
Package Summary
| Tags | No category tags. |
| Version | 0.45.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-26 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | planner ros calibration self-driving-car autonomous-driving autonomous-vehicles ros2 3d-map autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
Authors
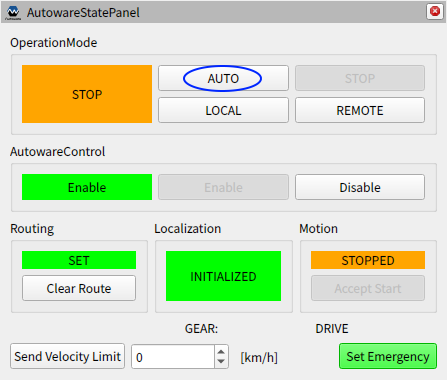
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_default |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.

-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.

-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.45.0 (2025-05-22)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- fix: missing dependency in common components (#9072)
- Contributors: Esteve Fernandez, Yutaka Kondo, ぐるぐる
0.38.0 (2024-11-08)
- unify package.xml version to 0.37.0
- fix(tier4_state_rviz_plugin): fix unmatchedSuppression (#8921) fix:unmatchedSuppression
- style: update state panel plugin (#8846)
- fix(tier4_state_rviz_plugin): fix unusedFunction (#8841) fix:unusedFunction
- fix(tier4_state_rviz_plugin): fix unusedFunction
(#8845)
- fix:unusedFunction
- fix:unusedFunction
* fix:revert ---------
- fix(tier4_state_rviz_plugin): fix constVariablePointer (#8832) fix:constVariablePointer
- fix(tier4_state_rviz_plugin): fix shadowVariable
(#8831)
- fix:shadowVariable
* fix:clang-format ---------
- refactor(custom_button): improve drop shadow effect (#8781)
- fix(tier4_state_rviz_plugin): fix unmatchedSuppression (#8658) fix:unmatchedSuppression
- fix(tier4_state_rviz_plugin): fix unusedFunction
(#8608)
- fix:unusedFunction
- fix:clang format
- fix:revert custom button
- fix:revert custom container
- fix:revert custom icon label
- fix:revert custom label
- fix:revert custom segment button
- fix:revert custom slider
- fix:revert custom toggle switch
- fix:revert custom label
- fix:add blank line
- fix:revert custom botton item
* fix:remove declaration ---------
- feat(tier4_adapi_rviz_plugin, tier4_state_rviz_plugin): set timestamp to velocity_limit msg from rviz panels (#8548) set timestamp to velocity_limit msg
- feat!: replace autoware_auto_msgs with autoware_msgs for common modules (#7239) Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>>
- feat: update autoware state panel (#7036)
- Contributors: Autumn60, Khalil Selyan, Ryohsuke Mitsudome, Yutaka Kondo, kobayu858
0.26.0 (2024-04-03)
- feat: add pull over to autoware_state_panel of rviz (#6540)
- chore: set log level of debug printing in rviz plugin to DEBUG (#5996)
- feat!: remove planning factor type (#5793) remove planning factor type Co-authored-by: Hiroki OTA <<hiroki.ota@tier4.jp>>
- feat: change planning factor behavior constants
(#5590)
- replace module type
* support compatibility ---------Co-authored-by: Hiroki OTA <<hiroki.ota@tier4.jp>>
- feat(tier4_state_rviz_plugin): add init by gnss button (#4392)
- fix(tier4_state_rviz_plugin): add NEUTRAL on GEAR (#3132) fix(tier4_state_rviz_plugin): fix bug https://github.com/autowarefoundation/autoware_universe/issues/3121
- refactor(start_planner): rename pull out to start planner (#3908)
- build(iron): remove rmw_qos_profile_t (#3809)
- fix(rviz_plugin): fx traffic light and velocity factor rviz plugin (#3598) fix(rviz_plugin); fx traffic light and velocity factor rviz plugin
- build: mark autoware_cmake as <buildtool_depend>
(#3616)
* build: mark autoware_cmake as <buildtool_depend> with
<build_depend>, autoware_cmake is automatically exported with
ament_target_dependencies() (unecessary)
- style(pre-commit): autofix
* chore: fix pre-commit errors ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- refactor(behavior_path_planner): rename pull_over to goal_planner (#3501)
- chore: sync files
(#3227)
- chore: sync files
* style(pre-commit): autofix ---------Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_state_panel): change variable for fail safe behavior (#2952) fix fail safe behavior value
- fix(tier4_state_rviz_plugin): fix typo (#2988)
- fix(tier4_state_rviz_plugin): split into two panels
(#2914)
- fix(tier4_state_rviz_plugin): split into two panels
- feat: add image
- style(pre-commit): autofix
* Update common/tier4_state_rviz_plugin/src/velocity_steering_factors_panel.cpp Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>> * Update common/tier4_state_rviz_plugin/src/velocity_steering_factors_panel.hpp Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- Update autoware_state_panel.hpp
- Update autoware_state_panel.cpp
- Update common/tier4_state_rviz_plugin/src/velocity_steering_factors_panel.cpp
* Update common/tier4_state_rviz_plugin/src/velocity_steering_factors_panel.hpp ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- feat(tier4_state_rviz_plugin): add planning API visualization (#2632) feat(tier4_state_rviz_plugin): add Planning Visualization Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>>
- feat(tier4_state_rviz_plugin): add Fail Safe Visualization
(#2626)
- feat(tier4_state_rviz_plugin): add information for Fail Safe
- fix color
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- docs(tier4_state_rviz_plugin): update readme (#2475)
- feat(tier4_state_rviz_plugin): add API monitoring for Routing,
Localization and Motion
(#2436)
- feat: add viz for routing API
- feat: add motion and localiation
- some refactoring
- add comment
- add vertical align
- fix: in transition
- fix: setupLabel -> updateLabel
- add memory
- fix pre commit
* ci(pre-commit): autofix Co-authored-by: Takagi, Isamu <<isamu.takagi@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(tier4_state_rviz_plugin): use ADAPI v1 instead of old API
(#2433)
- fix: delete path change approval
- make operation and control mode layout
- add nullptr
- fix pre-commit
- fix comment
- fix: rename enable disable
- feat: add TRANSITION
- fix comment
- delete unused
- chore(tier4_state_rviz_plugin): add maintainer (#2435)
- revert(tier4_state_rviz_plugin): readability-identifier-naming (#1595) (#1617) revert(tier4_state_rviz_plugin): readability-identifier-naming (#1595)" This reverts commit 57720204fd401a59b5dffd12d5b8958e5ae2a5af.
- refactor(tier4_state_rviz_plugin): apply clang-tidy for
readability-identifier-naming
(#1595)
- refactor(tier4_state_rviz_plugin): apply clang-tidy for readability-identifier-naming
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- refactor(tier4_state_rviz_plugin): apply clang-tidy
(#1589)
- fix: clang-tidy for tier4_state_rviz_plugin
- ci(pre-commit): autofix
* Update common/tier4_state_rviz_plugin/src/autoware_state_panel.cpp Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> * Update common/tier4_state_rviz_plugin/src/autoware_state_panel.cpp Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- ci(pre-commit): autofix
* Update common/tier4_state_rviz_plugin/src/autoware_state_panel.hpp Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- fix: delete NOLINT
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- fix: remove unused check of rviz plugin version (#1474)
- fix(tier4_state_rviz_plugin): qos (#1085)
- feat(tier4_state_rviz_plugin): add emergency button
(#1048)
- feat(tier4_state_rviz_plugin):add emergency button
- ci(pre-commit): autofix
* chore: add default button name Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
-
revert: engage button action in autoware_state_panel (#1079) * Revert "fix(autoware_state_panel): fix message type for /api/autoware/get/engage (#666)" This reverts commit 49cc906418b15994b7facb881f3c133a9d8eb3a1. * Revert "fix(tier4_state_rviz_plugin): change service and topic name for engage (#633)" This reverts commit 15f43bc7063809d38c369e405a82d9666826c052.
- feat(state_rviz_plugin): add GateMode and PathChangeApproval
Button
(#894)
- feat(state_rviz_plugin): add GateMode and PathChangeApproval Button
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(rviz_plugins): add velocity limit to autoware state panel
(#879)
- feat(rviz_plugins): add velocity limit to autoware state panel
- chore(rviz_plugin): change ms to kmh
- chore: upgrade cmake_minimum_required to 3.14 (#856)
- refactor: use autoware cmake
(#849)
- remove autoware_auto_cmake
- add build_depend of autoware_cmake
- use autoware_cmake in CMakeLists.txt
- fix bugs
- fix cmake lint errors
- style: fix format of package.xml (#844)
- fix(autoware_state_panel): fix message type for
/api/autoware/get/engage
(#666)
- fix(autoware_state_panel): fix message type for /api/autoware/get/engage
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- chore: sync files
(#629)
- chore: sync files
* ci(pre-commit): autofix Co-authored-by: kenji-miyake <<kenji-miyake@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(tier4_state_rviz_plugin): change service and topic name for engage (#633)
- feat: add selector mode and disengage function (#781) (#194) Co-authored-by: Hiroki OTA <<hiroki.ota@tier4.jp>> Co-authored-by: Tomoya Kimura <<tomoya.kimura@tier4.jp>>
- feat: rename existing packages name starting with autoware to
different names
(#180)
- autoware_api_utils -> tier4_api_utils
- autoware_debug_tools -> tier4_debug_tools
- autoware_error_monitor -> system_error_monitor
- autoware_utils -> tier4_autoware_utils
- autoware_global_parameter_loader -> global_parameter_loader
- autoware_iv_auto_msgs_converter -> tier4_auto_msgs_converter
- autoware_joy_controller -> joy_controller
- autoware_error_monitor -> system_error_monitor(launch)
- autoware_state_monitor -> ad_service_state_monitor
- autoware_web_controller -> web_controller
- remove autoware_version
- remove autoware_rosbag_recorder
- autoware__rviz_plugin -> tier4__rviz_plugin
- fix ad_service_state_monitor
* ci(pre-commit): autofix Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- Contributors: Daisuke Nishimatsu, Fumiya Watanabe, Hiroki OTA, Kenji Miyake, Kosuke Takeuchi, Mark Jin, Satoshi OTA, Shumpei Wakabayashi, Takagi, Isamu, Takayuki Murooka, TetsuKawa, Tomoya Kimura, Vincent Richard, awf-autoware-bot[bot], taikitanaka3, yabuta