
Package Summary
| Tags | No category tags. |
| Version | 0.45.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-05-26 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | planner ros calibration self-driving-car autonomous-driving autonomous-vehicles ros2 3d-map autoware |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Yukihiro Saito
- Yoshi Ri
- Taekjin Lee
- Lei Gu
Authors
multi_object_tracker
Purpose
The results of the detection are processed by a time series. The main purpose is to give ID and estimate velocity.
Inner-workings / Algorithms
This multi object tracker consists of data association and EKF.
![]()
Data association
The data association performs maximum score matching, called min cost max flow problem. In this package, mussp[1] is used as solver. In addition, when associating observations to tracers, data association have gates such as the area of the object from the BEV, Mahalanobis distance, and maximum distance, depending on the class label.
EKF Tracker
Models for pedestrians, bicycles (motorcycles), cars and unknown are available. The pedestrian or bicycle tracker is running at the same time as the respective EKF model in order to enable the transition between pedestrian and bicycle tracking. For big vehicles such as trucks and buses, we have separate models for passenger cars and large vehicles because they are difficult to distinguish from passenger cars and are not stable. Therefore, separate models are prepared for passenger cars and big vehicles, and these models are run at the same time as the respective EKF models to ensure stability.
Inputs / Outputs
Input
Multiple inputs are pre-defined in the input channel parameters (described below) and the inputs can be configured
| Name | Type | Description |
|---|---|---|
selected_input_channels |
std::vector<std::string> |
array of channel names |
- default value:
selected_input_channels:="['detected_objects']", merged DetectedObject message - multi-input example:
selected_input_channels:="['lidar_centerpoint','camera_lidar_fusion','detection_by_tracker','radar_far']"
Output
| Name | Type | Description |
|---|---|---|
~/output |
autoware_perception_msgs::msg::TrackedObjects |
tracked objects |
Parameters
Input Channel parameters
{{ json_to_markdown(“perception/autoware_multi_object_tracker/schema/input_channels.schema.json”) }}
Core Parameters
- Node
{{ json_to_markdown(“perception/autoware_multi_object_tracker/schema/multi_object_tracker_node.schema.json”) }}
- Association
{{ json_to_markdown(“perception/autoware_multi_object_tracker/schema/data_association_matrix.schema.json”) }}
Simulation parameters
{{ json_to_markdown(“perception/autoware_multi_object_tracker/schema/simulation_tracker.schema.json”) }}
Assumptions / Known limits
See the model explanations.
(Optional) Error detection and handling
(Optional) Performance characterization
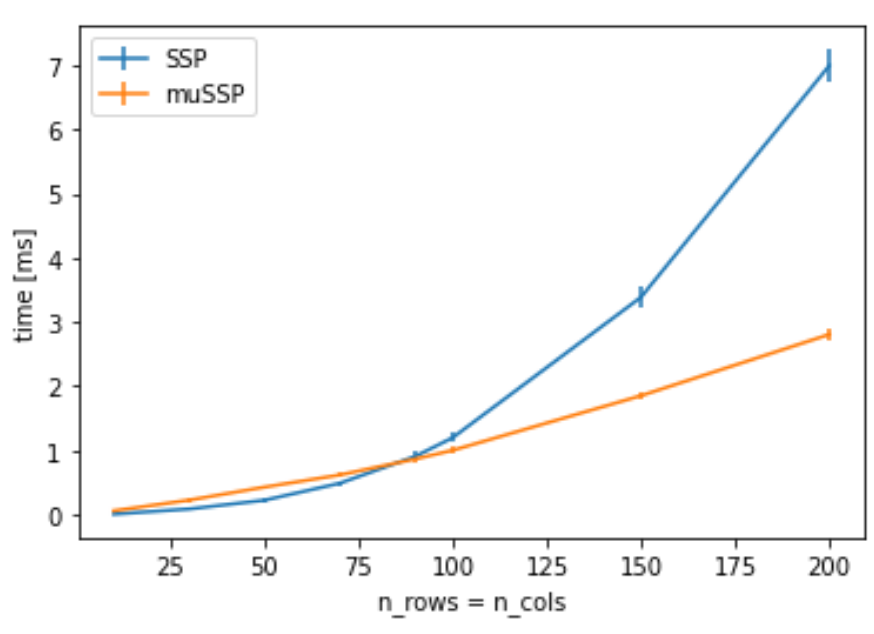
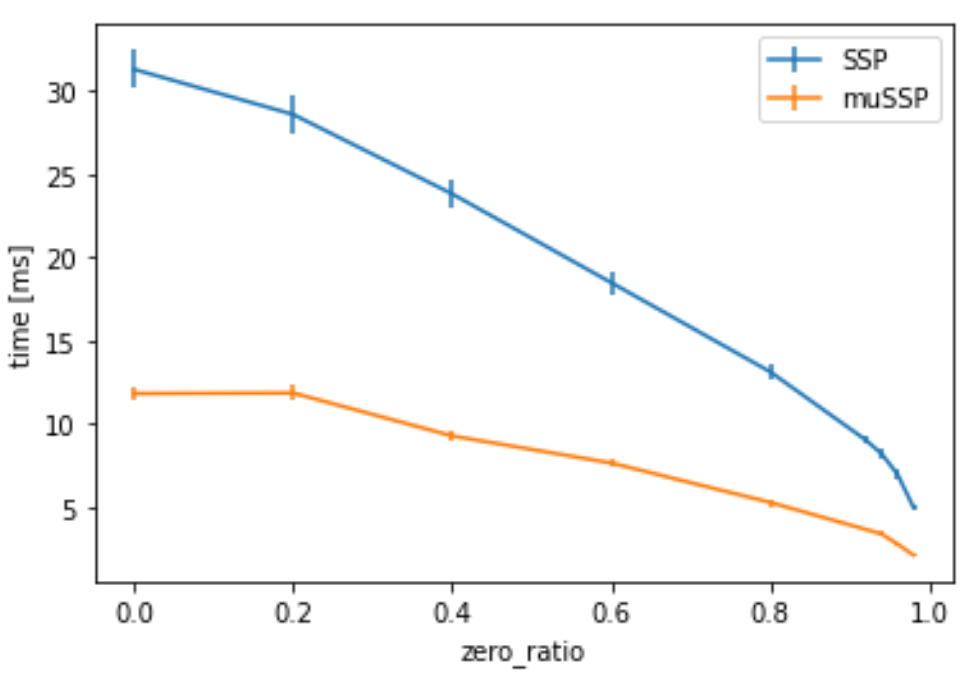
Evaluation of muSSP
According to our evaluation, muSSP is faster than normal SSP when the matrix size is more than 100.
Execution time for varying matrix size at 95% sparsity. In real data, the sparsity was often around 95%.
Execution time for varying the sparsity with matrix size 100.
(Optional) References/External links
This package makes use of external code.
| Name | License | Original Repository |
|---|---|---|
| muSSP | Apache-2.0 | https://github.com/yu-lab-vt/muSSP |
[1] C. Wang, Y. Wang, Y. Wang, C.-t. Wu, and G. Yu, “muSSP: Efficient Min-cost Flow Algorithm for Multi-object Tracking,” NeurIPS, 2019
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_multi_object_tracker
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: perception code owner update
(#10645)
- chore: update maintainers in multiple perception packages
* Revert "chore: update maintainers in multiple perception packages" This reverts commit f2838c33d6cd82bd032039e2a12b9cb8ba6eb584.
- chore: update maintainers in multiple perception packages
* chore: add Kok Seang Tan as maintainer in multiple perception packages ---------
- feat(autoware_multi_object_tracker): tracker confidence check by
its uncertainty
(#10378)
- preparation
- feat(autoware_multi_object_tracker): enhance matrix initialization and add debug logging for tracker removal
- feat(autoware_multi_object_tracker): integrate max distance matrix for tracker removal logic
* refactor(autoware_multi_object_tracker): remove debug logging for tracker removal process style(pre-commit): autofix
- refactor(autoware_multi_object_tracker): remove unused string include in association.cpp
- refactor(autoware_multi_object_tracker): remove commented debug logging in association.cpp
- refactor(autoware_multi_object_tracker): remove distance_threshold parameter and update related configurations
- refactor(tracker): implement isConfidentTracker method for object confidence assessment
- refactor(tracker): rename isConfidentTracker to isConfident and add isExpired method for object status management
- refactor(tracker): enhance updateWithoutMeasurement and isExpired methods for improved object status management
- refactor(tracker): adjust confidence and expiration thresholds for improved tracking accuracy
- refactor(tracker): add position covariance methods and improve confidence assessment logic
- refactor(tracker): add total existence probability calculation and improve debug output
- refactor(tracker): enhance debug output for expiration checks and adjust minor axis threshold
* refactor(tracker): simplify overlap removal logic by introducing canRemoveOverlappedTarget method refactor(tracker): improve code readability by formatting and enhancing overlap removal logic refactor(tracker): enhance UUID handling and improve confidence checks in tracker logic refactor(tracker): improve debug output for confidence and expiration checks
- refactor(tracker): optimize overlap removal by using list iteration instead of sorting
- refactor(tracker): simplify existence probability retrieval and enhance code clarity
- refactor(debugger): streamline existence probability retrieval in TrackerObjectDebugger
- feat(tracker): add time parameter to position covariance and confidence checks
* refactor(tracker): enhance confidence checks by refining covariance thresholds and improving debug output style(pre-commit): autofix refactor(tracker): comment out debug messages in confidence and expiration checks for cleaner output refactor(processor): simplify object retrieval in removeOverlappedTracker method
- refactor(tracker): remove redundant debug messages and enhance expiration checks with constants
- fix: set default value if the given existence probability is almost zero
- feat: merge overlapped trackers probability
- refactor(tracker): improve existence probability updates and add debug output for probability vectors
- style(pre-commit): autofix
- refactor(tracker): rename updateExistenceProbabilities to mergeExistenceProbabilities and simplify logic
- refactor(tracker): remove debug output from mergeOverlappedTracker function
- refactor(tracker): remove debug output for existence probabilities in mergeOverlappedTracker function
- refactor(tracker): include string header and simplify UUID string retrieval
- refactor(tracker): rename normalize parameter to clamp and update related logic
- refactor(tracker): rename EXPIRED_CONFIDENCE_THRESHOLD to EXPIRED_PROBABILITY_THRESHOLD for clarity
- refactor(tracker): add comment to clarify target removal condition in canMergeOverlappedTarget function
- style(pre-commit): autofix
- refactor(tracker): add validation checks for covariance matrix in getPositionCovarianceEigenSq and getPositionCovarianceSizeSq functions
- refactor(tracker): improve covariance validation logging in getPositionCovarianceEigenSq and getPositionCovarianceSizeSq functions
- refactor(tracker): optimize iterator handling in mergeOverlappedTracker function
- refactor(types): change default_existence_probability type from double to float
- refactor(tracker): rename getPositionCovarianceSizeSq to getPositionCovarianceDeterminant for clarity
- refactor(tracker): update covariance thresholds to mitigate drawbacks
* refactor(tracker): adjust covariance thresholds for confidence and expiration checks Updated the covariance thresholds in the Tracker class to improve confidence and expiration logic, enhancing the accuracy of object tracking.
- fix: adjust existence probability threshold of expiration
* refactor(tracker): improve UUID formatting in tracker_base.hpp Updated the UUID formatting logic in the Tracker class to use a constant for the UUID size and ensure proper type casting, enhancing code clarity and maintainability. * fix(types): cap existence probability to a maximum of 0.999 Added a check to ensure that the existence probability does not exceed 0.999, addressing potential issues with overly high values that may not be set correctly. ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(multi_object_tracker): remove unused function getMeasurementYaw (#10527)
- fix(multi_object_tracker): remove unused function isChannelSpawnEnabled (#10528)
- Contributors: Ryuta Kambe, Taekjin LEE, TaikiYamada4
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
- Merge remote-tracking branch 'origin/main' into humble
- feat(multi object tracker): tracker overlap threshold
(#10456)
- preparation
- feat(autoware_multi_object_tracker): enhance matrix initialization and add debug logging for tracker removal
- refactor(autoware_multi_object_tracker): replace vector matrices with Eigen matrices in AssociatorConfig
- feat(autoware_multi_object_tracker): integrate max distance matrix for tracker removal logic
- refactor(autoware_multi_object_tracker): remove debug logging for tracker removal process
- style(pre-commit): autofix
- refactor(autoware_multi_object_tracker): remove unused string include in association.cpp
- refactor(autoware_multi_object_tracker): remove commented debug logging in association.cpp
- refactor(autoware_multi_object_tracker): remove distance_threshold parameter and update related configurations
* refactor(multi_object_tracker_node): change Eigen::Map to use const for matrix initialization ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(multi_object_tracker): add required headers (#10461)
- fix(autoware_multi_object_tracker): fix bicycle renovation vector dimension (#10449) fix a bug in updateStatePoseVel
- feat(autoware_multi_object_tracker): implement time keeper
(#10431)
- feat(multi_object_tracker): integrate ScopedTimeTrack for detailed processing time tracking
* feat(multi_object_tracker): add parameter for detailed processing time publishing ---------
- feat(autoware_multi_object_tracker): vehicle's ego frame as a parameter (#10428)
- feat(multi_object_tracker): add diagnostics warning when
extrapolation time exceeds limit with latency guarantee enabled
(#10301)
- feat(multi_object_tracker): add diagnostics warning when extrapolation time exceeds limit with latency guarantee enabled
- feat(multi_object_tracker): handled the case last_updated_time_ initialized as 0
* feat(multi_object_tracker): refactored to give better structure diagnostic force updated when published
- style(pre-commit): autofix
- feat(multi_object_tracker): add published tracker count check
- style(pre-commit): autofix
- feat(multi_object_tracker): fix checkAllTiming complexity
- style(pre-commit): autofix
- feat(multi_object_tracker): check consecutive warning duration
- style(pre-commit): autofix
- feat(multi_object_tracker): diag messages updated
- feat(multi_object_tracker): diag messages updated
- style(pre-commit): autofix
- style(pre-commit): autofix
* feat(multi_object_tracker): messages fix ---------Co-authored-by: lei.gu <<lei.gu@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat(autoware_multi_object_tracker): update overlapped tracker removing process in multi obj tracker (#10347) Update overlapped tracker removing process Co-authored-by: Taekjin LEE <<taekjin.lee@tier4.jp>>
- feat(autoware_multi_object_tracker): selective update per channel
(#10277)
- refactor(bicycle_motion_model): implement exponential decay for slip angle in state prediction
* Revert "refactor(multi_object_tracker): simplify input channel configuration by removing trust flags and consolidating parameters" This reverts commit c5155ef2e978b411955ace35f412bbf76c96f354.
- refactor(multi_object_tracker): update measure function signatures to include InputChannel parameter
- refactor(multi_object_tracker): add updateStatePoseVel method to BicycleMotionModel and update measurement logic in VehicleTracker
- refactor(multi_object_tracker): update measureWithPose method to include InputChannel parameter and adjust related logic
- refactor(multi_object_tracker): remove BicycleTracker and update references to use VehicleTracker
- refactor(bicycle_tracker): add tracking_offset to adjust object position based on motion model
- refactor(multi_object_tracker): remove BicycleTracker and replace with VehicleTracker in relevant classes
- refactor(input_channels): disable trust flags for extension and orientation in radar configurations
- refactor(input_channels): restructure flags for input channel properties
* refactor(input_channels): remove 'flags' from required properties in schema ---------
- Contributors: Amadeusz Szymko, Ryohsuke Mitsudome, TadaKazuto, Taekjin LEE, Takagi, Isamu, lei.gu
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- fix(autoware_multi_object_tracker): unknown object orientation
(#10286)
- fix(unknown_tracker): update object pose orientation and streamline uncertainty modeling in input manager
* fix(object_model): correct bounding box calculation by initializing limits and including min_z ---------
- refactor(multi_object_tracker): internal message driven process
(#10203)
* refactor(multi_object_tracker): streamline input channel
configuration handling feat(multi_object_tracker): introduce
InputChannel struct for input channel configuration
refactor(multi_object_tracker): improve marker handling and
initialization in TrackerObjectDebugger
feat(multi_object_tracker): enhance InputChannel with trust flags
for object properties refactor(multi_object_tracker): remove
unused channel_size parameter from tracker constructors
feat(multi_object_tracker): update InputChannel flags to trust
object extension and classification fix(multi_object_tracker):
replace channel.index with channel_index for consistency
feat(multi_object_tracker): update TrackerObjectDebugger and
TrackerProcessor to accept channels_config parameter
refactor(multi_object_tracker): remove redundant existence
probability initialization from tracker constructors
feat(multi_object_tracker): integrate data association into
TrackerProcessor and add associate method
feat(multi_object_tracker): enhance updateWithMeasurement to
include channel_info for improved classification handling
refactor(multi_object_tracker): replace object_id with uuid in
DynamicObject and related classes fix(multi_object_tracker):
update UUID handling in Tracker to use uuid_msg for consistency
refactor(multi_object_tracker): simplify pose and covariance
handling in tracker classes refactor(multi_object_tracker):
replace pose_with_covariance with separate pose and covariance
attributes in DynamicObject refactor: remove z state from tracker.
it will uses object state refactor(multi_object_tracker):
streamline object handling in trackers and remove unnecessary shape
processing refactor(multi_object_tracker): remove z position
handling from trackers and update object kinematics structure
refactor(multi_object_tracker): remove BoundingBox structure from
trackers and implement object extension limits
refactor(multi_object_tracker): remove unnecessary blank lines in
tracker getTrackedObject methods refactor(multi_object_tracker):
simplify input channel configuration by removing trust flags and
consolidating parameters
- refactor(multi_object_tracker): use const reference in loop and simplify tracker update logic
- refactor(multi_object_tracker): update shape handling and streamline object tracking logic
- refactor(multi_object_tracker): update shape handling to use geometry_msgs::msg::Point for anchor vectors
- style(pre-commit): autofix
* refactor(multi_object_tracker): modify getNearestCornerOrSurface function signature and update related logic refactor(multi_object_tracker): remove self_transform parameter from measure and update methods refactor(multi_object_tracker): update calcAnchorPointOffset function signature and streamline object handling refactor(multi_object_tracker): set shape type to BOUNDING_BOX for object trackers ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- Contributors: Hayato Mizushima, Taekjin LEE, Yutaka Kondo
0.42.0 (2025-03-03)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
- Contributors: Fumiya Watanabe, 心刚
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- feat(multi_object_tracker): integrate odometry and transform
processes
(#9912)
- feat: Add odometry processor to multi-object tracker
- refactor: Refactor Odometry class for improved code organization and readability
- feat: Refactor Odometry class for improved code organization and readability
* refactor: Transform objects to world coordinate in Odometry class refactor: Transform objects to world coordinate in Odometry class refactor: Update Odometry class to get transform from tf with source frame ID feat: Update Odometry class to get transform from tf with source frame ID fix: move necessare tr2 header * Revert "refactor: Transform objects to world coordinate in Odometry class" This reverts commit efca28a40105f80deb09d57b55cb6f9d83ffda2c.
- refactor: Remove unnecessary tf2 headers from tracker models
- fix: move transform obtainer to odometry class
- refactor: Update Odometry class to get transform from tf with source frame ID
- refactor: Transform objects to world coordinate in Odometry class
- refactor: remove transformObjects from shapes
- refactor: Update Odometry class to use 'updateFromTf' instead of 'setOdometryFromTf'
- refactor: Update Odometry class to use 'updateFromTf' instead of 'setOdometryFromTf'
- refactor: Update InputManager to include Odometry in constructor
- refactor: Move odometry.cpp to lib folder
- move object transform to input stream
- refactor: Add enable_odometry_uncertainty parameter to Odometry constructor
- refactor: Update Odometry class to return optional Odometry from getOdometryFromTf
- refactor: Update Odometry class to use tf_cache_ for storing and retrieving transforms
- refactor: Update Odometry class to use tf_cache_ for storing and retrieving transforms
- refactor: bring odometry covariance modeler into odometry class
- refactor: Remove redundant code for updating tf cache in Odometry::updateTfCache
* refactor: Update runProcess parameter name to detected_objects ---------
- feat: tier4_debug_msgs to autoware_internal_debug_msgs in files perc… (#9879) feat: tier4_debug_msgs to autoware_internal_debug_msgs in files perception/autoware_multi_object_tracker
- chore(autoware_multi_object_tracker): fix autoware univserse
documentation page
(#9772)
- feat: Add descriptions for confidence thresholds in multi_object_tracker_node schema
* feat: Update multi_object_tracker_node schema with confidence threshold descriptions ---------
- refactor(autoware_multi_object_tracker): define a new internal
object class
(#9706)
- feat: Add dynamic_object.hpp to object_model directory
- chore: Update autoware_perception_msgs include statements in association.hpp and dynamic_object.hpp
- fix: replace object message type to the DynamicObject type
- chore: Update autoware_perception_msgs include statements in association.hpp and dynamic_object.hpp
- chore: add channel index to the DynamicObjects
* Revert "chore: add channel index to the DynamicObjects" This reverts commit c7e73f08a8d17b5b085dd330dbf187aabbec6879.
- fix: replace trackedobject in the process
- fix: Replace transformObjects with shapes::transformObjects for object transformation
- chore: add channel index to the DynamicObjects
- feat: separate shape related functions
- chore: clean up utils.hpp
- chore: Update function signatures to use DynamicObjectList instead of DynamicObjects
- chore: Add channel index to DynamicObject and DynamicObjectList
- chore: Refactor processor and debugger classes to remove channel_index parameter
- chore: Refactor multiple_vehicle_tracker.cpp and debugger.cpp
- Refactor object tracker classes to remove self_transform parameter
- Refactor object tracker classes to use shapes namespace for shape-related functions
- Refactor object tracker classes to use types.hpp for object model types
- Refactor object tracker classes to remove unused utils.hpp
- Refactor object tracker classes to use types.hpp for object model types
- chore: rename to types.cpp
- rename getDynamicObject to toDynamicObject
* Update perception/autoware_multi_object_tracker/lib/object_model/shapes.cpp Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> ---------Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- fix(autoware_multi_object_tracker): fix bugprone-errors (#9651) fix: bugprone-errors
- refactor(autoware_multi_object_tracker): add configurable tracker
parameters
(#9621)
- refactor(autoware_multi_object_tracker): add configurable tracker parameters
- style(pre-commit): autofix
- refactor(autoware_multi_object_tracker): remove default values from parameter declarations
- refactor(autoware_multi_object_tracker): update schema file
- style(pre-commit): autofix
- Update perception/autoware_multi_object_tracker/src/processor/processor.cpp
* Update perception/autoware_multi_object_tracker/src/processor/processor.cpp ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com> Co-authored-by: Taekjin LEE <<technolojin@gmail.com>>
- Contributors: Fumiya Watanabe, Taekjin LEE, Vishal Chauhan, jakor97, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- fix: fix ticket links in CHANGELOG.rst (#9588)
- chore(package.xml): bump version to 0.39.0
(#9587)
- chore(package.xml): bump version to 0.39.0
- fix: fix ticket links in CHANGELOG.rst
* fix: remove unnecessary diff ---------Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>>
- fix: fix ticket links in CHANGELOG.rst (#9588)
- fix(autoware_multi_object_tracker): measure latency with latest
detection update time
(#9533)
- fix: measure latency with latest detection update time
* fix: remove duplicated current_time ---------
- fix(cpplint): include what you use - perception (#9569)
- ci(pre-commit): autoupdate (#8949) Co-authored-by: M. Fatih Cırıt <<mfc@autoware.org>>
- fix(autoware_multi_object_tracker): fix clang-diagnostic-unused-private-field (#9491)
- 0.39.0
- update changelog
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- feat(autoware_multi_object_tracker): new function to add odometry
uncertainty
(#9139)
- feat: add Odometry uncertainty to object tracking
* feat: Add odometry heading uncertainty to object pose covariance feat: Rotate object pose covariance matrix to account for yaw uncertainty Rotate the object pose covariance matrix in the uncertainty_processor.cpp file to account for the yaw uncertainty. This ensures that the covariance matrix accurately represents the position uncertainty of the object. Refactor the code to rotate the covariance matrix using Eigen's Rotation2D class. The yaw uncertainty is added to the y-y element of the rotated covariance matrix. Finally, update the object_pose_cov array with the updated covariance values. Closes #123 * feat: Add odometry motion uncertainty to object pose covariance refactoring
- feat: Update ego twist uncertainty to the object velocity uncertainty
- feat: update object twist covariance by odometry yaw rate uncertainty
- feat: move uncertainty modeling to input side
- feat: add option to select odometry uncertainty
- refactor: rename consider_odometry_uncertainty to enable_odometry_uncertainty
* fix: transform to world first, add odometry covariance later style(pre-commit): autofix * feat: Add odometry heading uncertainty to object pose covariance ---------
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- Contributors: Esteve Fernandez, Fumiya Watanabe, M. Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, Yutaka Kondo, awf-autoware-bot[bot], kobayu858
0.39.0 (2024-11-25)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- Contributors: Esteve Fernandez, Yutaka Kondo
0.38.0 (2024-11-08)
- unify package.xml version to 0.37.0
- refactor(object_recognition_utils): add autoware prefix to object_recognition_utils (#8946)
-
feat(autoware_multi_object_tracker): Set maximum reverse velocity to bicycle and crtv motion models (#9019) * feat: Add maximum reverse velocity to bicycle and CTRV motion models revert the tracker orientation when the velocity exceed the maximum reverse velocity refactor: Update motion model parameters for bicycle and CTRV motion models * refactor: check the max_reverse_vel configuration is correct max_reverse_vel is expected to be negative * refactor: remove config checker in the initializer ---------
- refactor(autoware_multi_object_tracker): separate detected object
covariance modeling
(#9001)
- refactor: update object model includes in tracker models
* feat: add uncertainty processor for object tracking feat: refactor uncertainty processing for object tracking feat: impl obj class model feat: Update object model measurement covariances Refactor the object model measurement covariances in the [object_model.hpp]{.title-ref} file. Update the velocity long and velocity lat measurement covariances for different object model types. refactor: Model object uncertainty in multi_object_tracker_node.cpp feat: Update object model measurement covariances in object_model.hpp feat: Update uncertainty processing for object tracking fix: remove uncertainty modelling in trackers refactor: Remove unused function isLargeVehicleLabel The function isLargeVehicleLabel in utils.hpp is no longer used and can be safely removed. Revert "refactor: Remove unused function isLargeVehicleLabel" This reverts commit 23e3eff511b21ef8ceeacb7db47c74f747009a32. feat: Normalize uncertainty in object tracking This commit adds a new function [normalizeUncertainty]{.title-ref} to the [uncertainty_processor.hpp]{.title-ref} and [uncertainty_processor.cpp]{.title-ref} files. The function normalizes the position and twist covariance matrices of detected objects to ensure minimum values for distance, radius, and velocity. This helps improve the accuracy and reliability of object tracking.
- refactor: update motion model parameters for object tracking
- refactor: update yaw rate limit in object model
* Revert "refactor: update yaw rate limit in object model" This reverts commit 6e8b201582cb65673678029dc3a781f2b7126f81. * refactor: update object model measurement covariances Refactor the object model measurement covariances in the [object_model.hpp]{.title-ref} file. Update the velocity long and velocity lat measurement covariances for different object model types.
- refactor: update motion model parameters comments
- refactor: remove comment
- style(pre-commit): autofix
* feat: Update copyright notice in uncertainty_processor.hpp Update the copyright notice in the uncertainty_processor.hpp file to reflect the correct company name. * refactor: update runProcess function parameters in multi_object_tracker_node.hpp ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_multi_object_tracker): update yaw with range-limited innovation (#8976) fix: update yaw with range-limited innovation
- feat(autoware_multi_object_tracker): reduce trigger latency
(#8657)
- feat: timer-based trigger with phase compensation
- chore: update comments, name of variable
- chore: declare min and max publish interval ratios
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_multi_object_tracker): output from screen to both (#8407)
- fix(autoware_multi_object_tracker): fix unusedFunction (#8573) fix:unusedFunction
- chore(autoware_multi_object_tracker): fix typo in
input_channels.schema.json
(#8515)
* fix(schema): fix typo in input_channels.schema.json Fixed a typo
in the "lidar_pointpainting" key in the
input_channels.schema.json file.
- fix: fix typo in lidar_pointpainting key
* chore: fix typo of lidar_pointpainitng channel ---------Co-authored-by: Shintaro Tomie <<58775300+Shin-kyoto@users.noreply.github.com>>
- refactor(kalman_filter): prefix package and namespace with autoware
(#7787)
- refactor(kalman_filter): prefix package and namespace with autoware
- move headers to include/autoware/
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- docs(autoware_multi_object_tracker): update input_channels schema with default values (#8473) chore(perception): update input_channels schema with default values
- fix(autoware_multi_object_tracker): enable trigger publish when delay_compensation is false (#8484) fix: enable trigger publish when delay_compensation is false
- fix(autoware_multi_object_tracker): fix functionConst (#8424) fix:functionConst
- docs(autoware_multi_object_tracker): add default values on the
schema json
(#8179)
- Refractored the parameters, build the schema file, updated the readme file.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_multi_object_tracker): fix functionConst
(#8290)
- fix:functionConst
- fix:functionConst
* fix:clang format ---------
- fix(autoware_multi_object_tracker): revert latency reduction
logic and bring back to timer trigger
(#8277)
- fix: revert latency reduction logic and bring back to timer trigger
- style(pre-commit): autofix
* chore: remove unused variables ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- fix(autoware_multi_object_tracker): fix uninitMemberVar (#8335) fix:uninitMemberVar
- fix(autoware_multi_object_tracker): fix passedByValue (#8231) fix:passedByValue
- fix(multi_object_tracker, object_merger, radar_object_tracker,
tracking_object_merger): fix knownConditionTrueFalse warnings
(#8137)
- fix: cppcheck knownConditionTrueFalse
- fix
* fix
- fix(autoware_multi_object_tracker): missing parameter schema path fix (#8120) fix: missing parameter schema path fix
- fix(multi_object_tracker): fix funcArgNamesDifferent (#8079) fix:funcArgNamesDifferent
- refactor(multi_object_tracker): bring parameter schema to new package folder (#8105) refactor: bring parameter schema to new package folder
- refactor(multi_object_tracker)!: add package name prefix of
autoware_
(#8083)
- refactor: rename multi_object_tracker package to autoware_multi_object_tracker
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- Contributors: Boyang, Esteve Fernandez, Ryuta Kambe, Taekjin LEE, Yutaka Kondo, kminoda, kobayu858
0.26.0 (2024-04-03)
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/multi_object_tracker.launch.xml
-
- selected_input_channels [default: ['detected_objects']]
- output [default: objects]
- tracker_setting_path [default: $(find-pkg-share autoware_multi_object_tracker)/config/multi_object_tracker_node.param.yaml]
- data_association_matrix_path [default: $(find-pkg-share autoware_multi_object_tracker)/config/data_association_matrix.param.yaml]
- input_channels_path [default: $(find-pkg-share autoware_multi_object_tracker)/config/input_channels.param.yaml]