Package Summary
| Tags | No category tags. |
| Version | 1.8.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_msgs.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-21 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | ros ros2 autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Mete Fatih Cırıt
- Yutaka Kondo
- Ryohsuke Mitsudome
Authors
- Koji Minoda
autoware_map_msgs
AreaInfo.msg
The message represents an area information. This is intended to be used as a query for partial / differential map loading (see GetPartialPointCloudMap.srv and GetDifferentialPointCloudMap.srv section).
PointCloudMapCellWithID.msg
The message contains a pointcloud data attached with an ID.
PointCloudMapCellMetaDataWithID.msg
The message contains a pointcloud meta data attached with an ID. These IDs are intended to be used as a query for selected PCD map loading (see GetSelectedPointCloudMap.srv section).
MapProjectorInfo.msg
The message contains the information required to project global coordinates to local coordinates used by Autoware, which includes the name of the projection method and the parameters for the projection. For further information, please refer to the readme of map_projection_loader in Autoware Universe.
GetPartialPointCloudMap.srv
Given an area query (AreaInfo), the response is expected to contain the PCD maps (each of which attached with unique ID) whose area overlaps with the query.
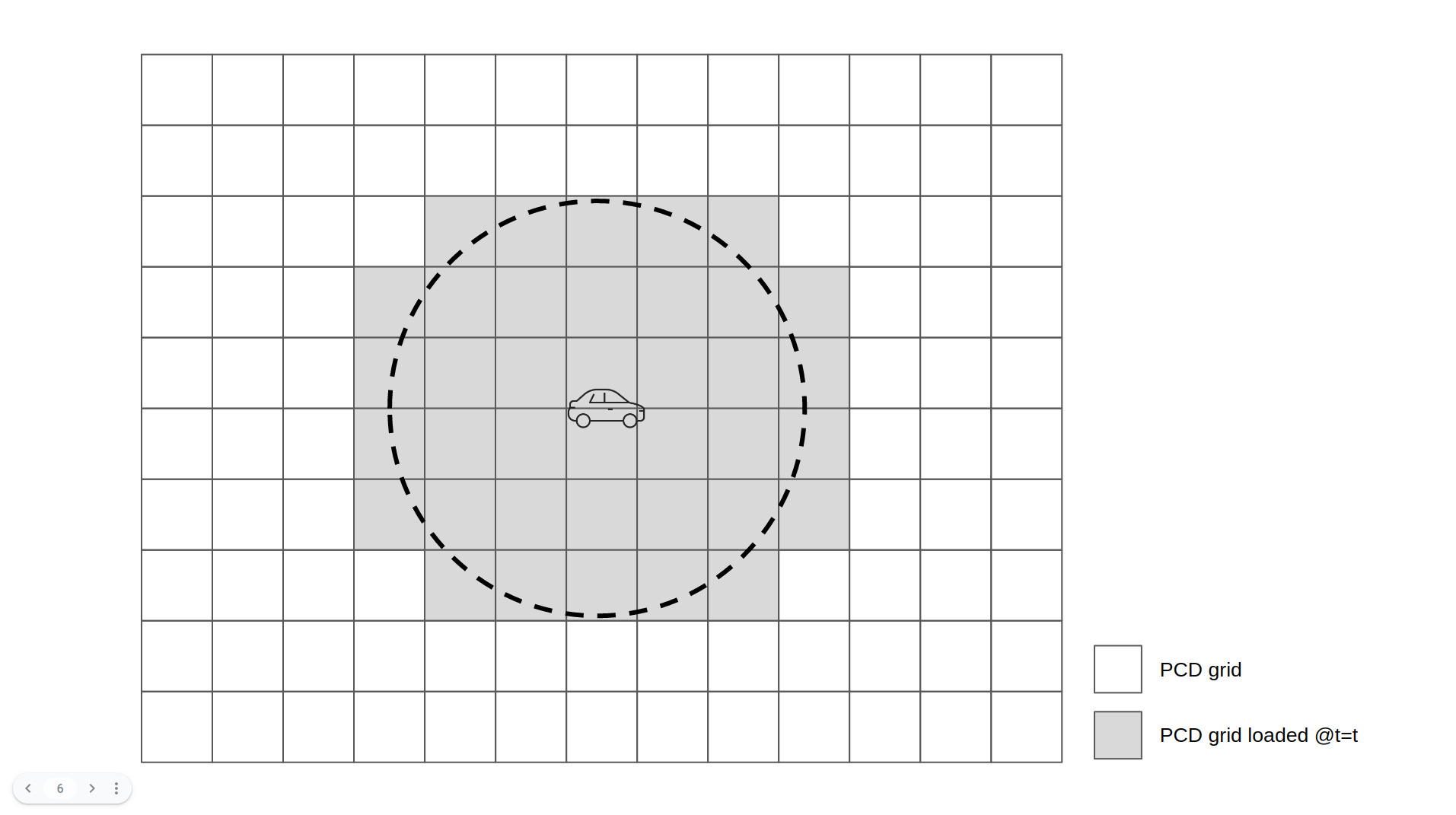
GetDifferentialPointCloudMap.srv
Given an area query and the IDs that the client node already has, the response is expected to contain the PCD maps (each of which attached with unique ID) that…
- overlaps with the area query
- is not possessed by the client node
Let $X_0$ be a set of PCD map ID that the client node has, $X_1$ be a set of PCD map ID that overlaps with the area query, ${\rm pcd}(id)$ be a function that returns PCD data that corresponds to ID $id$. In this case, the response would be
-
loaded_pcds: $\lbrace [id,{\rm pcd}(id)]~~id \in X_1 \backslash X_0 \rbrace$ -
ids_to_remove: $\lbrace id~~id \in X_0 \backslash X_1 \rbrace$
( $x \in A\backslash B \iff x \in A \wedge x \notin B$ )
GetSelectedPointCloudMap.srv
Given IDs query, the response is expected to contain the PCD maps (each of which attached with unique ID) specified by query. Before using this interface, the client is expected to receive the PointCloudMapCellMetaDataWithID.msg metadata to retrieve information about IDs.
Changelog for package autoware_map_msgs
1.8.0 (2025-05-21)
1.7.0 (2025-04-21)
1.6.0 (2025-04-07)
1.5.0 (2025-04-02)
- feat(autoware_msg_msgs): add scale factor remove altitude
(#121)
- add_scale_factor_remove_altitude
* add newline ---------
- Contributors: Yamato Ando
1.4.0 (2025-02-25)
- feat(MapProjectorInfo.msg): add LocalCartesian const (#118)
- fix(autoware_msgs): fix links to issues in CHANGELOG.rst files (#108)
- Contributors: Esteve Fernandez, Sebastian Zęderowski
1.3.0 (2024-11-25)
- feat(autoware_map_msgs): add MapProjectorInfo message (#102)
- Contributors: Ryohsuke Mitsudome
1.2.0 (2024-10-01)
- feat(autoware_map_msgs): add msg and srv files releated with dynamic lanelet loading (#81)
- Contributors: Barış Zeren, Ryohsuke Mitsudome, Yamato Ando
1.1.0 (2024-05-10)
- chore: update [package.xml]{.title-ref} and fix [CMakeLists.txt]{.title-ref} (#91) update package.xml and fix cmakefiles
- feat(autoware_map_msgs): support cylindrical AreaInfo
(#64)
- feat(autoware_map_msgs): support cylindrical AreaInfo
* update attribute ---------
- feat(autoware_map_msgs): add selected map loading
(#57)
- feat(map_loader): add support for sequential_map_loading
- feat(autoware_map_msgs): add PointCloudMetaData.msg
- docs(autoware_map_msgs): add description of selected_map_loading
- docs(autoware_map_msgs): remove gif for selected_map_loading
- docs(autoware_map_msgs): fix typo
- feat(autoware_map_msgs): make member of msg plural
- docs(autoware_map_msgs): clarify the client needs to receive msg beforehand
* docs(autoware_map_msgs): clarify IDs included in msgs are used as query for service ---------
- feat(autoware_map_msgs): add grid coordinates in
PointCloudMapCellWithID.msg
(#52)
- feat(autoware_map_msgs): add grid coordinates in PointCloudMapCellWithID.msg
- style(pre-commit): autofix
* debug
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(map-messages): add LaneletMapBin.msg (#30)
- feat: add autoware_map_msgs for dynamic map loading (#39) Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- Contributors: M. Fatih Cırıt, Shintaro Tomie, Yutaka Kondo, kminoda
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| rosidl_default_generators | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common | |
| geographic_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| std_msgs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| autoware_msgs | |
| autoware_lanelet2_extension |
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.8.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_msgs.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-21 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | ros ros2 autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Mete Fatih Cırıt
- Yutaka Kondo
- Ryohsuke Mitsudome
Authors
- Koji Minoda
autoware_map_msgs
AreaInfo.msg
The message represents an area information. This is intended to be used as a query for partial / differential map loading (see GetPartialPointCloudMap.srv and GetDifferentialPointCloudMap.srv section).
PointCloudMapCellWithID.msg
The message contains a pointcloud data attached with an ID.
PointCloudMapCellMetaDataWithID.msg
The message contains a pointcloud meta data attached with an ID. These IDs are intended to be used as a query for selected PCD map loading (see GetSelectedPointCloudMap.srv section).
MapProjectorInfo.msg
The message contains the information required to project global coordinates to local coordinates used by Autoware, which includes the name of the projection method and the parameters for the projection. For further information, please refer to the readme of map_projection_loader in Autoware Universe.
GetPartialPointCloudMap.srv
Given an area query (AreaInfo), the response is expected to contain the PCD maps (each of which attached with unique ID) whose area overlaps with the query.
GetDifferentialPointCloudMap.srv
Given an area query and the IDs that the client node already has, the response is expected to contain the PCD maps (each of which attached with unique ID) that…
- overlaps with the area query
- is not possessed by the client node
Let $X_0$ be a set of PCD map ID that the client node has, $X_1$ be a set of PCD map ID that overlaps with the area query, ${\rm pcd}(id)$ be a function that returns PCD data that corresponds to ID $id$. In this case, the response would be
-
loaded_pcds: $\lbrace [id,{\rm pcd}(id)]~~id \in X_1 \backslash X_0 \rbrace$ -
ids_to_remove: $\lbrace id~~id \in X_0 \backslash X_1 \rbrace$
( $x \in A\backslash B \iff x \in A \wedge x \notin B$ )
GetSelectedPointCloudMap.srv
Given IDs query, the response is expected to contain the PCD maps (each of which attached with unique ID) specified by query. Before using this interface, the client is expected to receive the PointCloudMapCellMetaDataWithID.msg metadata to retrieve information about IDs.
Changelog for package autoware_map_msgs
1.8.0 (2025-05-21)
1.7.0 (2025-04-21)
1.6.0 (2025-04-07)
1.5.0 (2025-04-02)
- feat(autoware_msg_msgs): add scale factor remove altitude
(#121)
- add_scale_factor_remove_altitude
* add newline ---------
- Contributors: Yamato Ando
1.4.0 (2025-02-25)
- feat(MapProjectorInfo.msg): add LocalCartesian const (#118)
- fix(autoware_msgs): fix links to issues in CHANGELOG.rst files (#108)
- Contributors: Esteve Fernandez, Sebastian Zęderowski
1.3.0 (2024-11-25)
- feat(autoware_map_msgs): add MapProjectorInfo message (#102)
- Contributors: Ryohsuke Mitsudome
1.2.0 (2024-10-01)
- feat(autoware_map_msgs): add msg and srv files releated with dynamic lanelet loading (#81)
- Contributors: Barış Zeren, Ryohsuke Mitsudome, Yamato Ando
1.1.0 (2024-05-10)
- chore: update [package.xml]{.title-ref} and fix [CMakeLists.txt]{.title-ref} (#91) update package.xml and fix cmakefiles
- feat(autoware_map_msgs): support cylindrical AreaInfo
(#64)
- feat(autoware_map_msgs): support cylindrical AreaInfo
* update attribute ---------
- feat(autoware_map_msgs): add selected map loading
(#57)
- feat(map_loader): add support for sequential_map_loading
- feat(autoware_map_msgs): add PointCloudMetaData.msg
- docs(autoware_map_msgs): add description of selected_map_loading
- docs(autoware_map_msgs): remove gif for selected_map_loading
- docs(autoware_map_msgs): fix typo
- feat(autoware_map_msgs): make member of msg plural
- docs(autoware_map_msgs): clarify the client needs to receive msg beforehand
* docs(autoware_map_msgs): clarify IDs included in msgs are used as query for service ---------
- feat(autoware_map_msgs): add grid coordinates in
PointCloudMapCellWithID.msg
(#52)
- feat(autoware_map_msgs): add grid coordinates in PointCloudMapCellWithID.msg
- style(pre-commit): autofix
* debug
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(map-messages): add LaneletMapBin.msg (#30)
- feat: add autoware_map_msgs for dynamic map loading (#39) Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- Contributors: M. Fatih Cırıt, Shintaro Tomie, Yutaka Kondo, kminoda
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| rosidl_default_generators | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common | |
| geographic_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| std_msgs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| autoware_msgs | |
| autoware_lanelet2_extension |
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.8.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_msgs.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-21 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | ros ros2 autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Mete Fatih Cırıt
- Yutaka Kondo
- Ryohsuke Mitsudome
Authors
- Koji Minoda
autoware_map_msgs
AreaInfo.msg
The message represents an area information. This is intended to be used as a query for partial / differential map loading (see GetPartialPointCloudMap.srv and GetDifferentialPointCloudMap.srv section).
PointCloudMapCellWithID.msg
The message contains a pointcloud data attached with an ID.
PointCloudMapCellMetaDataWithID.msg
The message contains a pointcloud meta data attached with an ID. These IDs are intended to be used as a query for selected PCD map loading (see GetSelectedPointCloudMap.srv section).
MapProjectorInfo.msg
The message contains the information required to project global coordinates to local coordinates used by Autoware, which includes the name of the projection method and the parameters for the projection. For further information, please refer to the readme of map_projection_loader in Autoware Universe.
GetPartialPointCloudMap.srv
Given an area query (AreaInfo), the response is expected to contain the PCD maps (each of which attached with unique ID) whose area overlaps with the query.
GetDifferentialPointCloudMap.srv
Given an area query and the IDs that the client node already has, the response is expected to contain the PCD maps (each of which attached with unique ID) that…
- overlaps with the area query
- is not possessed by the client node
Let $X_0$ be a set of PCD map ID that the client node has, $X_1$ be a set of PCD map ID that overlaps with the area query, ${\rm pcd}(id)$ be a function that returns PCD data that corresponds to ID $id$. In this case, the response would be
-
loaded_pcds: $\lbrace [id,{\rm pcd}(id)]~~id \in X_1 \backslash X_0 \rbrace$ -
ids_to_remove: $\lbrace id~~id \in X_0 \backslash X_1 \rbrace$
( $x \in A\backslash B \iff x \in A \wedge x \notin B$ )
GetSelectedPointCloudMap.srv
Given IDs query, the response is expected to contain the PCD maps (each of which attached with unique ID) specified by query. Before using this interface, the client is expected to receive the PointCloudMapCellMetaDataWithID.msg metadata to retrieve information about IDs.
Changelog for package autoware_map_msgs
1.8.0 (2025-05-21)
1.7.0 (2025-04-21)
1.6.0 (2025-04-07)
1.5.0 (2025-04-02)
- feat(autoware_msg_msgs): add scale factor remove altitude
(#121)
- add_scale_factor_remove_altitude
* add newline ---------
- Contributors: Yamato Ando
1.4.0 (2025-02-25)
- feat(MapProjectorInfo.msg): add LocalCartesian const (#118)
- fix(autoware_msgs): fix links to issues in CHANGELOG.rst files (#108)
- Contributors: Esteve Fernandez, Sebastian Zęderowski
1.3.0 (2024-11-25)
- feat(autoware_map_msgs): add MapProjectorInfo message (#102)
- Contributors: Ryohsuke Mitsudome
1.2.0 (2024-10-01)
- feat(autoware_map_msgs): add msg and srv files releated with dynamic lanelet loading (#81)
- Contributors: Barış Zeren, Ryohsuke Mitsudome, Yamato Ando
1.1.0 (2024-05-10)
- chore: update [package.xml]{.title-ref} and fix [CMakeLists.txt]{.title-ref} (#91) update package.xml and fix cmakefiles
- feat(autoware_map_msgs): support cylindrical AreaInfo
(#64)
- feat(autoware_map_msgs): support cylindrical AreaInfo
* update attribute ---------
- feat(autoware_map_msgs): add selected map loading
(#57)
- feat(map_loader): add support for sequential_map_loading
- feat(autoware_map_msgs): add PointCloudMetaData.msg
- docs(autoware_map_msgs): add description of selected_map_loading
- docs(autoware_map_msgs): remove gif for selected_map_loading
- docs(autoware_map_msgs): fix typo
- feat(autoware_map_msgs): make member of msg plural
- docs(autoware_map_msgs): clarify the client needs to receive msg beforehand
* docs(autoware_map_msgs): clarify IDs included in msgs are used as query for service ---------
- feat(autoware_map_msgs): add grid coordinates in
PointCloudMapCellWithID.msg
(#52)
- feat(autoware_map_msgs): add grid coordinates in PointCloudMapCellWithID.msg
- style(pre-commit): autofix
* debug
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(map-messages): add LaneletMapBin.msg (#30)
- feat: add autoware_map_msgs for dynamic map loading (#39) Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- Contributors: M. Fatih Cırıt, Shintaro Tomie, Yutaka Kondo, kminoda
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| rosidl_default_generators | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common | |
| geographic_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| std_msgs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| autoware_msgs | |
| autoware_lanelet2_extension |
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.8.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_msgs.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-21 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | ros ros2 autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Mete Fatih Cırıt
- Yutaka Kondo
- Ryohsuke Mitsudome
Authors
- Koji Minoda
autoware_map_msgs
AreaInfo.msg
The message represents an area information. This is intended to be used as a query for partial / differential map loading (see GetPartialPointCloudMap.srv and GetDifferentialPointCloudMap.srv section).
PointCloudMapCellWithID.msg
The message contains a pointcloud data attached with an ID.
PointCloudMapCellMetaDataWithID.msg
The message contains a pointcloud meta data attached with an ID. These IDs are intended to be used as a query for selected PCD map loading (see GetSelectedPointCloudMap.srv section).
MapProjectorInfo.msg
The message contains the information required to project global coordinates to local coordinates used by Autoware, which includes the name of the projection method and the parameters for the projection. For further information, please refer to the readme of map_projection_loader in Autoware Universe.
GetPartialPointCloudMap.srv
Given an area query (AreaInfo), the response is expected to contain the PCD maps (each of which attached with unique ID) whose area overlaps with the query.
GetDifferentialPointCloudMap.srv
Given an area query and the IDs that the client node already has, the response is expected to contain the PCD maps (each of which attached with unique ID) that…
- overlaps with the area query
- is not possessed by the client node
Let $X_0$ be a set of PCD map ID that the client node has, $X_1$ be a set of PCD map ID that overlaps with the area query, ${\rm pcd}(id)$ be a function that returns PCD data that corresponds to ID $id$. In this case, the response would be
-
loaded_pcds: $\lbrace [id,{\rm pcd}(id)]~~id \in X_1 \backslash X_0 \rbrace$ -
ids_to_remove: $\lbrace id~~id \in X_0 \backslash X_1 \rbrace$
( $x \in A\backslash B \iff x \in A \wedge x \notin B$ )
GetSelectedPointCloudMap.srv
Given IDs query, the response is expected to contain the PCD maps (each of which attached with unique ID) specified by query. Before using this interface, the client is expected to receive the PointCloudMapCellMetaDataWithID.msg metadata to retrieve information about IDs.
Changelog for package autoware_map_msgs
1.8.0 (2025-05-21)
1.7.0 (2025-04-21)
1.6.0 (2025-04-07)
1.5.0 (2025-04-02)
- feat(autoware_msg_msgs): add scale factor remove altitude
(#121)
- add_scale_factor_remove_altitude
* add newline ---------
- Contributors: Yamato Ando
1.4.0 (2025-02-25)
- feat(MapProjectorInfo.msg): add LocalCartesian const (#118)
- fix(autoware_msgs): fix links to issues in CHANGELOG.rst files (#108)
- Contributors: Esteve Fernandez, Sebastian Zęderowski
1.3.0 (2024-11-25)
- feat(autoware_map_msgs): add MapProjectorInfo message (#102)
- Contributors: Ryohsuke Mitsudome
1.2.0 (2024-10-01)
- feat(autoware_map_msgs): add msg and srv files releated with dynamic lanelet loading (#81)
- Contributors: Barış Zeren, Ryohsuke Mitsudome, Yamato Ando
1.1.0 (2024-05-10)
- chore: update [package.xml]{.title-ref} and fix [CMakeLists.txt]{.title-ref} (#91) update package.xml and fix cmakefiles
- feat(autoware_map_msgs): support cylindrical AreaInfo
(#64)
- feat(autoware_map_msgs): support cylindrical AreaInfo
* update attribute ---------
- feat(autoware_map_msgs): add selected map loading
(#57)
- feat(map_loader): add support for sequential_map_loading
- feat(autoware_map_msgs): add PointCloudMetaData.msg
- docs(autoware_map_msgs): add description of selected_map_loading
- docs(autoware_map_msgs): remove gif for selected_map_loading
- docs(autoware_map_msgs): fix typo
- feat(autoware_map_msgs): make member of msg plural
- docs(autoware_map_msgs): clarify the client needs to receive msg beforehand
* docs(autoware_map_msgs): clarify IDs included in msgs are used as query for service ---------
- feat(autoware_map_msgs): add grid coordinates in
PointCloudMapCellWithID.msg
(#52)
- feat(autoware_map_msgs): add grid coordinates in PointCloudMapCellWithID.msg
- style(pre-commit): autofix
* debug
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(map-messages): add LaneletMapBin.msg (#30)
- feat: add autoware_map_msgs for dynamic map loading (#39) Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- Contributors: M. Fatih Cırıt, Shintaro Tomie, Yutaka Kondo, kminoda
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| rosidl_default_generators | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common | |
| geographic_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| std_msgs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| autoware_msgs | |
| autoware_lanelet2_extension |
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 1.14.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | autoware src learn and recode. |
| Checkout URI | https://github.com/is-whale/autoware_learn.git |
| VCS Type | git |
| VCS Version | 1.14 |
| Last Updated | 2025-03-14 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- mitsudome-r
Authors
Changelog for package autoware_map_msgs
1.14.0 (2020-09-03)
1.13.0 (2019-12-03)
- Update package.xml files to Format 2.
- Contributors: Joshua Whitley
1.12.0 (2019-07-12)
- Adding CHANGELOG for autoware_external_msgs and autoware_map_msgs.
- Updating autoware_map_msgs version for ROS release.
- Merge branch 'fix/remove_unnecessary_depend' into 'master' Removing unused depend in autoware_map_msgs. See merge request autowarefoundation/autoware.ai/messages!4
- Removing unused depend in autoware_map_msgs.
- Merge branch 'feature/autoware_map_msgs' into 'master' Add autoware_map_msgs package See merge request autowarefoundation/autoware.ai/messages!2
- add autoware_map_msgs Signed-off-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>>
- Contributors: Abraham Cano, Geoffrey Biggs, Joshua Whitley, mitsudome-r
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| std_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
- msg/LaneAttributeRelation.msg
- msg/LaneAttributeRelationArray.msg
- msg/LaneRelation.msg
- msg/SignalArray.msg
- msg/PointArray.msg
- msg/WaypointSignalRelation.msg
- msg/LaneSignalLightRelation.msg
- msg/WaypointArray.msg
- msg/Signal.msg
- msg/WayareaArray.msg
- msg/WaypointLaneRelationArray.msg
- msg/LaneChangeRelation.msg
- msg/Wayarea.msg
- msg/Lane.msg
- msg/OppositeLaneRelationArray.msg
- msg/LaneSignalLightRelationArray.msg
- msg/OppositeLaneRelation.msg
- msg/WaypointRelation.msg
- msg/LaneRelationArray.msg
- msg/Area.msg
- msg/Waypoint.msg
- msg/Point.msg
- msg/LaneArray.msg
- msg/AreaArray.msg
- msg/LaneChangeRelationArray.msg
- msg/SignalLight.msg
- msg/SignalLightArray.msg
- msg/WaypointRelationArray.msg
- msg/WaypointLaneRelation.msg
- msg/WaypointSignalRelationArray.msg
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange

|
autoware_map_msgs package from autoware_msgs repoautoware_can_msgs autoware_config_msgs autoware_external_msgs autoware_lanelet2_msgs autoware_map_msgs autoware_msgs autoware_system_msgs tablet_socket_msgs vector_map_msgs |
Package Summary
| Tags | No category tags. |
| Version | 1.14.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autoware-ai/messages.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-03-10 |
| Dev Status | END-OF-LIFE |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- mitsudome-r
Authors
Changelog for package autoware_map_msgs
1.14.0 (2020-09-03)
1.13.0 (2019-12-03)
- Update package.xml files to Format 2.
- Contributors: Joshua Whitley
1.12.0 (2019-07-12)
- Adding CHANGELOG for autoware_external_msgs and autoware_map_msgs.
- Updating autoware_map_msgs version for ROS release.
- Merge branch 'fix/remove_unnecessary_depend' into 'master' Removing unused depend in autoware_map_msgs. See merge request autowarefoundation/autoware.ai/messages!4
- Removing unused depend in autoware_map_msgs.
- Merge branch 'feature/autoware_map_msgs' into 'master' Add autoware_map_msgs package See merge request autowarefoundation/autoware.ai/messages!2
- add autoware_map_msgs Signed-off-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>>
- Contributors: Abraham Cano, Geoffrey Biggs, Joshua Whitley, mitsudome-r
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| std_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
- msg/LaneAttributeRelation.msg
- msg/LaneAttributeRelationArray.msg
- msg/LaneRelation.msg
- msg/SignalArray.msg
- msg/PointArray.msg
- msg/WaypointSignalRelation.msg
- msg/LaneSignalLightRelation.msg
- msg/WaypointArray.msg
- msg/Signal.msg
- msg/WayareaArray.msg
- msg/WaypointLaneRelationArray.msg
- msg/LaneChangeRelation.msg
- msg/Wayarea.msg
- msg/Lane.msg
- msg/OppositeLaneRelationArray.msg
- msg/LaneSignalLightRelationArray.msg
- msg/OppositeLaneRelation.msg
- msg/WaypointRelation.msg
- msg/LaneRelationArray.msg
- msg/Area.msg
- msg/Waypoint.msg
- msg/Point.msg
- msg/LaneArray.msg
- msg/AreaArray.msg
- msg/LaneChangeRelationArray.msg
- msg/SignalLight.msg
- msg/SignalLightArray.msg
- msg/WaypointRelationArray.msg
- msg/WaypointLaneRelation.msg
- msg/WaypointSignalRelationArray.msg
Services
Plugins
Recent questions tagged autoware_map_msgs at Robotics Stack Exchange
|
|
autoware_map_msgs package from autoware_msgs repoautoware_can_msgs autoware_config_msgs autoware_external_msgs autoware_lanelet2_msgs autoware_map_msgs autoware_msgs autoware_system_msgs tablet_socket_msgs vector_map_msgs |
Package Summary
| Tags | No category tags. |
| Version | 1.14.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autoware-ai/messages.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-03-10 |
| Dev Status | END-OF-LIFE |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- mitsudome-r
Authors
Changelog for package autoware_map_msgs
1.14.0 (2020-09-03)
1.13.0 (2019-12-03)
- Update package.xml files to Format 2.
- Contributors: Joshua Whitley
1.12.0 (2019-07-12)
- Adding CHANGELOG for autoware_external_msgs and autoware_map_msgs.
- Updating autoware_map_msgs version for ROS release.
- Merge branch 'fix/remove_unnecessary_depend' into 'master' Removing unused depend in autoware_map_msgs. See merge request autowarefoundation/autoware.ai/messages!4
- Removing unused depend in autoware_map_msgs.
- Merge branch 'feature/autoware_map_msgs' into 'master' Add autoware_map_msgs package See merge request autowarefoundation/autoware.ai/messages!2
- add autoware_map_msgs Signed-off-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>>
- Contributors: Abraham Cano, Geoffrey Biggs, Joshua Whitley, mitsudome-r
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| std_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
- msg/LaneAttributeRelation.msg
- msg/LaneAttributeRelationArray.msg
- msg/LaneRelation.msg
- msg/SignalArray.msg
- msg/PointArray.msg
- msg/WaypointSignalRelation.msg
- msg/LaneSignalLightRelation.msg
- msg/WaypointArray.msg
- msg/Signal.msg
- msg/WayareaArray.msg
- msg/WaypointLaneRelationArray.msg
- msg/LaneChangeRelation.msg
- msg/Wayarea.msg
- msg/Lane.msg
- msg/OppositeLaneRelationArray.msg
- msg/LaneSignalLightRelationArray.msg
- msg/OppositeLaneRelation.msg
- msg/WaypointRelation.msg
- msg/LaneRelationArray.msg
- msg/Area.msg
- msg/Waypoint.msg
- msg/Point.msg
- msg/LaneArray.msg
- msg/AreaArray.msg
- msg/LaneChangeRelationArray.msg
- msg/SignalLight.msg
- msg/SignalLightArray.msg
- msg/WaypointRelationArray.msg
- msg/WaypointLaneRelation.msg
- msg/WaypointSignalRelationArray.msg