
Package Summary
| Tags | No category tags. |
| Version | 0.45.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-26 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | planner ros calibration self-driving-car autonomous-driving autonomous-vehicles ros2 3d-map autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Yukihiro Saito
Authors
tier4_vehicle_rviz_plugin
This package is including jsk code.
Note that jsk_overlay_utils.cpp and jsk_overlay_utils.hpp are BSD license.
Purpose
This plugin provides a visual and easy-to-understand display of vehicle speed, turn signal, steering status and acceleration.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
The topic is vehicle twist |
/control/turn_signal_cmd |
autoware_vehicle_msgs::msg::TurnIndicatorsReport |
The topic is status of turn signal |
/vehicle/status/steering_status |
autoware_vehicle_msgs::msg::SteeringReport |
The topic is status of steering |
/localization/acceleration |
geometry_msgs::msg::AccelWithCovarianceStamped |
The topic is the acceleration |
Parameter
Core Parameters
ConsoleMeter
| Name | Type | Default Value | Description |
|---|---|---|---|
property_text_color_ |
QColor | QColor(25, 255, 240) | Text color |
property_left_ |
int | 128 | Left of the plotter window [px] |
property_top_ |
int | 128 | Top of the plotter window [px] |
property_length_ |
int | 256 | Height of the plotter window [px] |
property_value_height_offset_ |
int | 0 | Height offset of the plotter window [px] |
property_value_scale_ |
float | 1.0 / 6.667 | Value scale |
SteeringAngle
| Name | Type | Default Value | Description |
|---|---|---|---|
property_text_color_ |
QColor | QColor(25, 255, 240) | Text color |
property_left_ |
int | 128 | Left of the plotter window [px] |
property_top_ |
int | 128 | Top of the plotter window [px] |
property_length_ |
int | 256 | Height of the plotter window [px] |
property_value_height_offset_ |
int | 0 | Height offset of the plotter window [px] |
property_value_scale_ |
float | 1.0 / 6.667 | Value scale |
property_handle_angle_scale_ |
float | 3.0 | Scale is steering angle to handle angle |
TurnSignal
| Name | Type | Default Value | Description |
|---|---|---|---|
property_left_ |
int | 128 | Left of the plotter window [px] |
property_top_ |
int | 128 | Top of the plotter window [px] |
property_width_ |
int | 256 | Left of the plotter window [px] |
property_height_ |
int | 256 | Width of the plotter window [px] |
VelocityHistory
| Name | Type | Default Value | Description |
|---|---|---|---|
property_velocity_timeout_ |
float | 10.0 | Timeout of velocity [s] |
property_velocity_alpha_ |
float | 1.0 | Alpha of velocity |
property_velocity_scale_ |
float | 0.3 | Scale of velocity |
property_velocity_color_view_ |
bool | false | Use Constant Color or not |
property_velocity_color_ |
QColor | Qt::black | Color of velocity history |
property_vel_max_ |
float | 3.0 | Color Border Vel Max [m/s] |
AccelerationMeter
| Name | Type | Default Value | Description |
|---|---|---|---|
property_normal_text_color_ |
QColor | QColor(25, 255, 240) | Normal text color |
property_emergency_text_color_ |
QColor | QColor(255, 80, 80) | Emergency acceleration color |
property_left_ |
int | 896 | Left of the plotter window [px] |
property_top_ |
int | 128 | Top of the plotter window [px] |
property_length_ |
int | 256 | Height of the plotter window [px] |
property_value_height_offset_ |
int | 0 | Height offset of the plotter window [px] |
property_value_scale_ |
float | 1 / 6.667 | Value text scale |
property_emergency_threshold_max_ |
float | 1.0 | Max acceleration threshold for emergency [m/s^2] |
property_emergency_threshold_min_ |
float | -2.5 | Min acceleration threshold for emergency [m/s^2] |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select any one of the tier4_vehicle_rviz_plugin and press OK.
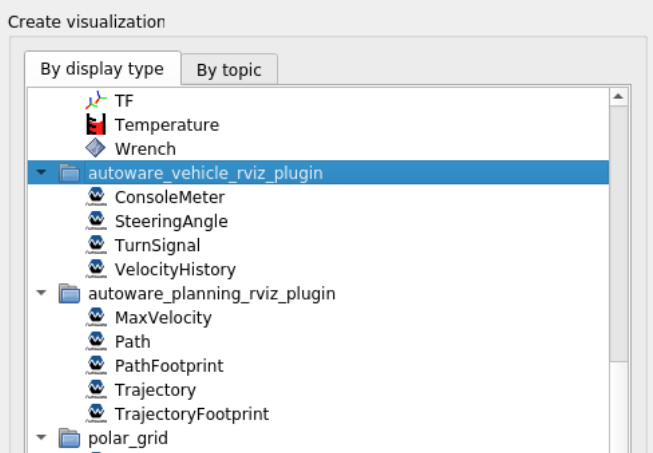
- Enter the name of the topic where you want to view the status.

Changelog for package tier4_vehicle_rviz_plugin
0.45.0 (2025-05-22)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
- Contributors: Fumiya Watanabe, 心刚
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- fix: missing dependency in common components (#9072)
- Contributors: Esteve Fernandez, Yutaka Kondo, ぐるぐる
0.38.0 (2024-11-08)
- unify package.xml version to 0.37.0
- fix(tier4_vehicle_rviz_plugin): fix cppcheck warning of virtualCallInConstructor (#8379) fix: deal with virtualCallInConstructor warning Co-authored-by: Ryuta Kambe <<ryuta.kambe@tier4.jp>>
- fix: replace Ogre deprecated header (#7606) Fix Ogre deprecated header Co-authored-by: Kotaro Yoshimoto <<pythagora.yoshimoto@gmail.com>>
- refactor(universe_utils/motion_utils)!: add autoware namespace (#7594)
- feat(autoware_universe_utils)!: rename from tier4_autoware_utils (#7538) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>>
- feat!: replace autoware_auto_msgs with autoware_msgs for common modules (#7239) Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>>
- Contributors: Kosuke Takeuchi, Ryohsuke Mitsudome, Takayuki Murooka, Yutaka Kondo, taisa1, ぐるぐる
0.26.0 (2024-04-03)
- refactor(common): extern template for motion_utils / remove tier4_autoware_utils.hpp / remove motion_utis.hpp (#5027)
- chore(build): remove tier4_autoware_utils.hpp in common/ (#4828) removed tier4_autoware_utils.hpp in common/
- chore: do not display steer and velocity value when message is not
subscribed yet
(#4739)
- chore: do not display steer and velocity value when message is not subscribed yet
* chore: change msgs ---------
- feat(tier4_vehicle_rviz_plugin): add acceleration visualization
plugin to RViz
(#4506)
- feat: add acceleration visualization plugin to RVIZ
- feat: add RVIZ plugin for acceleration; remove limit text; debugging: property_label_scale_ not responding
- style(pre-commit): autofix
- fix typo in acceleration
- fix a bug in keeping using abs(accel) to compute meter angle; delete text of acceleration meter, and delte the parameter of property_label_value
- feat: separate the setting of max/min emergency threshold; update max/min acceration; set threshold for reconfiguring emergency speed
* style(pre-commit): autofix ---------Co-authored-by: Owen-Liuyuxuan <<uken.ryu@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- build: mark autoware_cmake as <buildtool_depend>
(#3616)
* build: mark autoware_cmake as <buildtool_depend> with
<build_depend>, autoware_cmake is automatically exported with
ament_target_dependencies() (unecessary)
- style(pre-commit): autofix
* chore: fix pre-commit errors ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- chore: sync files
(#3227)
- chore: sync files
* style(pre-commit): autofix ---------Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(tier4_planning/vehicle_rviz_plugin): fixed license
(#2059)
- fix(tier4_planning/vehicle_rviz_plugin): fixed license
- fix build error
- fix: remove unused check of rviz plugin version (#1474)
- fix(tier4_vehicle_rviz_plugin): initialization vehicle rivz
plugin
(#1379)
- fix(tier4_vehicle_rviz_plugin): initialization vehicle rviz plugin
- initialize signal_type
- feat(rviz_plugin): console meter is too large on the Rviz with FHD
display, isn't it?
(#587)
- feat(tier4_planning/vehicle_plugin): make plugins size scalable
- remove space
- scaling
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- refactor: simplify Rolling support (#854)
- refactor: use autoware cmake
(#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- fix: suppress compiler warnings (#852)
- style: fix format of package.xml (#844)
- fix(tier4_autoware_utils): modify build error in rolling
(#720)
- fix(tier4_autoware_utils): modify build error in rolling
- fix(lanelet2_extension): add target compile definition for geometry2
- fix(ekf_localizer): add target compile definition for geometry2
- fix(freespace_planning_algorithms): add target compile definition for geometry2
- fix(interpolation): add target compile definition for geometry2
- fix(freespace_planner): add target compile definition for geometry2
- fix(lane_departure_checker): add target compile definition for geometry2
- fix(map_based_prediction): add target compile definition for geometry2
- fix(ground_segmentation): add target compile definition for geometry2
- fix(motion_velocity_smoother): add target compile definition for geometry2
- fix(multi_object_tracker): add target compile definition for geometry2
- fix(trajectory_follower): add target compile definition for geometry2
- fix(control_performance_analysis): add target compile definition for geometry2
- fix(detected_object_validation): add target compile definition for geometry2
- fix(goal_distance_calculator): add target compile definition for geometry2
- fix(ndt_scan_matcher): add target compile definition for geometry2
- fix(route_handler): add target compile definition for geometry2
- fix(behavior_path_planner): add target compile definition for geometry2
- fix(mission_planner): add target compile definition for geometry2
- fix(obstacle_avoidance_planner): add target compile definition for geometry2
- fix(obstacle_stop_planner): add target compile definition for geometry2
- fix(obstacle_collision_checker): add target compile definition for geometry2
- fix(shape_estimation): add target compile definition for geometry2
- fix(behavior_velocity_planner): add target compile definition for geometry2
- fix(path_distance_calculator): add target compile definition for geometry2
- fix(detection_by_tracker): add target compile definition for geometry2
- fix(surround_obstacle_checker): add target compile definition for geometry2
- fix(probabilistic_occupancy_grid_map): add target compile definition for geometry2
- fix(tier4_debug_tools): add target compile definition for geometry2
- fix(tier4_vehicle_rviz_plugin): add target compile definition for geometry2
- fix(pure_pursuit): add target compile definition for geometry2
- fix(trajectory_follower_nodes): add target compile definition for geometry2
- fix(occupancy_grid_map_outlier_filter): add target compile definition for geometry2
- fix(traffic_light_map_based_detector): add target compile definition for geometry2
- fix(planning_error_monitor): add target compile definition for geometry2
- fix(planning_evaluator): add target compile definition for geometry2
- fix(lidar_centerpoint): add target compile definition for geometry2
- feat: rename existing packages name starting with autoware to
different names
(#180)
- autoware_api_utils -> tier4_api_utils
- autoware_debug_tools -> tier4_debug_tools
- autoware_error_monitor -> system_error_monitor
- autoware_utils -> tier4_autoware_utils
- autoware_global_parameter_loader -> global_parameter_loader
- autoware_iv_auto_msgs_converter -> tier4_auto_msgs_converter
- autoware_joy_controller -> joy_controller
- autoware_error_monitor -> system_error_monitor(launch)
- autoware_state_monitor -> ad_service_state_monitor
- autoware_web_controller -> web_controller
- remove autoware_version
- remove autoware_rosbag_recorder
- autoware__rviz_plugin -> tier4__rviz_plugin
- fix ad_service_state_monitor
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- Contributors: Daisuke Nishimatsu, Kenji Miyake, Mamoru Sobue, Takagi, Isamu, Takamasa Horibe, Takayuki Murooka, Takeshi Miura, Tomoya Kimura, Vincent Richard, Yuxuan Liu, awf-autoware-bot[bot]
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| ament_index_cpp | |
| autoware_utils | |
| autoware_vehicle_msgs | |
| rviz_common | |
| rviz_default_plugins | |
| rviz_ogre_vendor |