
Package Summary
| Tags | No category tags. |
| Version | 0.45.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-26 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | planner ros calibration self-driving-car autonomous-driving autonomous-vehicles ros2 3d-map autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
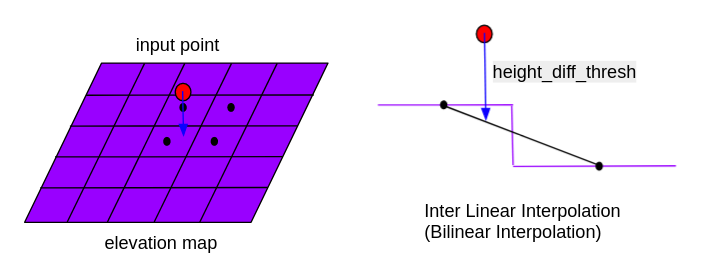
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Other Filters
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/map |
sensor_msgs::msg::PointCloud2 |
map (in case static map loading) |
/localization/kinematic_state |
nav_msgs::msg::Odometry |
current ego-vehicle pose (in case dynamic map loading) |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
use_dynamic_map_loading |
bool | map loading mode selection, true for dynamic map loading, false for static map loading, recommended for no-split map pointcloud |
true |
distance_threshold |
float | Threshold distance to compare input points with map points [m] | 0.5 |
map_update_distance_threshold |
float | Threshold of vehicle movement distance when map update is necessary (in dynamic map loading) [m] | 10.0 |
map_loader_radius |
float | Radius of map need to be loaded (in dynamic map loading) [m] | 150.0 |
timer_interval_ms |
int | Timer interval to check if the map update is necessary (in dynamic map loading) [ms] | 100 |
publish_debug_pcd |
bool | Enable to publish voxelized updated map in debug/downsampled_map/pointcloud for debugging. It might cause additional computation cost |
false |
downsize_ratio_z_axis |
double | Positive ratio to reduce voxel_leaf_size and neighbor point distance threshold in z axis | 0.5 |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_compare_map_segmentation
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: perception code owner update
(#10645)
- chore: update maintainers in multiple perception packages
* Revert "chore: update maintainers in multiple perception packages" This reverts commit f2838c33d6cd82bd032039e2a12b9cb8ba6eb584.
- chore: update maintainers in multiple perception packages
* chore: add Kok Seang Tan as maintainer in multiple perception packages ---------
- chore(elevation_map): add \@asa-naki to maitainer (#10621)
- fix(autoware_compare_map_segmentation): handle empty output point
cloud
(#10572)
- fix(voxel_based_compare_map_filter): handle empty output point cloud and set appropriate frame_id
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- Contributors: Kosuke Takeuchi, Taekjin LEE, TaikiYamada4
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
- Merge remote-tracking branch 'origin/main' into humble
- feat(compare_map_segmentation): publish warning when
pcl::voxelgrid failed to filter with large leaf size
(#10381)
* feat: add warn in pcl overflow with compare_map chore: fix
message length feat: add sanity check into voxel based compare map
feat: add feasibility check function
- fix: update include paths for voxel_grid_map_loader in segmentation filters
- feat: add diagnostic status handling in VoxelGridMapLoader and related components
- feat: add diagnostic updater for voxel-based compare map filter and improve status reporting
- refactor: move isFeasibleWithPCLVoxelGrid function to VoxelGridMapLoader and streamline diagnostics handling
- feat: update diagnostic status handling in VoxelGridMapLoader and related components
- feat: enhance diagnostic status handling in voxel-based compare map filters
- style(pre-commit): autofix
- refactor: add comments for clarity on voxel number calculations and overflow checks
* Update perception/autoware_compare_map_segmentation/lib/voxel_grid_map_loader.cpp Co-authored-by: badai nguyen <<94814556+badai-nguyen@users.noreply.github.com>> * style(pre-commit): autofix ---------Co-authored-by: yoshiri <<yoshiyoshidetteiu@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: badai nguyen <<94814556+badai-nguyen@users.noreply.github.com>>
- fix(autoware_compare_map_segmentation): missing includes (#10413) fix: missing include
- fix(compare_map_segmentation): last map update logic (#10351) fix(compare_map): logic
- fix(voxel_based_compare_map): temporary fix pointcloud transform
lookup
(#10299)
- fix(voxel_based_compare_map): temporary fix pointcloud transform lookup_time
- pre-commit
- chore: reduce timeout
- fix: misalignment when tranform back output
* fix: typo ---------
- Contributors: Kenzo Lobos Tsunekawa, Ryohsuke Mitsudome, Shumpei Wakabayashi, Taekjin LEE, badai nguyen
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- fix(compare_map_filter): deadlock bug fix
(#10222)
- fix(compare_map_filter): deadlock bug fix
- fix: change to lock_guard
- fix: CI error
- reduce scope of mutex
- refactor
- chore: refactor
* fix: add missing mutex for map_grid_size_x ---------
- Contributors: Hayato Mizushima, Yutaka Kondo, badai nguyen
0.42.0 (2025-03-03)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
- Contributors: Fumiya Watanabe, 心刚
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- feat(autoware_compare_map_segmentation): tier4_debug_msgs changed to autoware_internal_debug_msgs in fil… (#9869) feat: tier4_debug_msgs changed to autoware_internal_debug_msgs in files perception/autoware_compare_map_segmentation Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
- Contributors: Fumiya Watanabe, Vishal Chauhan
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- fix: fix ticket links in CHANGELOG.rst (#9588)
- chore(package.xml): bump version to 0.39.0
(#9587)
- chore(package.xml): bump version to 0.39.0
- fix: fix ticket links in CHANGELOG.rst
* fix: remove unnecessary diff ---------Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>>
- fix: fix ticket links in CHANGELOG.rst (#9588)
- chore(compare_map_segmentation): rename defined type (#9181)
- fix(cpplint): include what you use - perception (#9569)
- 0.39.0
- update changelog
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(compare_map_segmentation): add maintainer (#9371)
- fix(compare_map_segmentation): timer period mismatched with parameter (#9259)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- fix(autoware_compare_map_segmentation): fix cppcheck constVariableReference (#9196)
- Contributors: Esteve Fernandez, Fumiya Watanabe, M. Fatih Cırıt, Ryohsuke Mitsudome, Ryuta Kambe, Yutaka Kondo, badai nguyen
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- fix(autoware_compare_map_segmentation): fix cppcheck constVariableReference (#9196)
- Contributors: Esteve Fernandez, Ryuta Kambe, Yutaka Kondo
0.38.0 (2024-11-08)
- unify package.xml version to 0.37.0
- refactor(autoware_point_types): prefix namespace with autoware::point_types (#9169)
- refactor(autoware_compare_map_segmentation): resolve clang-tidy
error in autoware_compare_map_segmentation
(#9162)
- refactor(autoware_compare_map_segmentation): resolve clang-tidy error in autoware_compare_map_segmentation
- style(pre-commit): autofix
- include message_filters as SYSTEM
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(compare_map_segmentation): add missing mutex lock
(#9097)
- fix(compare_map_segmentation): missing mutux
- chore: rename mutex_
- fix: remove unnecessary mutex
- fix: typos
- chore: minimize mutex scope
- chore: change to lock_guard
- fix: check tree initialization
- fix: memory ordering
* fix: replace all static_map_loader_mutex_ ---------
- fix(compare_map_segmentation): throw runtime error when using
non-split map pointcloud for DynamicMapLoader
(#9024)
- fix(compare_map_segmentation): throw runtime error when using non-split map pointcloud for DynamicMapLoader
- chore: typo
- fix: launch
* Update perception/autoware_compare_map_segmentation/schema/voxel_distance_based_compare_map_filter.schema.json Co-authored-by: Yoshi Ri <<yoshiyoshidetteiu@gmail.com>> * fix: change to RCLCPP_ERROR ---------Co-authored-by: Yoshi Ri <<yoshiyoshidetteiu@gmail.com>>
- chore(compare_map_segmentation): add node tests
(#8907)
- chore(compare_map_segmentation): add test for voxel_based_compare_map_filter
- feat: add test for other compare map filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_compare_map_segmentation): typo bug fix (#8939) fix(compare_map_filter): typo bug fix
- fix(autoware_compare_map_segmentation): fix unusedFunction (#8725) fix:unusedFunction
- fix(compare_map_segmentation): use squared distance to compare threshold (#8744) fix: use square distance to compare threshold
- fix(autoware_compare_map_segmentation): fix unusedFunction (#8565) fix:unusedFunction
- fix(autoware_compare_map_segmentation): fix cppcheck warnings of
functionStatic
(#8263)
- fix: deal with functionStatic warnings
- fix: deal with functionStatic warnings
- fix: remove unnecessary const
* fix: build error ---------
- fix(autoware_compare_map_segmentation): fix uninitMemberVar (#8338) fix:uninitMemberVar
- fix(autoware_compare_map_segmentation): fix passedByValue (#8233) fix:passedByValue
- fix(autoware_compare_map_segmentation): fix redundantInitialization warning (#8226)
- revert: revert "refactor(autoware_map_msgs): modify pcd metadata msg (#7852)" (#8180)
- refactor(autoware_map_msgs): modify pcd metadata msg (#7852)
- refactor(compare_map_segmentation): add package name prefix of
autoware_
(#8005)
- refactor(compare_map_segmentation): add package name prefix of autoware_
* docs: update Readme ---------
- Contributors: Esteve Fernandez, Ryohsuke Mitsudome, Ryuta Kambe, Yamato Ando, Yoshi Ri, Yukinari Hisaki, Yutaka Kondo, badai nguyen, kobayu858, taisa1
0.26.0 (2024-04-03)
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]