
Package Summary
| Tags | No category tags. |
| Version | 0.43.0 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-04 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Apex.AI, Inc.
- Taiki Tanaka
- Takeshi Miura
- Yoshi Ri
Authors
autoware_perception_rviz_plugin
Purpose
It is an rviz plugin for visualizing the result from perception module. This package is based on the implementation of the rviz plugin developed by Autoware.Auto.
See Autoware.Auto design documentation for the original design philosophy. [1]
Input Types / Visualization Results
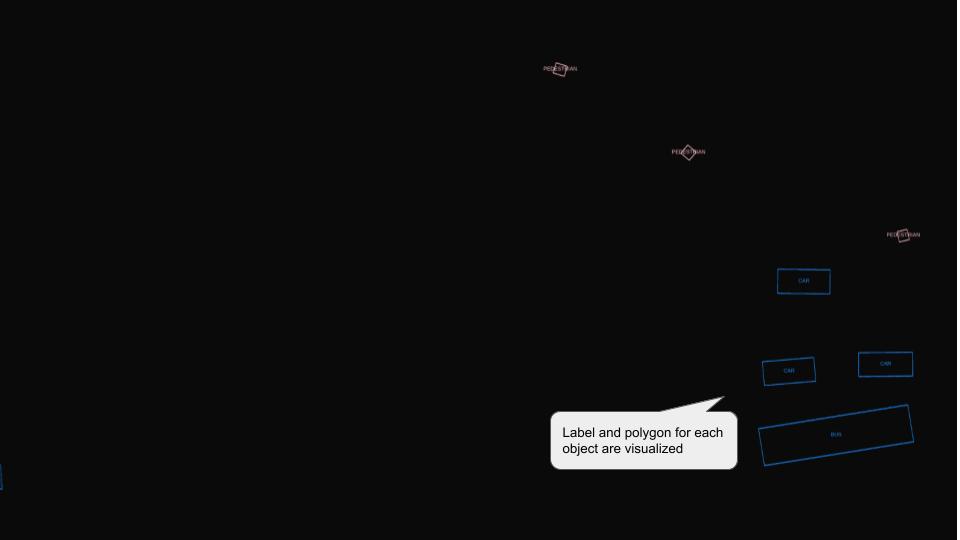
DetectedObjects
Input Types
| Name | Type | Description |
|---|---|---|
autoware_perception_msgs::msg::DetectedObjects |
detection result array |
Visualization Result
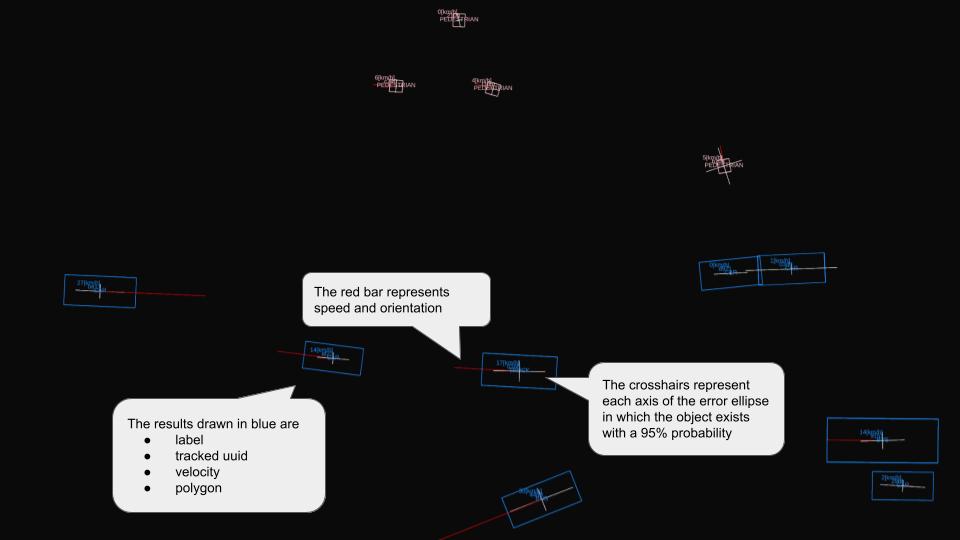
TrackedObjects
Input Types
| Name | Type | Description |
|---|---|---|
autoware_perception_msgs::msg::TrackedObjects |
tracking result array |
Visualization Result
Overwrite tracking results with detection results.
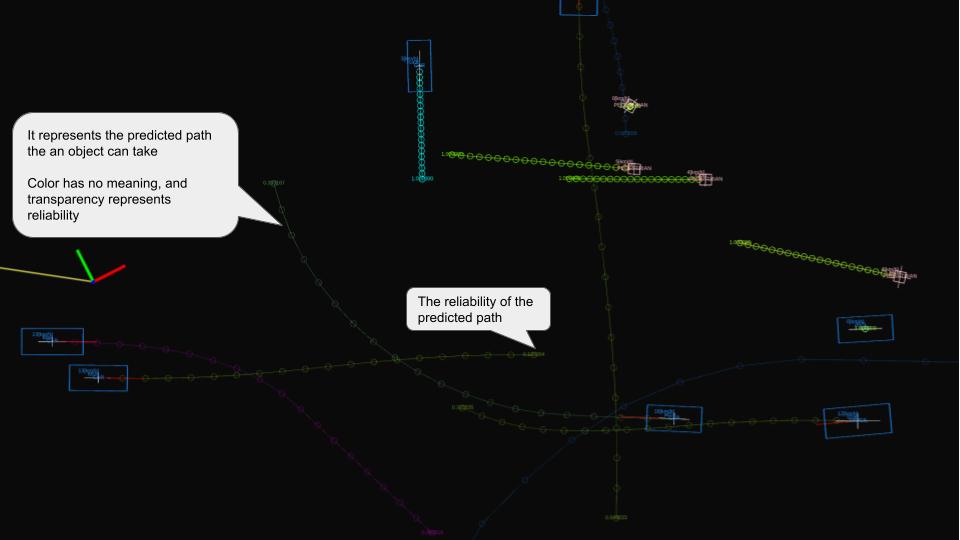
PredictedObjects
Input Types
| Name | Type | Description |
|---|---|---|
autoware_perception_msgs::msg::PredictedObjects |
prediction result array |
Visualization Result
Overwrite prediction results with tracking results.
References/External links
Future extensions / Unimplemented parts
Changelog for package autoware_perception_rviz_plugin
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- chore: refine maintainer list
(#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
- Contributors: Fumiya Watanabe, Shunsuke Miura
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- chore(package.xml): bump version to 0.38.0
(#9266)
(#9284)
- unify package.xml version to 0.37.0
- remove system_monitor/CHANGELOG.rst
- add changelog
* 0.38.0
- Contributors: Esteve Fernandez, Yutaka Kondo
0.38.0 (2024-11-08)
- unify package.xml version to 0.37.0
- fix(autoware_perception_rviz_plugin): fix unusedFunction (#8784) fix: unusedFunction
- feat(autoware_perception_rviz_plugin): rviz predicted path mark
as triangle
(#8536)
- refactor: predicted path mark replace to triangle
* chore: clean up ---------
- fix(autoware_perception_rviz_plugin): fix passedByValue
(#8192)
- fix: passedByValue
* fix:passedByValue ---------Co-authored-by: kobayu858 <<yutaro.kobayashi@tier4.jp>>
- chore(autoware_perception_rviz_plugin): delete maintainer (#7900)
- fix(autoware_perception_rviz_plugin): fix duplicateBranch
warnings
(#7695)
- fix(autoware_perception_rviz_plugin): fix duplicateBranch warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]\@users.noreply.github.com>
- feat!: replace autoware_auto_msgs with autoware_msgs for common modules (#7239) Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>>
- feat(autoware_auto_perception_rviz_plugin)!: rename package to autoware_perception_rviz_plugin (#7221) feat(autoware_auto_perception_rviz_plugin): rename package to autoware_perception_rviz_plugin Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- Contributors: Hayate TOBA, Nagi70, Ryohsuke Mitsudome, Ryuta Kambe, Satoshi Tanaka, Taekjin LEE, Yutaka Kondo
0.26.0 (2024-04-03)
- feat: add rviz plugin packages
(#3)
- release v0.4.0
- remove ROS1 packages temporarily
- add sample ros2 packages
- remove ROS1 packages
* Revert "remove ROS1 packages temporarily" This reverts commit 7eacbcea261a65d6c305c7b0d069591ca3a2ee3a.
- add COLCON_IGNORE to ros1 packages
- Port autoware-perception-rviz-plugin (#100)
- Port to ROS2
- Update namespaces
- Port autoware-planning-rviz-plugin (#103)
- Port to ROS2
- Update deprecated
- Update namespaces
- Adjust copyright notice on 532 out of 699 source files (#143)
- Use quotes for includes where appropriate (#144)
- Use quotes for includes where appropriate
- Fix lint tests
- Make tests pass hopefully
- Run uncrustify on the entire Pilot.Auto codebase (#151)
- Run uncrustify on the entire Pilot.Auto codebase
- Exclude open PRs
- Fix rviz plugins (#175)
- [autoware_perception_rviz_plugin] make library to shared and fix library name in plugin_description.xml
- [autoware_planning_rviz_plugin] make library to shared and fix library name in plugin_description.xml
- Port autoware vehicle rviz plugin (#111)
- Port to ROS2
- Amend buildtool
- Fix license
- Fix
- Fixes
- adding linters to autoware_planning_rviz_plugin (#224)
- adding linters to autoware_perception_rviz_plugin (#225)
- [autoware_perception_rviz_plugin] make plugin library SHARED (#236)
- Fix bugs in autoware vehicle rviz plugin (#246)
- Ros2 v0.8.0 autoware vehicle rviz plugin (#333)
- add test depend
- fix console meter size (#909)
- update to change font scale (#910)
- Fix typos in common modules (#914)
- fix typos in common modules
- minor fix (lowercasing)
- revert changes in PathPoint.msg
- Fix memory leaks in turn signal plugin (#932)
- fix memory leak (QPointF)
- convert raw pointers to smart pointers
- update handle image (#948)
- reduce calc cost rviz plugin (#947)
- reduce calc cost
- cosmetic change
- cosmetic change
* Use CMAKE_CXX_STANDARD to enable C++14 for Qt Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- change font size independency desplay (#946)
- bug fix (wrong unit conversion) (#956)
- Refactor autoware_vehicle_rviz_plugin (#967)
- Refactor autoware_vehicle_rviz_plugin
- change smart pointers to raw pointers according to Qt convention
- remove unused headers
- remove unused variables
- cosmetic changes according to Google C++ Style Guide
- use the range-based for statement
- replace push_back with emplace_back See also: #932, #964
- Apply clang-format
- Change a variable name to clarify: history -> histories
- add build testing
- appply ament_uncrustify
- apply lint
* fix bug Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- Ros2 v0.8.0 autoware perception rviz plugin (#334)
- Fix typos in common modules (#914)
- fix typos in common modules
- minor fix (lowercasing)
- revert changes in PathPoint.msg
- ament_cmake_cppcheck -> ament_lint_common
* apply lint Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- Ros2 v0.8.0 autoware planning rviz plugin (#336)
- add speed limit visualizer (#908)
- add speed limit visualizer
-
- put_litter_in_its_place
- add max velocity output
- fix bug
* update visualizer Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
- change font size independency desplay (#946)
- ament_cmake_cppcheck -> ament_lint_common
- apply lint
* change topic type Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- Ros2 v0.8.0 remove std msgs awapi (#348)
- [autoware_vehicle_msgs] add BatteryStatus msg
- [autoware_planning_msgs] add ExpandStopRange and StopSpeedExceeded messages
- [autoware_api_msgs] add DoorControlCommand, StopCommand, and VelocityLimit messages
- remove std_msgs related to autoware_awaiv_adapter node
- apply ament_uncrustify
- fix build failure
- fix test failures
- address review commends
- Ros2 v0.9.0 pose history (#387)
- Port pose history to ROS2
- pose_history (#1169)
- change pkg name
* add alpha Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- fix max velocity visualization (#397)
- fix max velocity vis
- apply lint-format
- Ros2 rtd plugin (#444)
- Use RTD instead of MFD
- Sync public repo (#1228)
- [simple_planning_simulator] add readme (#424)
- add readme of simple_planning_simulator
- Update simulator/simple_planning_simulator/README.md
- set transit_margin_time to intersect. planner (#460)
- Fix pose2twist (#462)
- Ros2 vehicle info param server (#447)
- add vehicle_info_param_server
- update vehicle info
- apply format
- fix bug
- skip unnecessary search
- delete vehicle param file
- fix bug
- Ros2 fix topic name part2 (#425)
- Fix topic name of traffic_light_classifier
- Fix topic name of traffic_light_visualization
- Fix topic name of traffic_light_ssd_fine_detector
- Fix topic name of traffic_light_map_based_detector
- Fix lint traffic_light_recognition
- Fix lint traffic_light_ssd_fine_detector
- Fix lint traffic_light_classifier
- Fix lint traffic_light_classifier
- Fix lint traffic_light_ssd_fine_detector
- Fix issues in hdd_reader (#466)
- Fix some issues detected by Coverity Scan and Clang-Tidy
- Update launch command
- Add more [close(new_sock)]{.title-ref}
- Simplify the definitions of struct
- fix: re-construct laneletMapLayer for reindex RTree (#463)
- Rviz overlay render fix (#461)
- Moved painiting in SteeringAngle plugin to update()
- super class now back to MFD
- uncrustified
- acquire data in mutex
- back to RTD as superclass
- Rviz overlay render in update (#465)
- Moved painiting in SteeringAngle plugin to update()
- super class now back to MFD
- uncrustified
- acquire data in mutex
- removed unnecessary includes and some dead code
- Adepted remaining vehicle plugin classes to render-in-update concept. Returned to MFD superclass
* restored RTD superclass Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Makoto Tokunaga <<vios-fish@users.noreply.github.com>> Co-authored-by: Adam Dąbrowski <<adam.dabrowski@robotec.ai>>
- Unify Apache-2.0 license name (#1242)
- Porting trajectory rviz plugin (#1295)
- update trajectory rviz plugin to show velocity (#1257)
- update trajectory rviz plugin to show velocity
- use size_t instead of int to remove warning during compiling
- not show velocity on rviz unless check button is enabled
- modify visibility of velocity (#1258)
- fix plugin
* add dependency Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
- Fix msgs (#1379)
- Fix msgs
* [autoware_planning_rviz_plugin]: Fix lint Co-authored-by: wep21 <<border_goldenmarket@yahoo.co.jp>> * Fix topic name of autoware_perception_rviz_plugin (#1277) (#1479) Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* Fix lint Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- Add pre-commit (#1560)
- add pre-commit
- add pre-commit-config
- add additional settings for private repository
- use default pre-commit-config
- update pre-commit setting
- Ignore whitespace for line breaks in markdown
* Update .github/workflows/pre-commit.yml Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- exclude svg
- remove pretty-format-json
- add double-quote-string-fixer
- consider COLCON_IGNORE file when seaching modified package
- format file
- pre-commit fixes
- Update pre-commit.yml
* Update .pre-commit-config.yaml Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: pre-commit <<pre-commit@example.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
- Fix -Wunused-parameter (#1836)
- Fix -Wunused-parameter
- Fix mistake
- fix spell
- Fix lint issues
* Ignore flake8 warnings Co-authored-by: Hiroki OTA <<hiroki.ota@tier4.jp>>
- suppress warnings for common packages (#1891)
- add maybe unused
- add Werror
- fix for uncrustify
- add sort-package-xml hook in pre-commit (#1881)
- add sort xml hook in pre-commit
- change retval to exit_status
- rename
- add prettier plugin-xml
- use early return
- add license note
- add tier4 license
- restore prettier
- change license order
- move local hooks to public repo
- move prettier-xml to pre-commit-hooks-ros
- update version for bug-fix
- apply pre-commit
- add autoware_state_rviz_plugin (#2160)
- initial commit
- fix
- use raw pointer
- fix style
- fix style
- fix style
- fix style
- fix header arrangement
- add gear check and prefix label (#2173)
- add gear and prefix label
- add subscription
- fix for cpplint
- add engage button and status (#2257)
- fix style
- add engage button and engage status
- use api
- fix for pre commit
- fix for cpplint
- fix
- fix for cpplint
- fix for cpplint
- fix coding style
- Add datetime panel (#2275)
- Add datetime panel
- Fix/ros time (#2276)
- Fix ros time
* Add icon Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>>
- add footprint in trajectory msg of rviz plugin (#1553) (#1684)
- add footprint in trajectory msg of rviz plugin (#1553)
- add footprint in trajectory msg of rviz plugin
- update
- trajectory -> footprint
- update
- add icons
- rename trajectory footprint from footprint
- add PathFootprint
- update
* Add min value Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>>
- Feature/trajectory point rviz plugin (#2123)
- add trajectory point
- set trajectory point view false by default
- add pull over/out module (#2147)
- Change formatter to clang-format and black (#2332)
* Revert "Temporarily comment out pre-commit hooks" This reverts commit 748e9cdb145ce12f8b520bcbd97f5ff899fc28a3.
- Replace ament_lint_common with autoware_lint_common
- Remove ament_cmake_uncrustify and ament_clang_format
- Apply Black
- Apply clang-format
- Fix build errors
- Fix for cpplint
- Fix include double quotes to angle brackets
- Apply clang-format
- Fix build errors
- remove unused depends (#496)
- Add COLCON_IGNORE (#500)
- port planning rviz plugins (#492)
- port planning rviz plugins
* remove COLCON_IGNORE Co-authored-by: Takayuki Murooka <<takayuki.murooka@tier4.jp>>
- port autoware vehicle rviz plugin (#542)
- [ polar grid ] add readme polar grid remove colcon ignore (#559)
- remove ignore
- add readme
- fix invalid link
- port autoware_state_rviz_plugin (#563)
- remove COLCON_IGNORE form rviz plugins (#544)
- port autoware_perception_rviz_plugin (#581)
- add readme in rviz plugin (#591)
- [autoware_vehicle_rviz_plugin/route_handler/simple_planning_simulator]fix some packages (#606)
- fix console meter
- fix velocity_history
- fix route handler
- change topic name
- adding autoware_auto_perception_rviz_plugin (#574)
- [152] Implement BoundingBoxArray rviz display plugin.
- [285] Clear bounding box markers before adding new markers on new message
- [274] Trajectory visualization plugin
- raw types to sized type
- ControllerTestingNode: added publish_state(), publish_trajectory(), no timer hack to start test, all init is init()
* Squashed 'src/external/mpc/' changes from 8fc7cfdd..eaa5908b eaa5908b Merge branch 'input-weight-modify' into 'master' b9ee8e4f Update default mpc_controller_node parameters 8d15f49d Add weights to acceleration and steer controls; loosen simulation test case: git-subtree-dir: src/external/mpc git-subtree-split: eaa5908bdd987051a9dcd9c505f99bfd7f028547
- [#404] apply ament_auto macro to autoware_rviz_plugins
- Adding missing dependency on rviz2.
* Squashed 'src/external/autoware_auto_msgs/' changes from 56550efd..f40970ea f40970ea Adding velocity_mps to VehicleControlCommand. git-subtree-dir: src/external/autoware_auto_msgs git-subtree-split: f40970ead34d36a695b432dc37accff9d67c17e2
- Update copyright headers to transfer ownership to Autoware Foundation
* Add CHANGELOG and update package versions for release Add CHANGELOG and update package versions for release
- [#286] Parameterize boundingbox colors from rviz
- Add visualization colours via Qt
- [#813] use autoware_set_compile_options() for nearly all compiled tests
- fix a few causes of warnings and disable warning flags as needed for other tests
- set CXX_STANDARD strictly and only in a single place
- add CMake flag [AUTOWARE_OPTIMIZATION_OF_SLOW_TARGETS]{.title-ref}. Default: OFF
- update building instructions and MR template
- fix nasty initialization error of static constexpr member in [GenericState]{.title-ref} of Kalman filter
- [#910] remove private compilation warning ignore flags
- [#900] Implement rviz plugin to visualize TrackedObjects
- [#1110] Implement rviz plugin for DetectedObjects msg
- Resolve "Clarify meaning of pose in *ObjectKinematics messages"
- [#1221] Add co-developed entry to copyright
- [#1282] Fix double free in ObjectPolygonDisplayBase rviz plugin
- [#1355] Make DetectedObject shape corners be in object-local coordinates
- porting AAP perception visualization from https://github.com/tier4/AutowareArchitectureProposal.iv/blob/main/perception/util/visualizer/dynamic_object_visualization/include/dynamic_object_visualization/dynamic_object_visualizer.hpp
- rename to autoware_auto_perception_rviz_plugin
- fix copyright
- format code
- fix typo
- convert camel to snake case
* Apply suggestions from code review Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>>
- change color
- replace boost::optional to std::optional
- add icons
- set marker id to value corresponding to the upper 32 bits of uuid
- format code
- change motorsycle color
- add uuid map to set marker id
- format code
- remove brief comment
- fix lint error
- fix include sort
- format code
- fix include
* add autoware_auto_perception_rviz_plugin to pre commit excluded list Co-authored-by: Yunus Emre Caliskan <<yunus.ec@gmail.com>> Co-authored-by: Christopher Ho <<christopher.ho@apex.ai>> Co-authored-by: MIURA Yasuyuki <<kokosabu@gmail.com>> Co-authored-by: Jit Ray Chowdhury <<jit.ray.c@gmail.com>> Co-authored-by: Joshua Whitley <<josh.whitley@autoware.org>> Co-authored-by: Juan Pablo Samper <<jp.samper@apex.ai>> Co-authored-by: Jilada Eccleston <<jilada.eccleston@tier4.jp>> Co-authored-by: Frederik Beaujean <<Frederik.Beaujean@apex.ai>> Co-authored-by: Vincent Richard <<vincent.francois.richard@gmail.com>> Co-authored-by: Gowtham <<gowtham.ranganathan@apex.ai>> Co-authored-by: Nikolai Morin <<nikolai.morin@apex.ai>> Co-authored-by: Igor Bogoslavskyi <<igor.bogoslavskyi@gmail.com>> Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>>
- add autoware_auto_perception_rviz_plugin README (#631)
- fix readme sentence grammar (#634)
- Auto/fix perception viz (#639)
- add ns of uuid
- remove dynamic_object_visualization
- update to support velocity report header (#655)
- update to support velocity report header
* Update simulator/simple_planning_simulator/src/simple_planning_simulator/simple_planning_simulator_core.cpp Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>>
- use maybe_unused
* fix precommit Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>>
- adapt to actuation cmd/status as control msg (#646)
- adapt to actuation cmd/status as control msg
- fix readme
- fix topics
- fix remaing topics
- as to pacmod interface
- fix vehicle status
- add header to twist
- revert gyro_odometer_change
- revert twist topic change
- revert unchanged package
- FIx vehicle status topic name/type (#658)
- shift -> gear_status
- twist -> velocity_status
- Sync .auto branch with the latest branch in internal repository (#691)
- add trajectory point offset in rviz plugin (#2270)
- sync rc rc/v0.23.0 (#2258)
- fix interpolation for insert point (#2228)
- fix interpolation for insert point
- to prev interpolation pkg
* Revert "to prev interpolation pkg" This reverts commit 9eb145b5d36e297186015fb17c267ccd5b3c21ef. Co-authored-by: taikitanaka3 <<65527974+taikitanaka3@users.noreply.github.com>> Co-authored-by: taikitanaka <<ttatcoder@outlook.jp>>
- fix topic name (#2266)
- Add namespace to diag for dual_return_filter (#2269)
- Add a function to make 'geometry_msgs::msg::TransformStamped' (#2250)
- Add a function to make 'geometry_msgs::msg::TransformStamped'
- Add 'child_frame_id' as an argument of 'pose2transform'
- Simplify marker scale initialization (#2286)
- Fix/crosswalk polygon (#2279)
- extend crosswalk polygon
- improve readability
- fix polygon shape
- Add warning when decel distance calculation fails (#2289)
- [motion_velocity_smoother] ignore debug print (#2292)
- cosmetic change
- cahnge severity from WARN to DEBUG for debug info
- use util for stop_watch
- fix map based prediction (#2200)
- fix map based prediction
- fix format
- change map based prediction
- fix spells
- fix spells in comments
- fix for cpplint
- fix some problems
- fix format and code for clang-tidy
- fix space for cpplint
- Update Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- Update perception/object_recognition/prediction/map_based_prediction/Readme.md
- fix vector access method
- fix readme format
- add parameter
* Update perception/object_recognition/prediction/map_based_prediction/Readme.md Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> * Update perception/object_recognition/prediction/map_based_prediction/Readme.md Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> * Update perception/object_recognition/prediction/map_based_prediction/Readme.md Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- Update Readme.md
* Update perception/object_recognition/prediction/map_based_prediction/Readme.md Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- remove failure condition for 0 velocity trajectory (#2295)
- [mpc_follower] remove stop distance condition from stopState decision (#1916)
- [mpc_follower] remove stop distance condition from stopState decision
- add invalid index handling
- Move the debug marker initialization part to another file (#2288)
- Move the debug marker initialization part to 'debug.cpp'
- Make 'isLocalOptimalSolutionOscillation' independent from 'NDTScanMatcher' (#2300)
- Remove an unused function 'getTransform' (#2301)
- Simplify iteration of initial poses (#2310)
- Make a transform object const (#2311)
- Represent poses in 'std::vector' instead of 'geometry_msgs::msg::PoseArray' (#2312)
- Feature/no stopping area (#2163)
- add no stopping area module to behavior velocity planner
- apply utils
- add polygon interpolation module order stopline around area is considered
- devide jpass udge with stop line polygon
- update docs
- rename file name
- update to latest
- minor change for marker
* update license Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> * update license Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> * update license Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> * update license Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- minor fix
- add parameter tuning at experiment
- update readme
- format doc
- apply comments
- add exception gurd
- cosmetic change
- fix ament
- fix typo and remove for statement
- & to " "
- better ns
- return pass judge param
- add missing stoppable condition
- add clear pass judge and stoppable flag
- add comment
- precommit fix
* cpplint Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>>
- sync rc rc/v0.23.0 (#2281)
- Fix side shift planner (#2171) (#2172)
- add print debug
- remove forward shift points when adding new point
- remove debug print
- format
* Fix remove threshold Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>>
- Fix/pull out and pull over (#2175)
- delete unnecessary check
- fix condition of starting pull out
- Add emergency status API (#2174) (#2182)
- Fix/mpc reset prev result (#2185) (#2195)
- reset prev result
- clean code
- reset only raw_steer_cmd
* Update control/mpc_follower/src/mpc_follower_core.cpp Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>>
- [hotfix] 1 path point exception after resampling (#2204)
- fix 1 path point exception after resampling
- Apply suggestions from code review
* Apply suggestions from code review Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>>
- [hotfix] Fix lane ids (#2211)
- Fix lane ids
- Prevent acceleration on avoidance (#2214)
- prevent acceleration on avoidance
- fix param name
- parametrize avoidance acc
- change param name
- fix typo
- Fix qos in roi cluster fusion (#2218)
- fix confidence (#2220)
- too high confidence (#2229)
- Fix/obstacle stop 0.23.0 (#2232)
- fix unexpected slow down in sharp curves (#2181)
* Fix/insert implementation (#2186) Co-authored-by: Satoshi OTA <<44889564+satoshi-ota@users.noreply.github.com>>
- [hotfix] Remove exception in avoidance module (#2233)
- Remove exception
- Fix clock
- Remove blank line
- Update traffic light state if ref stop point is ahead of previous one (#2197)
- fix interpolation for insert point (#2228)
- fix interpolation for insert point
- to prev interpolation pkg
- fix index (#2265)
- turn signal calculation (#2280)
- add turn signal funtion in path shifter
* add ros parameters Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>> Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Satoshi OTA <<44889564+satoshi-ota@users.noreply.github.com>> Co-authored-by: taikitanaka3 <<65527974+taikitanaka3@users.noreply.github.com>> Co-authored-by: Sugatyon <<32741405+Sugatyon@users.noreply.github.com>>
- [behavior_path_planner] fix sudden path change around ego (#2305) (#2318)
- fix return-from-ego shift point generation logic
- change param for trimSimilarGradShiftPoint
- add comment for issue
- update comment
- replace code with function (logic has not changed)
- move func to cpp
- add comment for issue
- fix typo
* Update planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/src/scene_module/avoidance/avoidance_module.cpp Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> * Update planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/src/scene_module/avoidance/avoidance_module.cpp Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- Add functions to make stamped scalar messages (#2317)
- Fix/object yaw in intersection module (#2294)
- fix object orientation
- fix function name
- add guard (#2321)
- reduce cost (double to float) (#2298)
- Add detail collision check (#2274)
- Add detail collision check
- Remove unused function
- Fix arc length
- Seperate time margin
- Fix parameter name
- Update Readme
- Address review: Add comment for TimeDistanceArray
- Run pre-commit
- Fix cpplint
- Add return for empty polygon
- update CenterPoint (#2222)
- update to model trained by mmdet3d
- add vizualizer (debug)
- for multi-frame inputs
- chagne config
- use autoware_utils::pi
- project specific model and param
- rename vfe -> encoder
- rename general to common
- update download link
- update
- fix
- rename model_name
- change training toolbox link
- chage lint package
- fix test error
- commit suggestion
- Feature/lane change detection (#2331)
- add old information deleter
- fix access bug
- change to deque
- update obstacle buffer
- fix some bugs
- add lane change detector
- make a update lanelet function
- fix code style
- parameterize essential values
* Update perception/object_recognition/prediction/map_based_prediction/src/map_based_prediction_ros.cpp Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- fix slash position
- remove unnecessary lines
- fix format
- fix format
- change to new enum
- fix format
- fix typo and add guard
- change funciton name
* add lane change description Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>>
- Add Planning Evaluator (#2293)
* Add prototype planning evaluator Produced data for dist between points, curvature, and relative angle
- Cleanup the code to make adding metrics easier
- Add remaining basic metrics (length, duration, vel, accel, jerk)
- Add motion_evaluator to evaluate the actual ego motion + code cleanup
- Add deviation metrics
- Add naive stability metric
- Handle invalid stat (TODO: fix the output file formatting)
- Add parameter file and cleanup
- Add basic obstacle metric (TTC not yet implemented) and fix output file format
- Add basic time to collision
- Add lateral-distance based stability metric
- Add check (at init time) that metrics' maps are complete
- Publish metrics as ParamaterDeclaration msg (for openscenario)
- Use lookahead and start from ego_pose when calculating stability metrics
- Code cleanup
- Fix lint
- Add tests
- Fix bug with Frechet dist and the last traj point
- Finish implementing tests
- Fix lint
- Code cleanup
- Update README.md
- Remove unused metric
- Change msg type of published metrics to DiagnosticArray
- fix format to fix pre-commit check
- fix yaml format to fix pre-commit check
- fix yaml format
- apply clang-format
- apply clang-format
- Update planning/planning_diagnostics/planning_evaluator/include/planning_evaluator/planning_evaluator_node.hpp
- Update planning/planning_diagnostics/planning_evaluator/test/test_planning_evaluator_node.cpp
- Update planning/planning_diagnostics/planning_evaluator/test/test_planning_evaluator_node.cpp
* change lint format to autoware_lint_common Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>>
- Add keep braking function at driving state (#2346)
- Add keep braking function at driving state
- Remove debug messages
- Fix format
- Change diag_updater's pediod from default to 0.1sec (#2348)
- add cross judgement and common signal function (#2319)
- merge branch turn_signal_common
- add turn signal function in signal decider
- add cross judge in path_utilities and delete from turn_signal_decider
- remove original signal calculation in lane change
- omit substitution
- replace turn signal decider in pull over function
- modify cross judge logic
- replace turn signal decider in avoidance
- add readme of turn signal
- update
- delete print debug
- update
- delete lane change decider in path shifter
- delete blank line
- fix indent
- fix typo
- fix typo
- decrease nest
- run pre commit
- Add 0 limit at forward jerk velocity filter (#2340)
- add time offset param to point cloud concatenation (#2303)
- add offset param
* clang-format Co-authored-by: Akihito OHSATO <<aohsato@gmail.com>>
- Feature/add doc for keep braking function at driving state (#2366)
- Add the description of brake keeping
- Add the english document
- Improve description
- Add english description
- Fix include files (#2339)
- fix behavior intersection module
- fix behavior no stopping area module
- fix planning_evaluator
- fix motion_velocity_smoother
- rename variable
* Revert "[mpc_follower] remove stop distance condition from stopState decision (#1916)" This reverts commit ff4f0b5a844d1f835f1b93bd3b36a76747b0cd02. * Revert "Add keep braking function at driving state (#2346)" This reverts commit f0478187db4c28bf6092c198723dcc5ec11a9c70. * Revert "Feature/add doc for keep braking function at driving state (#2366)" This reverts commit 66de2f3924a479049fce2d5c5c6b579cacbd3e49.
- Fix orientation availability in centerpoint
- fix test_trajectory.cpp
- add target link libraries
- Use .auto msg in test code for planniing evaluator
* fix include Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: autoware-iv-sync-ci[bot] <87871706+autoware-iv-sync-ci[bot]\@users.noreply.github.com> Co-authored-by: taikitanaka3 <<65527974+taikitanaka3@users.noreply.github.com>> Co-authored-by: taikitanaka <<ttatcoder@outlook.jp>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: Takeshi Miura <<57553950+1222-takeshi@users.noreply.github.com>> Co-authored-by: Takeshi Ishita <<ishitah.takeshi@gmail.com>> Co-authored-by: Satoshi OTA <<44889564+satoshi-ota@users.noreply.github.com>> Co-authored-by: Makoto Kurihara <<mkuri8m@gmail.com>> Co-authored-by: purewater0901 <<43805014+purewater0901@users.noreply.github.com>> Co-authored-by: tkimura4 <<tomoya.kimura@tier4.jp>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>> Co-authored-by: Sugatyon <<32741405+Sugatyon@users.noreply.github.com>> Co-authored-by: s-murakami-esol <<81723883+s-murakami-esol@users.noreply.github.com>> Co-authored-by: Yusuke Muramatsu <<yukke42@users.noreply.github.com>> Co-authored-by: Maxime CLEMENT <<78338830+maxime-clem@users.noreply.github.com>> Co-authored-by: Shunsuke Miura <<37187849+miursh@users.noreply.github.com>> Co-authored-by: Shinnosuke Hirakawa <<8327162+0x126@users.noreply.github.com>> Co-authored-by: Akihito OHSATO <<aohsato@gmail.com>> Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>>
- [autoware_auto_perception_rviz_plugin]fix bug (#721)
- fix perception_marker
- fix missing commit
- apply format
- patch for PR721 (#722)
- fix id_map erase operation
- fix code to use c++11 function
- update tracked_objects_display
* fix bug Co-authored-by: Taichi Higashide <<taichi.higashide@tier4.jp>>
- fix rviz plugin (#743)
- move plugin packages
* add ignore file to apply pre-commit Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: Servando <<43142004+sgermanserrano@users.noreply.github.com>> Co-authored-by: Nikolai Morin <<nnmmgit@gmail.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: nik-tier4 <<71747268+nik-tier4@users.noreply.github.com>> Co-authored-by: Daisuke Nishimatsu <<42202095+wep21@users.noreply.github.com>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Kazuki Miyahara <<kmiya@outlook.com>> Co-authored-by: Kenji Miyake <<kenji.miyake@tier4.jp>> Co-authored-by: Takamasa Horibe <<horibe.takamasa@gmail.com>> Co-authored-by: Takagi, Isamu <<43976882+isamu-takagi@users.noreply.github.com>> Co-authored-by: Makoto Tokunaga <<vios-fish@users.noreply.github.com>> Co-authored-by: Adam Dąbrowski <<adam.dabrowski@robotec.ai>> Co-authored-by: Keisuke Shima <<keisuke.shima@tier4.jp>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>> Co-authored-by: wep21 <<border_goldenmarket@yahoo.co.jp>> Co-authored-by: Keisuke Shima <<19993104+KeisukeShima@users.noreply.github.com>> Co-authored-by: pre-commit <<pre-commit@example.com>> Co-authored-by: Hiroki OTA <<hiroki.ota@tier4.jp>> Co-authored-by: kyoichi sugahara <<81.s.kyo.19@gmail.com>> Co-authored-by: taikitanaka3 <<65527974+taikitanaka3@users.noreply.github.com>> Co-authored-by: Takayuki Murooka <<takayuki.murooka@tier4.jp>> Co-authored-by: Takeshi Miura <<57553950+1222-takeshi@users.noreply.github.com>> Co-authored-by: Taichi Higashide <<taichi.higashide@tier4.jp>> Co-authored-by: Yunus Emre Caliskan <<yunus.ec@gmail.com>> Co-authored-by: Christopher Ho <<christopher.ho@apex.ai>> Co-authored-by: MIURA Yasuyuki <<kokosabu@gmail.com>> Co-authored-by: Jit Ray Chowdhury <<jit.ray.c@gmail.com>> Co-authored-by: Joshua Whitley <<josh.whitley@autoware.org>> Co-authored-by: Juan Pablo Samper <<jp.samper@apex.ai>> Co-authored-by: Jilada Eccleston <<jilada.eccleston@tier4.jp>> Co-authored-by: Frederik Beaujean <<Frederik.Beaujean@apex.ai>> Co-authored-by: Vincent Richard <<vincent.francois.richard@gmail.com>> Co-authored-by: Gowtham <<gowtham.ranganathan@apex.ai>> Co-authored-by: Nikolai Morin <<nikolai.morin@apex.ai>> Co-authored-by: Igor Bogoslavskyi <<igor.bogoslavskyi@gmail.com>> Co-authored-by: autoware-iv-sync-ci[bot] <87871706+autoware-iv-sync-ci[bot]\@users.noreply.github.com> Co-authored-by: taikitanaka <<ttatcoder@outlook.jp>> Co-authored-by: Takeshi Ishita <<ishitah.takeshi@gmail.com>> Co-authored-by: Satoshi OTA <<44889564+satoshi-ota@users.noreply.github.com>> Co-authored-by: Makoto Kurihara <<mkuri8m@gmail.com>> Co-authored-by: purewater0901 <<43805014+purewater0901@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: Sugatyon <<32741405+Sugatyon@users.noreply.github.com>> Co-authored-by: s-murakami-esol <<81723883+s-murakami-esol@users.noreply.github.com>> Co-authored-by: Yusuke Muramatsu <<yukke42@users.noreply.github.com>> Co-authored-by: Maxime CLEMENT <<78338830+maxime-clem@users.noreply.github.com>> Co-authored-by: Shunsuke Miura <<37187849+miursh@users.noreply.github.com>> Co-authored-by: Shinnosuke Hirakawa <<8327162+0x126@users.noreply.github.com>> Co-authored-by: Akihito OHSATO <<aohsato@gmail.com>>
- Contributors: Tomoya Kimura
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| autoware_cmake | |
| rviz2 | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_perception_msgs | |
| rviz_common | |
| rviz_default_plugins |