15)
- Simplify some OpenCV3 distinction
- fix tests
- fix test under OpenCV3
- Remove Python for Android
- Contributors: Gary Servin, Vincent Rabaud
1.11.7 (2014-12-14)
- check that the type is indeed a Numpy one This is in response to #51
- Contributors: Vincent Rabaud
1.11.6 (2014-11-16)
- chnage the behavior when there is only one channel
- cleanup tests
- Contributors: Vincent Rabaud
1.11.5 (2014-09-21)
- get code to work with OpenCV3 actually fixes #46 properly
- Contributors: Vincent Rabaud
1.11.4 (2014-07-27)
- Fix #42
- Contributors: Libor Wagner
1.11.3 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.11.2 (2014-04-28)
- Add depend on python for cv_bridge
- Contributors: Scott K Logan
1.11.1 (2014-04-16)
- fixes #34
- Contributors: Vincent Rabaud
1.11.0 (2014-02-15)
- remove deprecated API and fixes #33
- fix OpenCV dependencies
- Contributors: Vincent Rabaud
1.10.15 (2014-02-07)
- fix python 3 error at configure time
- Contributors: Dirk Thomas
1.10.14 (2013-11-23 16:17)
- update changelog
- Find NumPy include directory
- Contributors: Brian Jensen, Vincent Rabaud
1.10.13 (2013-11-23 09:19)
- fix compilation on older NumPy
- Contributors: Vincent Rabaud
1.10.12 (2013-11-22)
- bump changelog
- Fixed issue with image message step size
- fix crash for non char data
- fix #26
- Contributors: Brian Jensen, Vincent Rabaud
1.10.11 (2013-10-23)
- fix bad image check and improve it too
- Contributors: Vincent Rabaud
1.10.10 (2013-10-19)
- fixes #25
- Contributors: Vincent Rabaud
1.10.9 (2013-10-07)
- fixes #20
- Contributors: Vincent Rabaud
1.10.8 (2013-09-09)
- fixes #22
- fixes #17
- check for CATKIN_ENABLE_TESTING
- fixes #16
- update email address
- Contributors: Lukas Bulwahn, Vincent Rabaud
1.10.7 (2013-07-17)
1.10.6 (2013-03-01)
- make sure conversion are applied for depth differences
- Contributors: Vincent Rabaud
1.10.5 (2013-02-11)
1.10.4 (2013-02-02)
- fix installation of the boost package
- Contributors: Vincent Rabaud
1.10.3 (2013-01-17)
- Link against PTYHON_LIBRARIES
- Contributors: William Woodall
1.10.2 (2013-01-13)
- use CATKIN_DEVEL_PREFIX instead of obsolete CATKIN_BUILD_PREFIX
- Contributors: Dirk Thomas
1.10.1 (2013-01-10)
- add licenses
- fixes #5 by removing the logic from Python and using wrapped C++ and adding a test for it
- fix a bug discovered when running the opencv_tests
- use some C++ logic
- add a Boost Python module to have the C++ logix used directly in Python
- Contributors: Vincent Rabaud
1.10.0 (2013-01-03)
- add conversion from Bayer to gray
- Contributors: Vincent Rabaud
1.9.15 (2013-01-02)
- use the reverted isColor behavior
- Contributors: Vincent Rabaud
1.9.14 (2012-12-30)
1.9.13 (2012-12-15)
- use the catkin macros for the setup.py
- fix #3
- Contributors: Vincent Rabaud
1.9.12 (2012-12-14)
- buildtool_depend catkin fix
- CMakeLists.txt clean up.
- Contributors: William Woodall
1.9.11 (2012-12-10)
- fix issue #1
- Cleanup of package.xml
- Contributors: Vincent Rabaud, William Woodall
1.9.10 (2012-10-04)
- fix the bad include folder
- Contributors: Vincent Rabaud
1.9.9 (2012-10-01)
- fix dependencies
- Contributors: Vincent Rabaud
1.9.8 (2012-09-30)
- fix some dependencies
- add rosconsole as a dependency
- fix missing Python at install and fix some dependencies
- Contributors: Vincent Rabaud
1.9.7 (2012-09-28 21:07)
- add missing stuff
- make sure we find catkin
- Contributors: Vincent Rabaud
1.9.6 (2012-09-28 15:17)
- move the test to where it belongs
- fix the tests and the API to not handle conversion from CV_TYPE to Color type (does not make sense)
- comply to the new Catkin API
- backport the YUV422 bug fix from Fuerte
- apply patch from https://code.ros.org/trac/ros-pkg/ticket/5556
- Contributors: Vincent Rabaud
1.9.5 (2012-09-15)
- remove dependencies to the opencv2 ROS package
- Contributors: Vincent Rabaud
1.9.4 (2012-09-13)
- make sure the include folders are copied to the right place
- Contributors: Vincent Rabaud
1.9.3 (2012-09-12)
1.9.2 (2012-09-07)
- be more compliant to the latest catkin
- added catkin_project() to cv_bridge, image_geometry, and opencv_tests
- Contributors: Jonathan Binney, Vincent Rabaud
1.9.1 (2012-08-28 22:06)
- remove things that were marked as ROS_DEPRECATED
- Contributors: Vincent Rabaud
1.9.0 (2012-08-28 14:29)
- catkinized opencv_tests by Jon Binney
- catkinized cv_bridge package... others disable for now by Jon Binney
- remove the version check, let's trust OpenCV :)
- revert the removal of opencv2
- vision_opencv: Export OpenCV flags in manifests for image_geometry, cv_bridge.
- finally get rid of opencv2 as it is a system dependency now
- bump REQUIRED version of OpenCV to 2.3.2, which is what's in ros-fuerte-opencv
- switch rosdep name to opencv2, to refer to ros-fuerte-opencv2
- added missing header
- Added constructor to CvImage to make converting a cv::Mat to sensor_msgs::Image less verbose.
- cv_bridge: Added unit test for #5206
- cv_bridge: Applied patch from mdesnoyer to fix handling of non-continuous OpenCV images. #5206
- Adding opencv2 to all manifests, so that client packages may not break when using them.
- baking in opencv debs and attempting a pre-release
- cv_bridge: Support for new 16-bit encodings.
- cv_bridge: Deprecate old C++ cv_bridge API.
- cv_bridge: Correctly scale for MONO8 <-> MONO16 conversions.
- cv_bridge: Fixed issue where pointer version to toCvCopy would ignore the requested encoding (http://answers.ros.org/question/258/converting-kinect-rgb-image-to-opencv-gives-wrong).
- fixed doc build by taking a static snapshot
- cv_bridge: Marking doc reviewed.
- cv_bridge: Tweaks to make docs look better.
- cv_bridge: Added cvtColor(). License notices. Documented that CvBridge class is obsolete.
- cv_bridge: Added redesigned C++ cv_bridge.
- Doc cleanup
- Trigger doc rebuild
- mono16 -> bgr conversion tested and fixed in C
- Added Ubuntu platform tags to manifest
- Handle mono16 properly
- Raise exception when imgMsgToCv() gets an image encoding it does not recognise, #3489
- Remove use of deprecated rosbuild macros
- Fixed example
- cv_bridge split from opencv2
- Contributors: Vincent Rabaud, ethanrublee, gerkey, jamesb, mihelich, vrabaud, wheeler